
基于激光视觉的化肥装车系统及方法.pdf

努力****元恺

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于激光视觉的化肥装车系统及方法.pdf
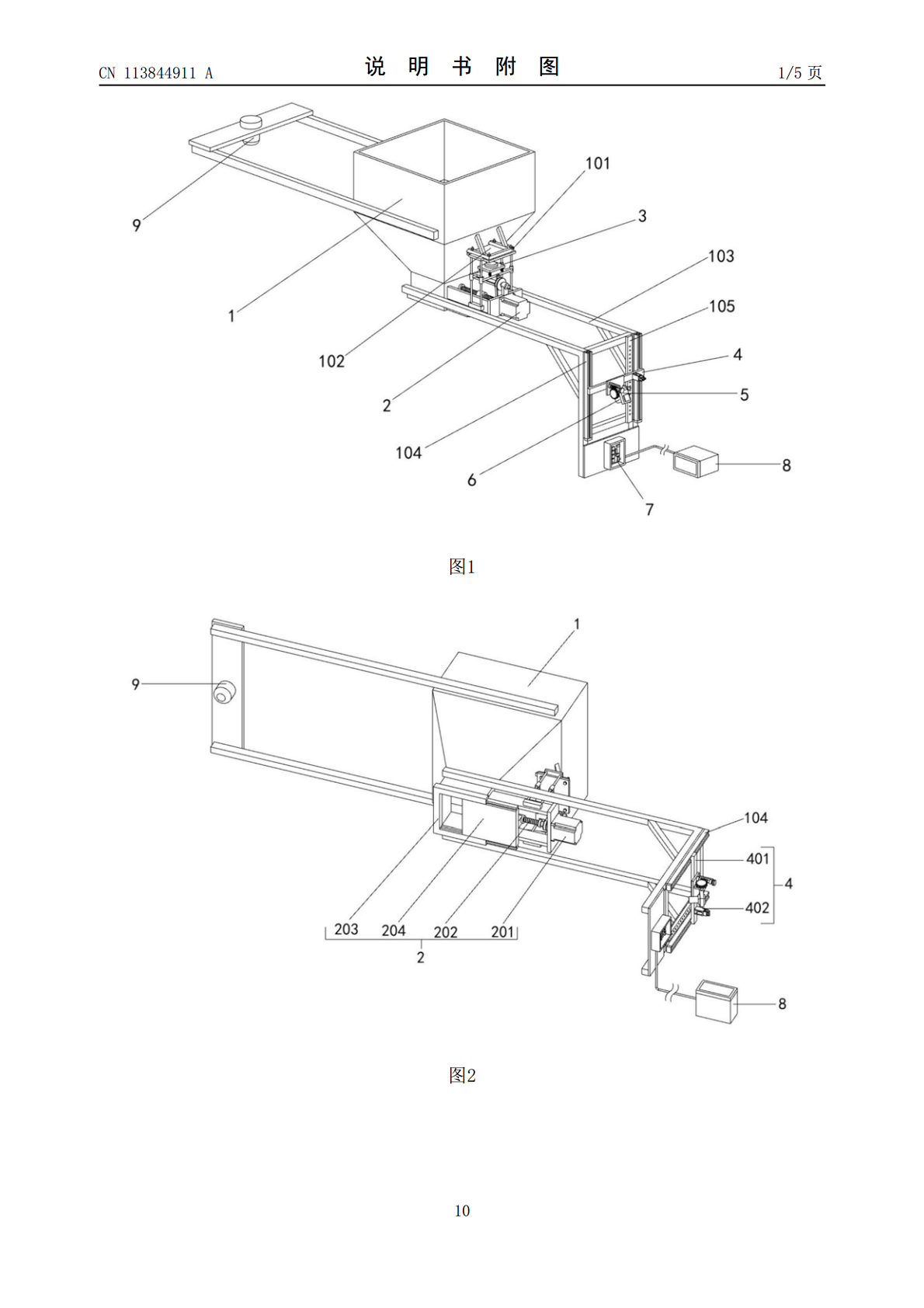
本发明提供基于激光视觉的化肥装车系统及方法,属于化肥装车技术领域,以解决目前的装车装置装料时,由于需要司机全程盯着料车车斗内的化肥盛放量情况,从而使得整个装车过程中费时费力,且装车漏斗漏料量不可灵活调控的问题,包括:装车漏斗;所述装车漏斗底部设有流量调节装置,且流量调节装置上部位于装车漏斗前侧设有敲击机构,装车漏斗前侧下部设有高度调节组件;所述角度调节组件上安装有2D相机。本发明通过2D相机、图像采集卡和工业计算机的配合,使装车漏斗的下料量得到实时控制,从而使得整个装料过程,司机无需全程盯着料车车斗内的化

基于激光视觉系统的苹果空间定位方法.docx
基于激光视觉系统的苹果空间定位方法基于激光视觉系统的苹果空间定位方法摘要:随着农业自动化的快速发展,农作物的精确定位和跟踪成为关键的技术问题。本论文提出了一种基于激光视觉系统的苹果空间定位方法,旨在实现对苹果在三维空间中的准确定位和跟踪。该方法利用激光测距技术和图像处理算法,结合苹果的特征信息,实现了对苹果的快速、精确、非接触式的定位。关键词:激光视觉系统;苹果空间定位;激光测距技术;图像处理算法;特征信息1.引言苹果是世界上最为重要的水果之一,其种植和收获过程对定位和跟踪技术的要求日益增加。传统的人工定

一种基于单目视觉的砂石骨料装车视觉系统及其控制方法.pdf
本发明公开了一种基于单目视觉的砂石骨料装车视觉系统及其控制方法,包括视觉模块、系统控制模块、系统执行模块、实时图像分析模块和视觉反馈控制模块。本发明利用实时图像分析方法,通过工业相机在图像中检测出卸料口下方一定范围内的料堆轮廓线,结合视觉系统标定结果得到与目标料位的实际偏差,再根据一定的控制律计算出消除该偏差所需的卸料闸门开度,并据此对卸料闸门的开度进行实时调节。通过本发明提供的装车系统和方法能够取得更高的作业效率,在尽可能短的时间内实现平稳装车,同时避免随着车厢料位越来越高或剩余容积越来越小导致的撒料情

一种基于视觉的全自动港口吊装车系统及控制方法.pdf
本发明公开了一种基于视觉的全自动港口吊装车系统及控制方法,包括吊装车和行道,所述吊装车包括控制器、底部的轮子和位于底部的识别器,所述识别器采集口向下设置,所述行道包括两条白线和设置在白线边上的二维码,所述识别器采集白线和二维码的信息并传输给控制器,所述控制器依据识别器采集的信息控制吊装车的运动轨迹和启停,所述吊装车上部设有平台,平台的下表面设有采集装货区域图像的摄像头。采用本发明的技术方案,可以实现全自动码头货车的行驶吊货装货操作,节约了人力物力,并且精度高,操作及时准确。

一种基于激光视觉剔除不良工件的方法及系统.pdf
本发明公开了一种基于激光视觉剔除不良工件的方法及系统,其方法包括:向沿着标定板输送的若干个被测工件进行在线激光视觉检测,并获取若干个被测工件中每一被测工件的平整度信息;根据每一被测工件的平整度信息为被测工件进行打码标识处理,生成被测工件的二维码信息;剔除机构识别每一被测工件的二维码信息,并根据二维码信息中的剔除指令判断每一被测工件是否进行剔除操作;在判断被测工件满足剔除操作时,将不满足平整度要求的被测工件从所述标定板的传送带剔除出去。本发明采用激光扫描三角测量方法进行3D图像数据采集及空间模型构建,找到符