
一种无人机与智能车协作巡逻系统.pdf

春波****公主


1/10

2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人机与智能车协作巡逻系统.pdf
本发明公开一种无人机与智能车协作巡逻系统,包括设置在智能车上的管控系统,用于接收和处理无人机返回的监控信息以及智能车获取的监控信息,并进行协同任务分配和处理,将智能车的后备箱设置成停机仓,在所述停机仓内设置可通过平移伸出停机仓的停机板,所述停机板的侧面连接在一油缸的伸出端上,所述油缸水平安装在停机仓内;所述停机板上设置有锁紧组件,用于锁紧无人机支架底部呈水平状态的支撑杆,以实现对无人机的固定。本发明通过针对无人机的出停机仓以及进停机仓的过程,增强无人机与智能车之间的协作性,以更好的提高无人机与智能车协作巡
一种无人车-无人机空地协同巡逻和引导系统.pdf
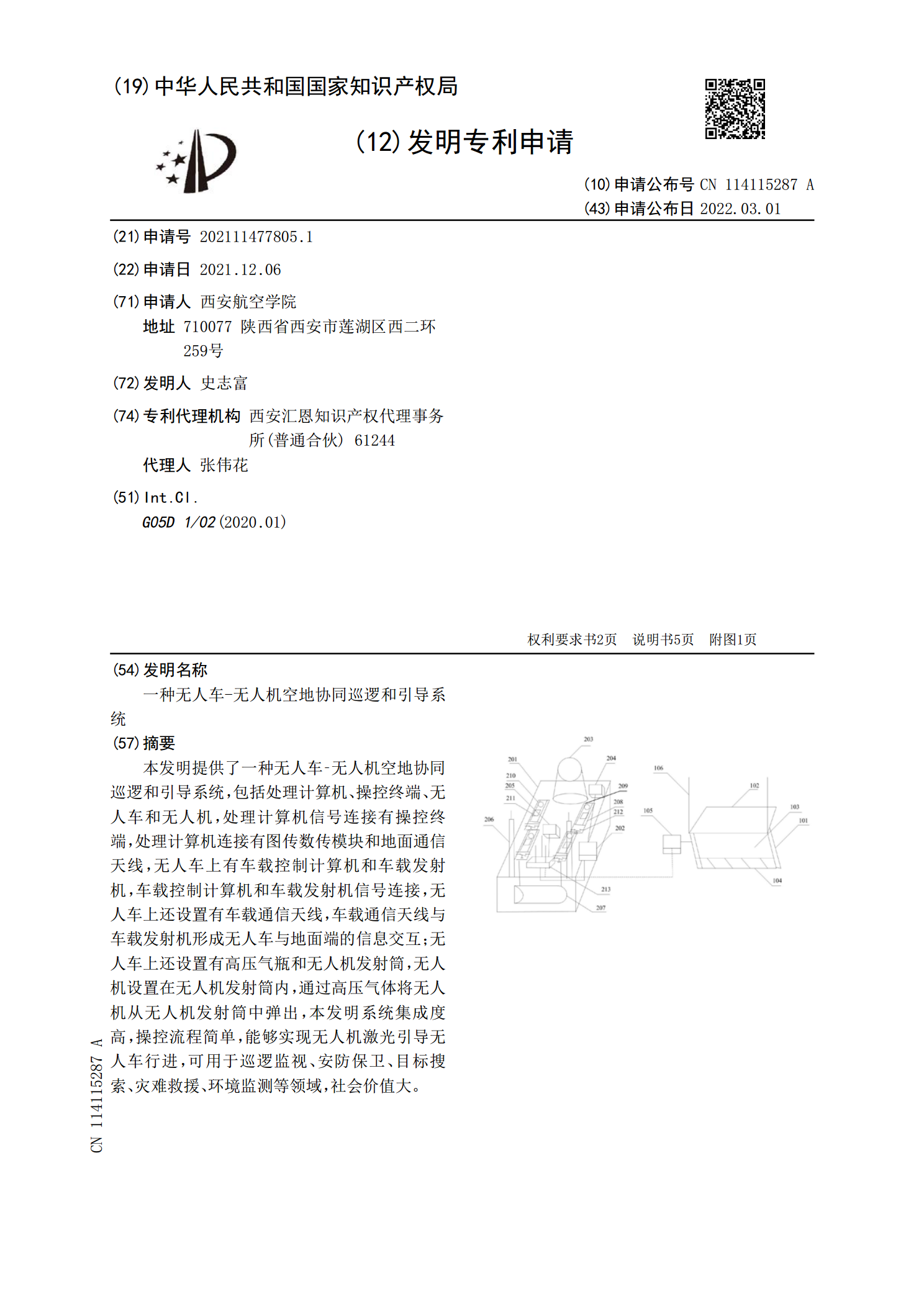
本发明提供了一种无人车‑无人机空地协同巡逻和引导系统,包括处理计算机、操控终端、无人车和无人机,处理计算机信号连接有操控终端,处理计算机连接有图传数传模块和地面通信天线,无人车上有车载控制计算机和车载发射机,车载控制计算机和车载发射机信号连接,无人车上还设置有车载通信天线,车载通信天线与车载发射机形成无人车与地面端的信息交互;无人车上还设置有高压气瓶和无人机发射筒,无人机设置在无人机发射筒内,通过高压气体将无人机从无人机发射筒中弹出,本发明系统集成度高,操控流程简单,能够实现无人机激光引导无人车行进,可用
一种智能庭院巡逻车.pdf
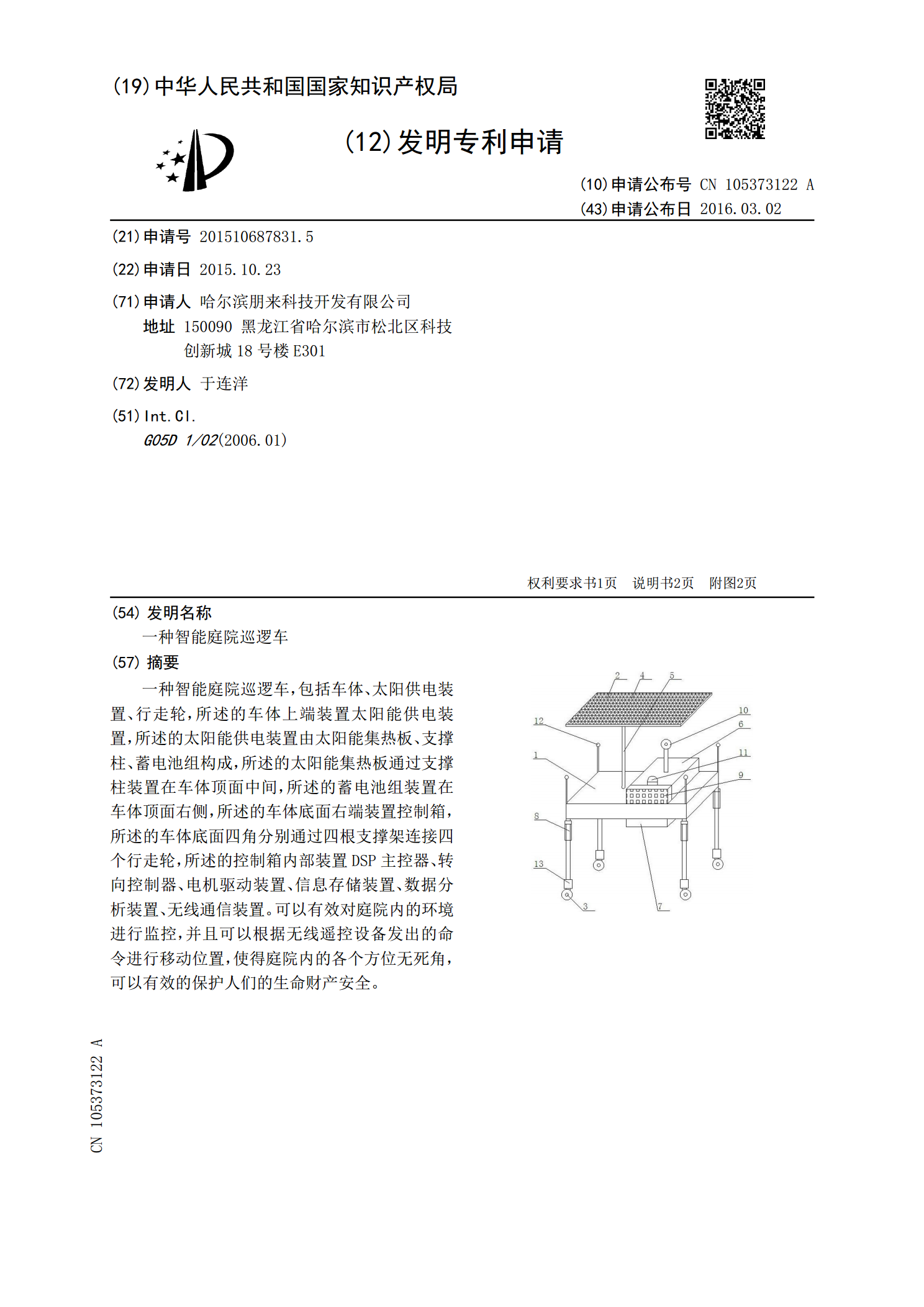
一种智能庭院巡逻车,包括车体、太阳供电装置、行走轮,所述的车体上端装置太阳能供电装置,所述的太阳能供电装置由太阳能集热板、支撑柱、蓄电池组构成,所述的太阳能集热板通过支撑柱装置在车体顶面中间,所述的蓄电池组装置在车体顶面右侧,所述的车体底面右端装置控制箱,所述的车体底面四角分别通过四根支撑架连接四个行走轮,所述的控制箱内部装置DSP主控器、转向控制器、电机驱动装置、信息存储装置、数据分析装置、无线通信装置。可以有效对庭院内的环境进行监控,并且可以根据无线遥控设备发出的命令进行移动位置,使得庭院内的各个方位
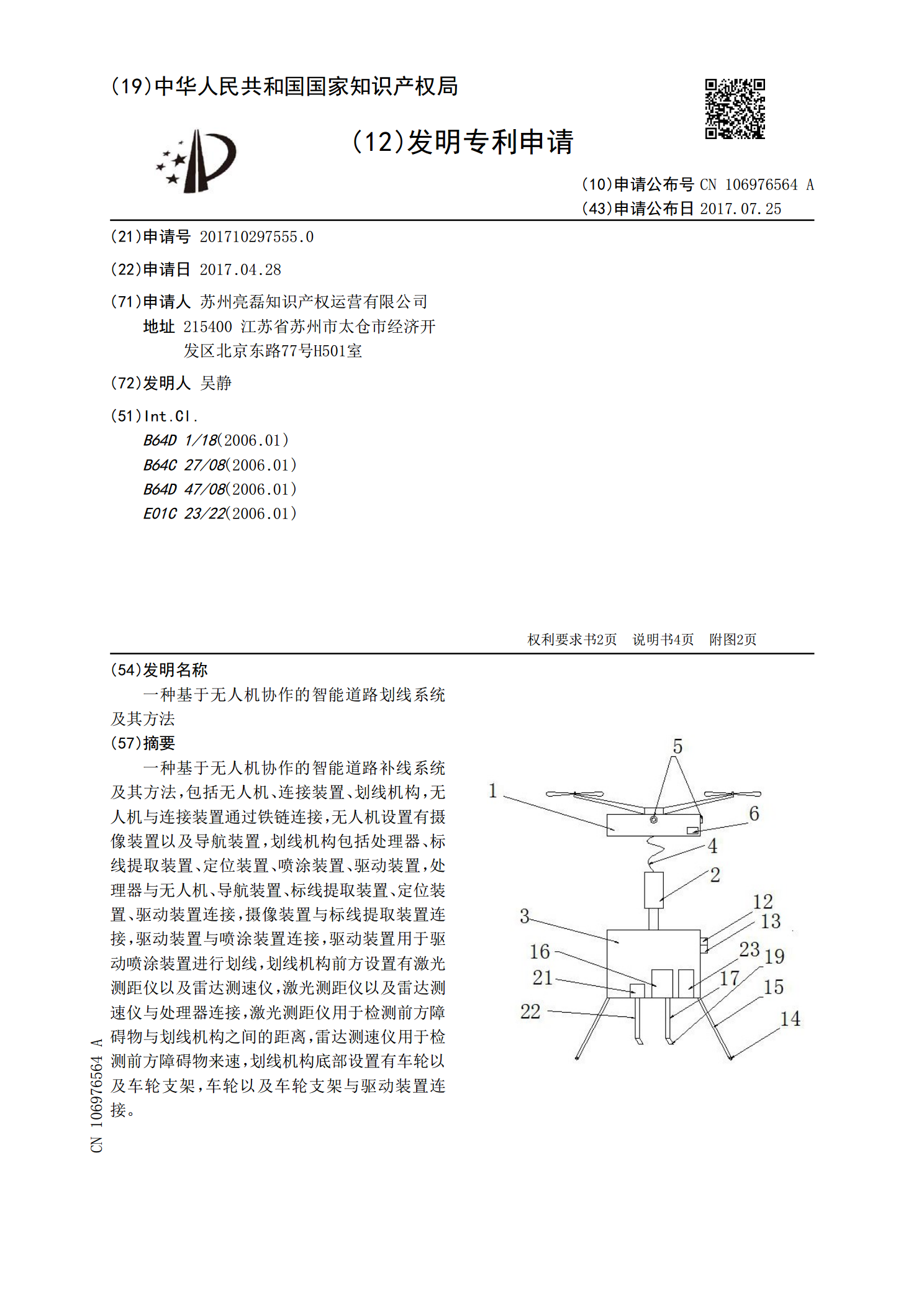
一种基于无人机协作的智能道路划线系统及其方法.pdf
一种基于无人机协作的智能道路补线系统及其方法,包括无人机、连接装置、划线机构,无人机与连接装置通过铁链连接,无人机设置有摄像装置以及导航装置,划线机构包括处理器、标线提取装置、定位装置、喷涂装置、驱动装置,处理器与无人机、导航装置、标线提取装置、定位装置、驱动装置连接,摄像装置与标线提取装置连接,驱动装置与喷涂装置连接,驱动装置用于驱动喷涂装置进行划线,划线机构前方设置有激光测距仪以及雷达测速仪,激光测距仪以及雷达测速仪与处理器连接,激光测距仪用于检测前方障碍物与划线机构之间的距离,雷达测速仪用于检测前方
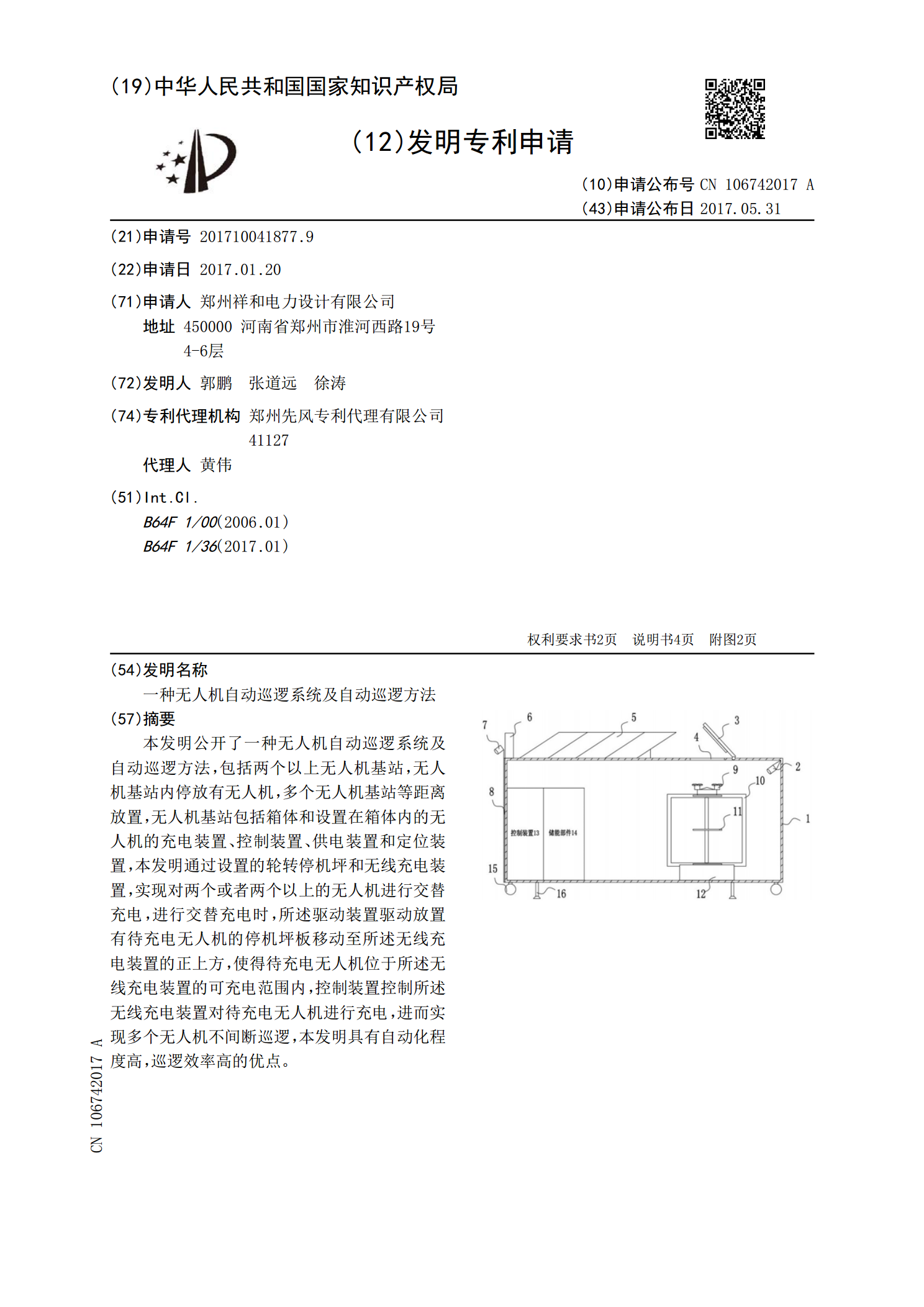
一种无人机自动巡逻系统及自动巡逻方法.pdf
本发明公开了一种无人机自动巡逻系统及自动巡逻方法,包括两个以上无人机基站,无人机基站内停放有无人机,多个无人机基站等距离放置,无人机基站包括箱体和设置在箱体内的无人机的充电装置、控制装置、供电装置和定位装置,本发明通过设置的轮转停机坪和无线充电装置,实现对两个或者两个以上的无人机进行交替充电,进行交替充电时,所述驱动装置驱动放置有待充电无人机的停机坪板移动至所述无线充电装置的正上方,使得待充电无人机位于所述无线充电装置的可充电范围内,控制装置控制所述无线充电装置对待充电无人机进行充电,进而实现多个无人机不