
一种点云数据存储方法、装置、存储介质及电子设备.pdf

琰琬****买买


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种点云数据存储方法、装置、存储介质及电子设备.pdf
本申请提出一种点云数据存储方法、装置、存储介质及电子设备,对原始点云坐标数据进行抽稀处理,以获取待存储坐标数据;用于减少点云坐标数据的总量,为了避免将非常接近的任意两组原始点云坐标数据均作为待存储坐标数据,避免出现类似重复数据的情况出现,需要确保任意两个待存储坐标数据分别对应不同的唯一标识符,在减少数据量的情况下,避免出现重复数据,尽可能的保障数据的多样性。将待存储坐标数据写入目标瓦片文件;目标瓦片文件为待存储坐标数据对应的瓦片格式名称表征的瓦片文件。每一份瓦片文件中的数据量进一步减少,便于对瓦片数据进行
点云数据提取方法、装置、电子设备及存储介质.pdf
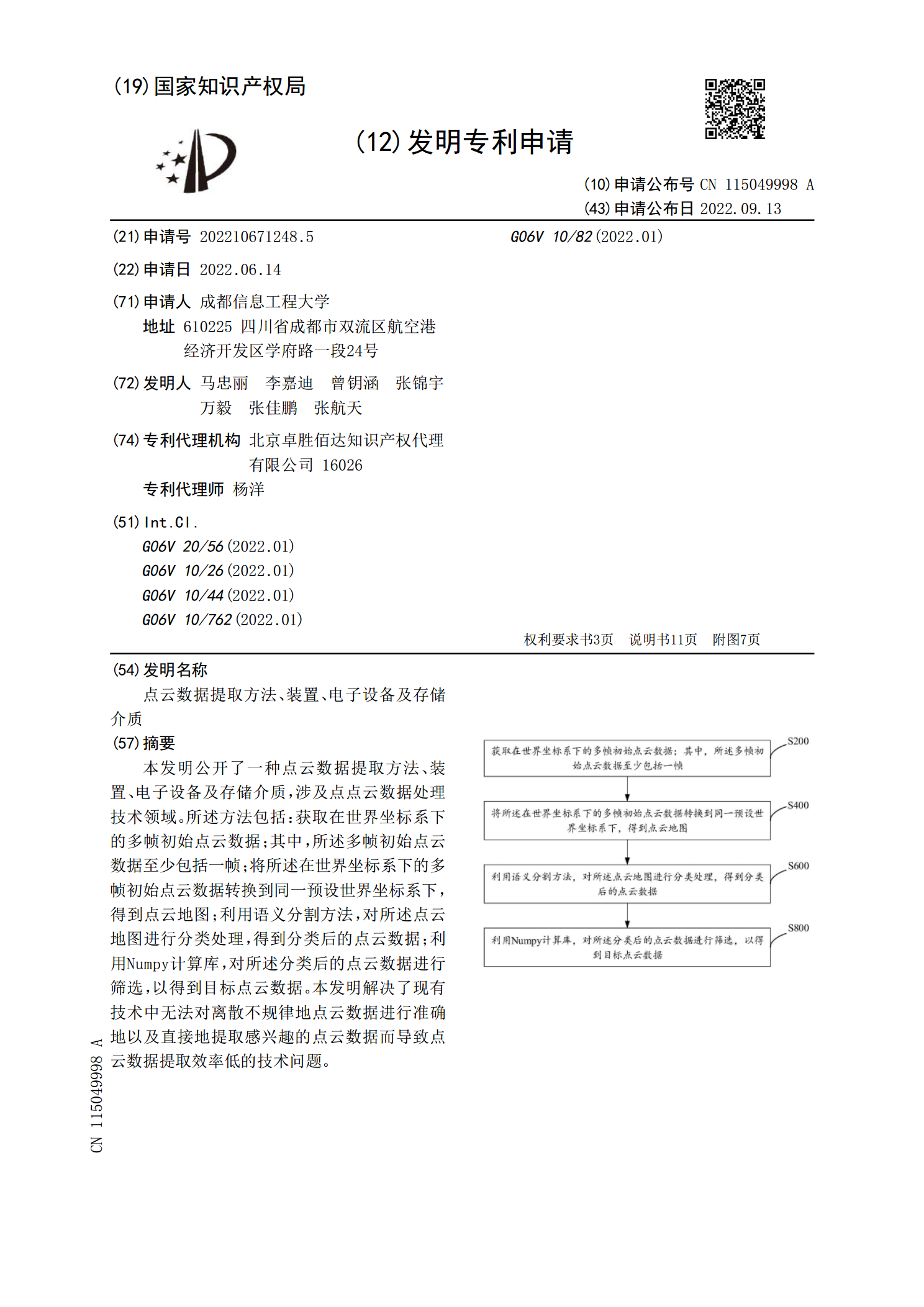
本发明公开了一种点云数据提取方法、装置、电子设备及存储介质,涉及点点云数据处理技术领域。所述方法包括:获取在世界坐标系下的多帧初始点云数据;其中,所述多帧初始点云数据至少包括一帧;将所述在世界坐标系下的多帧初始点云数据转换到同一预设世界坐标系下,得到点云地图;利用语义分割方法,对所述点云地图进行分类处理,得到分类后的点云数据;利用Numpy计算库,对所述分类后的点云数据进行筛选,以得到目标点云数据。本发明解决了现有技术中无法对离散不规律地点云数据进行准确地以及直接地提取感兴趣的点云数据而导致点云数据提取效

点云数据的分类方法、装置、电子设备及存储介质.pdf
本发明公开了一种点云数据的分类方法、装置、电子设备及存储介质,其方法包括:获取激光雷达系统的点云数据,剔除所述点云数据中的无用数据,得到目标点云数据,根据不同角度的坐标体系,对所述目标点云数据进行配准,得到配准后的点云数据,根据支持向量机方法和点云数据的特征信息,分类所述配准后的目标点云数据,得到分类后的点云数据,构建所述分类后的点云数据的3D模型,并将所述3D模型进行展示。本发明通过一种点云数据的分类方法,提高了点云数据的分类准确率。

一种点云数据的处理方法、装置、电子设备及存储介质.pdf
本公开提供了一种点云数据的处理方法、装置、电子设备及存储介质,其中,该方法包括:获取目标场景对应的点云数据;对获取的点云数据分别进行栅格化处理,得到各个栅格对应的点云数据集;同一个栅格内的点云数据集在存储介质中顺序存储;每个所述点云数据集中包含至少一个点云点的数据;根据每个栅格对应的点云数据集,确定与该栅格对应的点云特征信息。本公开将点云特征提取划分为点云栅格化过程和栅格特征提取过程,这样,通过以栅格为单位,对每个栅格对应的点云数据集进行整体点云特征提取,提高了点云特征提取的效率。
一种点云数据的处理方法、装置、电子设备及存储介质.pdf
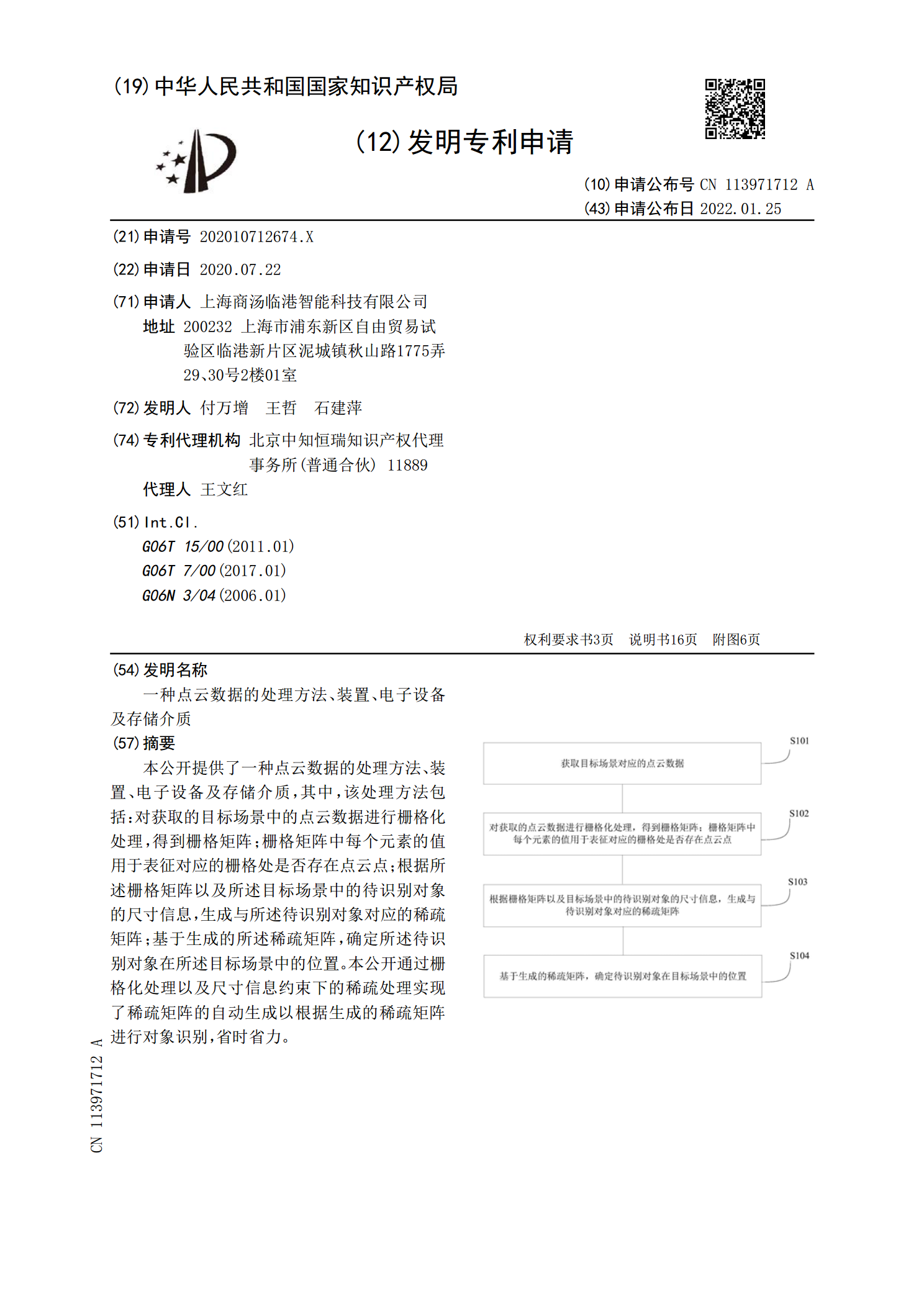
本公开提供了一种点云数据的处理方法、装置、电子设备及存储介质,其中,该处理方法包括:对获取的目标场景中的点云数据进行栅格化处理,得到栅格矩阵;栅格矩阵中每个元素的值用于表征对应的栅格处是否存在点云点;根据所述栅格矩阵以及所述目标场景中的待识别对象的尺寸信息,生成与所述待识别对象对应的稀疏矩阵;基于生成的所述稀疏矩阵,确定所述待识别对象在所述目标场景中的位置。本公开通过栅格化处理以及尺寸信息约束下的稀疏处理实现了稀疏矩阵的自动生成以根据生成的稀疏矩阵进行对象识别,省时省力。