
一种无人机与智能地坪划线机器人协作方法及系统.pdf

宁馨****找我

1/9
2/9
3/9
4/9

5/9

6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种无人机与智能地坪划线机器人协作方法及系统.pdf
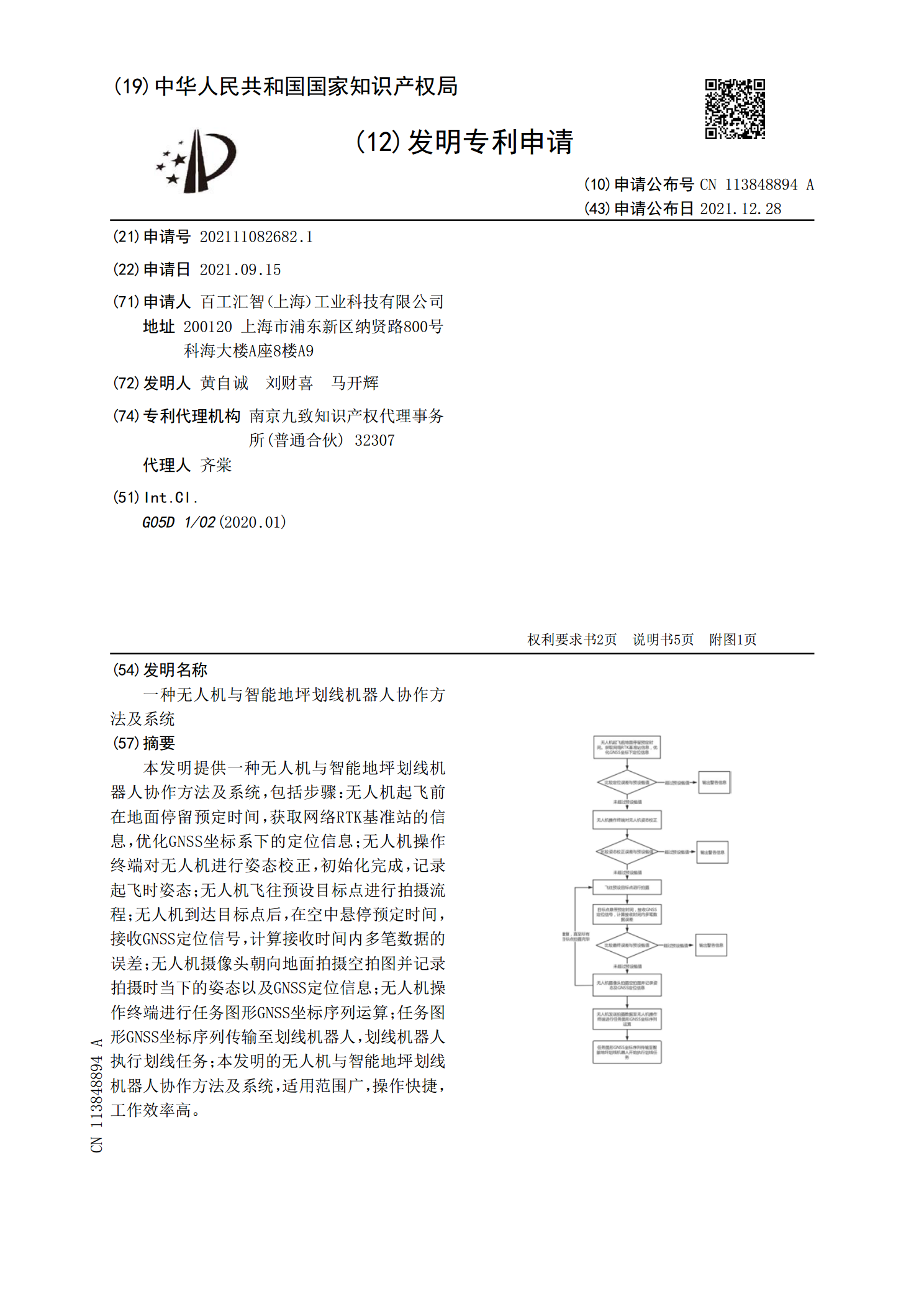
本发明提供一种无人机与智能地坪划线机器人协作方法及系统,包括步骤:无人机起飞前在地面停留预定时间,获取网络RTK基准站的信息,优化GNSS坐标系下的定位信息;无人机操作终端对无人机进行姿态校正,初始化完成,记录起飞时姿态;无人机飞往预设目标点进行拍摄流程;无人机到达目标点后,在空中悬停预定时间,接收GNSS定位信号,计算接收时间内多笔数据的误差;无人机摄像头朝向地面拍摄空拍图并记录拍摄时当下的姿态以及GNSS定位信息;无人机操作终端进行任务图形GNSS坐标序列运算;任务图形GNSS坐标序列传输至划线机器人
一种基于无人机协作的智能道路划线系统及其方法.pdf
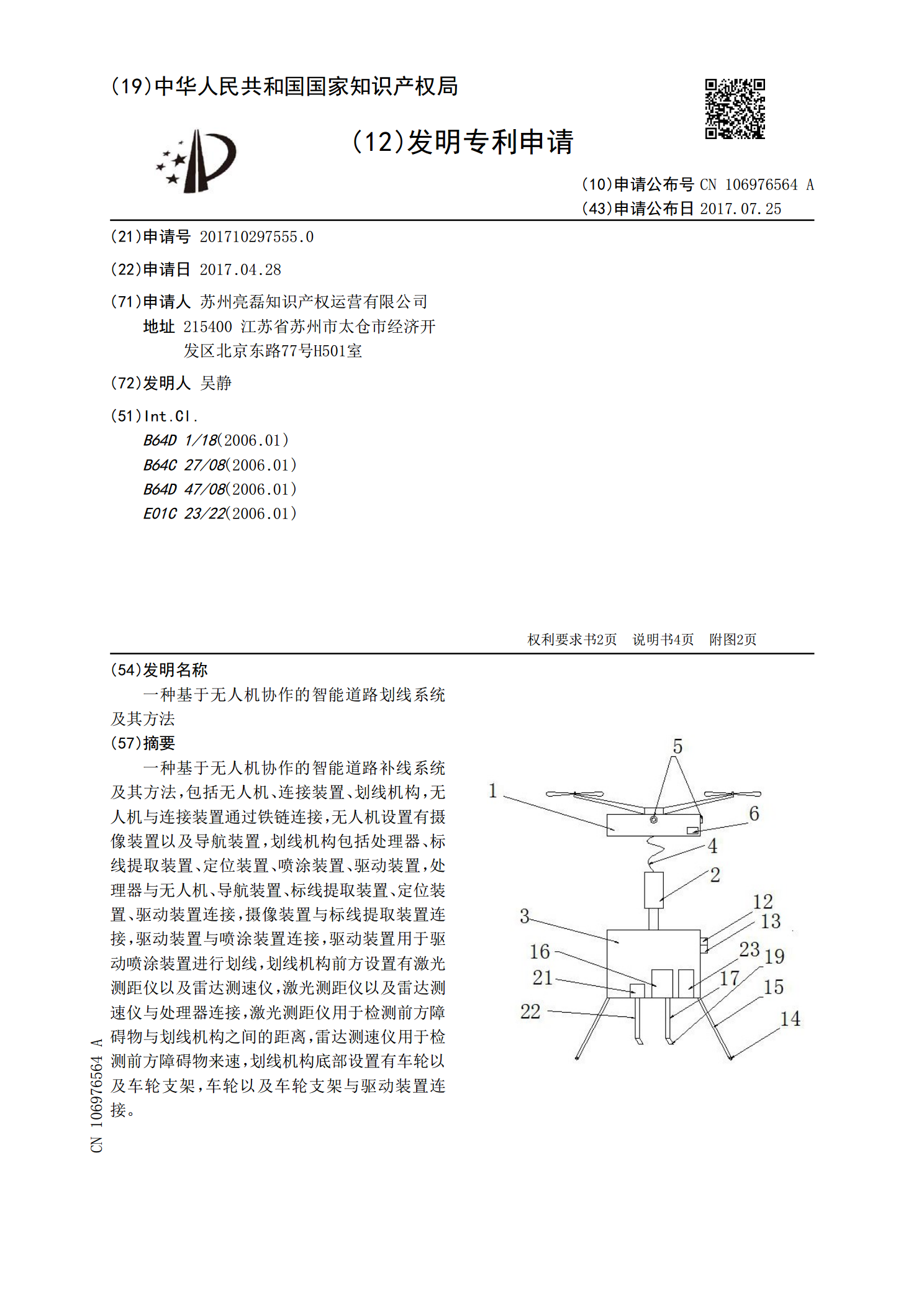
一种基于无人机协作的智能道路补线系统及其方法,包括无人机、连接装置、划线机构,无人机与连接装置通过铁链连接,无人机设置有摄像装置以及导航装置,划线机构包括处理器、标线提取装置、定位装置、喷涂装置、驱动装置,处理器与无人机、导航装置、标线提取装置、定位装置、驱动装置连接,摄像装置与标线提取装置连接,驱动装置与喷涂装置连接,驱动装置用于驱动喷涂装置进行划线,划线机构前方设置有激光测距仪以及雷达测速仪,激光测距仪以及雷达测速仪与处理器连接,激光测距仪用于检测前方障碍物与划线机构之间的距离,雷达测速仪用于检测前方
基于无人机联合协作的智能道路清扫系统及协作方法.pdf
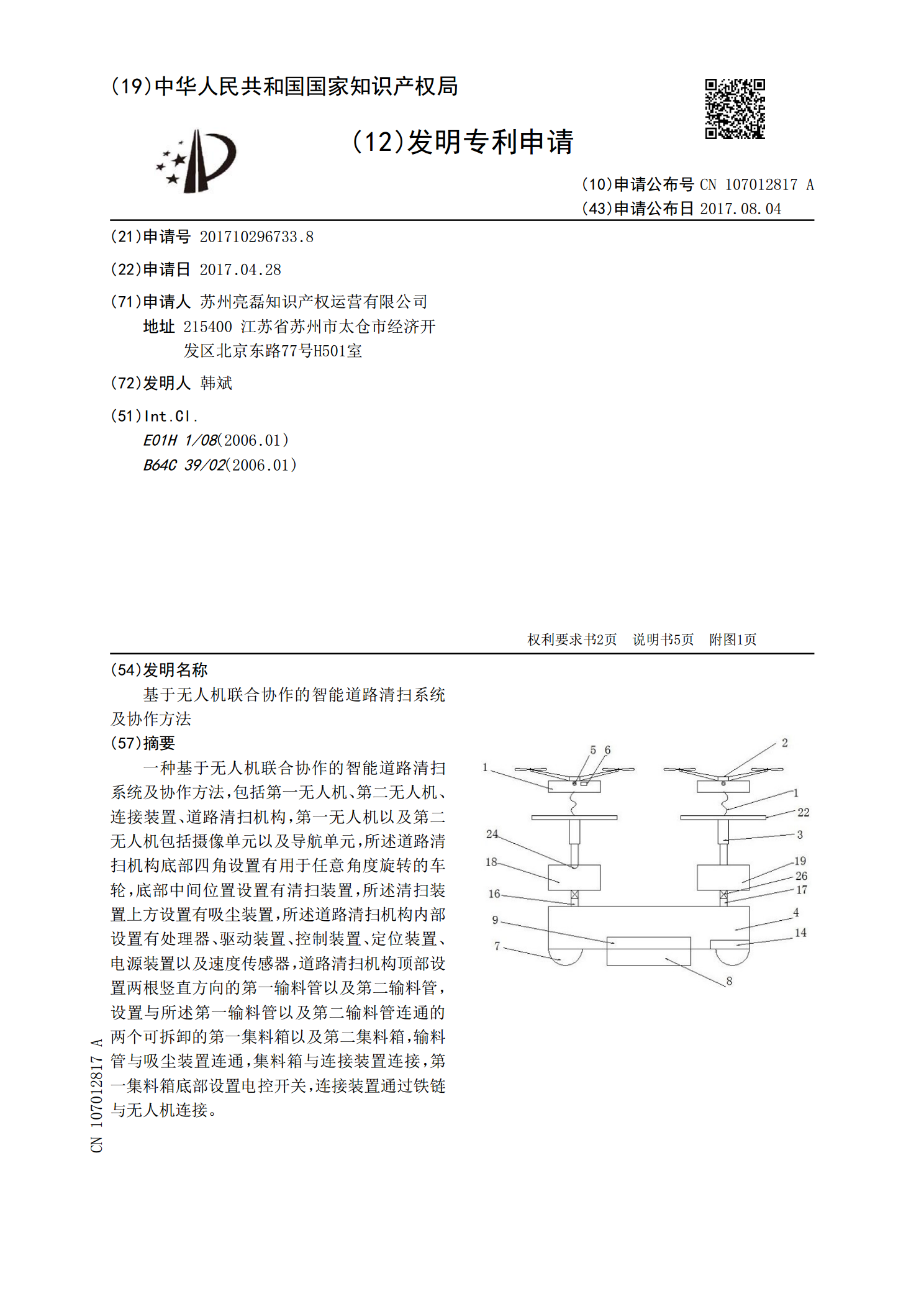
一种基于无人机联合协作的智能道路清扫系统及协作方法,包括第一无人机、第二无人机、连接装置、道路清扫机构,第一无人机以及第二无人机包括摄像单元以及导航单元,所述道路清扫机构底部四角设置有用于任意角度旋转的车轮,底部中间位置设置有清扫装置,所述清扫装置上方设置有吸尘装置,所述道路清扫机构内部设置有处理器、驱动装置、控制装置、定位装置、电源装置以及速度传感器,道路清扫机构顶部设置两根竖直方向的第一输料管以及第二输料管,设置与所述第一输料管以及第二输料管连通的两个可拆卸的第一集料箱以及第二集料箱,输料管与吸尘装置
一种无人机与智能车协作巡逻系统.pdf
本发明公开一种无人机与智能车协作巡逻系统,包括设置在智能车上的管控系统,用于接收和处理无人机返回的监控信息以及智能车获取的监控信息,并进行协同任务分配和处理,将智能车的后备箱设置成停机仓,在所述停机仓内设置可通过平移伸出停机仓的停机板,所述停机板的侧面连接在一油缸的伸出端上,所述油缸水平安装在停机仓内;所述停机板上设置有锁紧组件,用于锁紧无人机支架底部呈水平状态的支撑杆,以实现对无人机的固定。本发明通过针对无人机的出停机仓以及进停机仓的过程,增强无人机与智能车之间的协作性,以更好的提高无人机与智能车协作巡
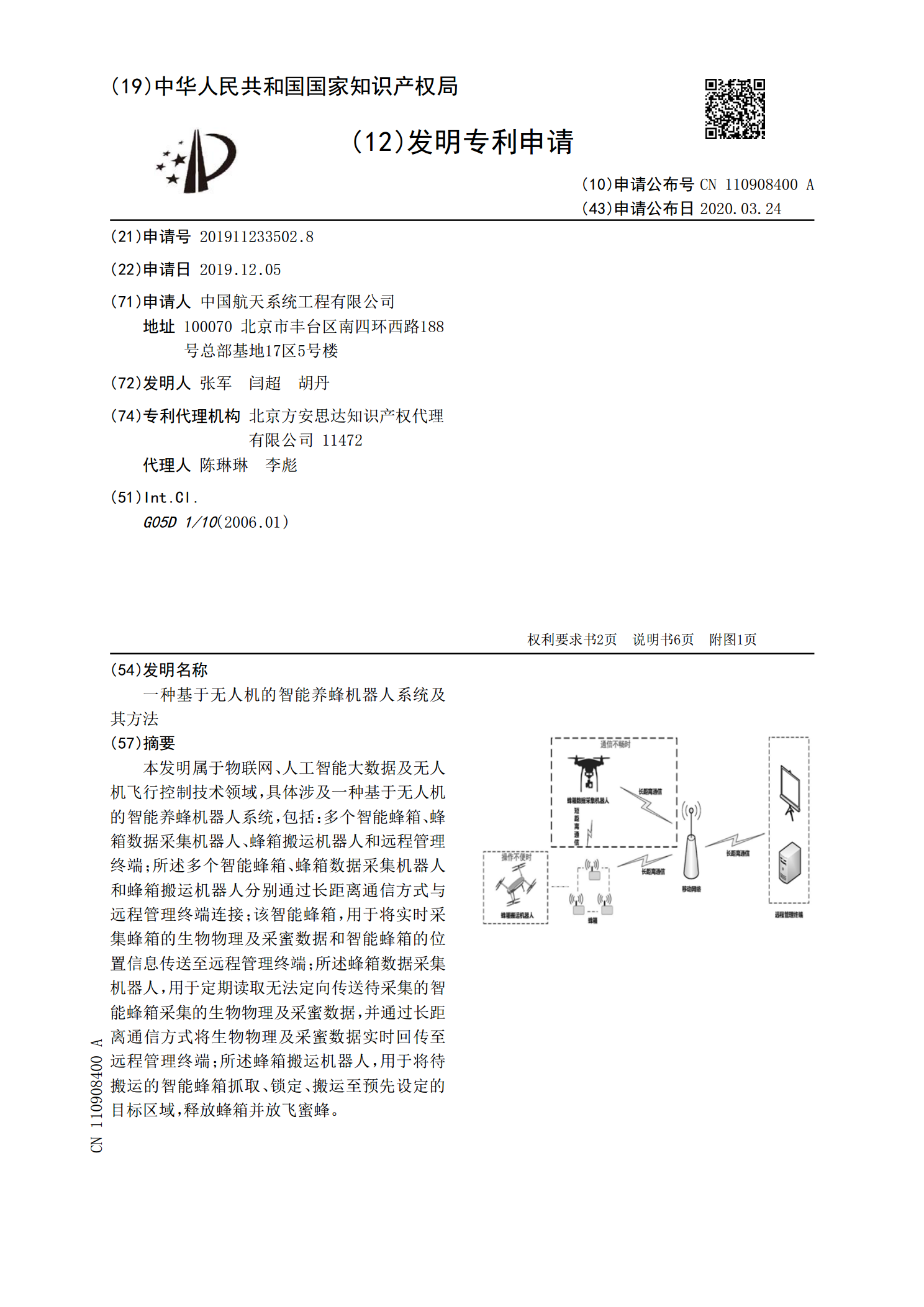
一种基于无人机的智能养蜂机器人系统及其方法.pdf
本发明属于物联网、人工智能大数据及无人机飞行控制技术领域,具体涉及一种基于无人机的智能养蜂机器人系统,包括:多个智能蜂箱、蜂箱数据采集机器人、蜂箱搬运机器人和远程管理终端;所述多个智能蜂箱、蜂箱数据采集机器人和蜂箱搬运机器人分别通过长距离通信方式与远程管理终端连接;该智能蜂箱,用于将实时采集蜂箱的生物物理及采蜜数据和智能蜂箱的位置信息传送至远程管理终端;所述蜂箱数据采集机器人,用于定期读取无法定向传送待采集的智能蜂箱采集的生物物理及采蜜数据,并通过长距离通信方式将生物物理及采蜜数据实时回传至远程管理终端;