
一种基于激光视觉剔除不良工件的方法及系统.pdf

明轩****la


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于激光视觉剔除不良工件的方法及系统.pdf
本发明公开了一种基于激光视觉剔除不良工件的方法及系统,其方法包括:向沿着标定板输送的若干个被测工件进行在线激光视觉检测,并获取若干个被测工件中每一被测工件的平整度信息;根据每一被测工件的平整度信息为被测工件进行打码标识处理,生成被测工件的二维码信息;剔除机构识别每一被测工件的二维码信息,并根据二维码信息中的剔除指令判断每一被测工件是否进行剔除操作;在判断被测工件满足剔除操作时,将不满足平整度要求的被测工件从所述标定板的传送带剔除出去。本发明采用激光扫描三角测量方法进行3D图像数据采集及空间模型构建,找到符
一种基于线激光双目立体视觉的工件抓取方法.pdf
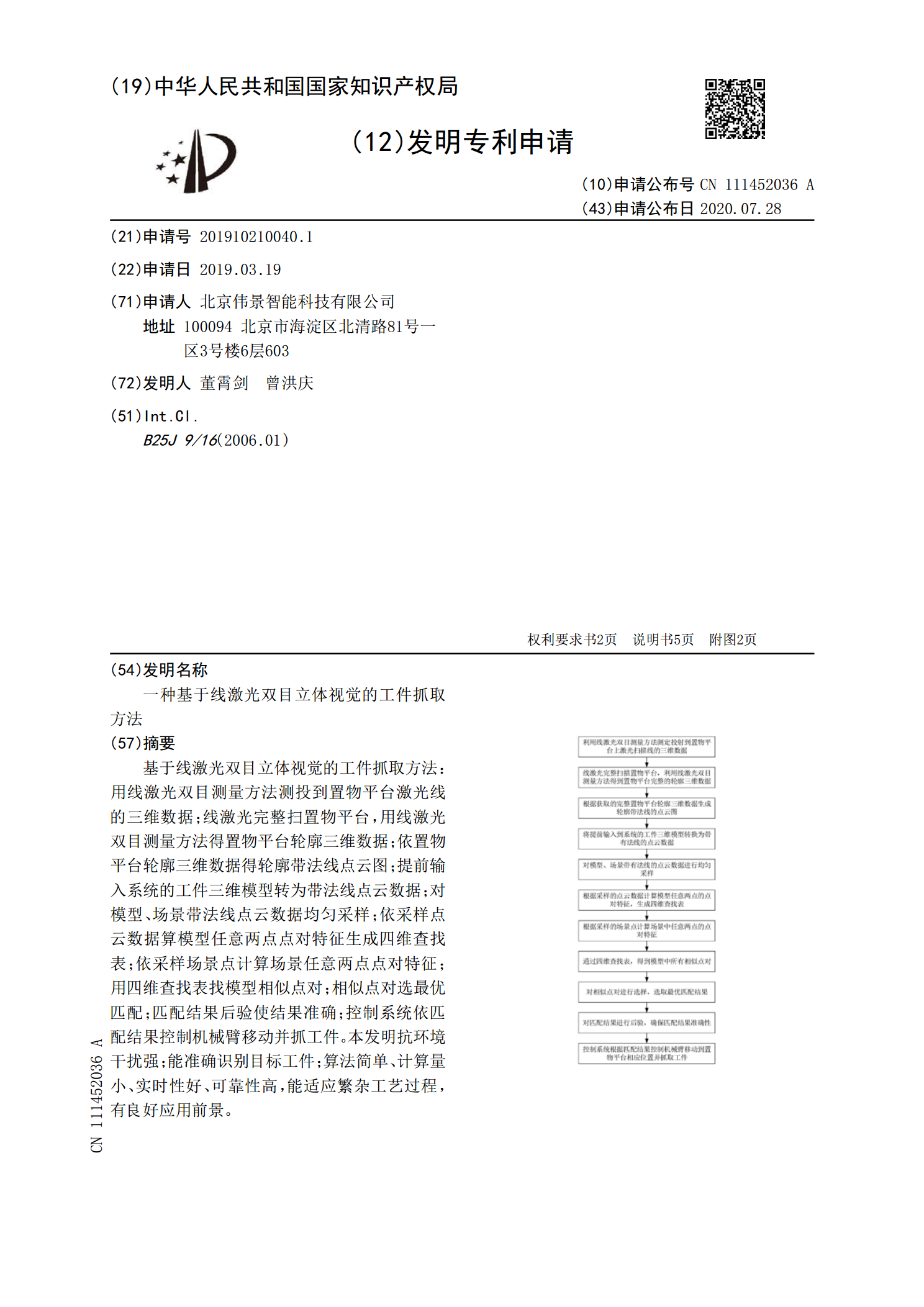
基于线激光双目立体视觉的工件抓取方法:用线激光双目测量方法测投到置物平台激光线的三维数据;线激光完整扫置物平台,用线激光双目测量方法得置物平台轮廓三维数据;依置物平台轮廓三维数据得轮廓带法线点云图;提前输入系统的工件三维模型转为带法线点云数据;对模型、场景带法线点云数据均匀采样;依采样点云数据算模型任意两点点对特征生成四维查找表;依采样场景点计算场景任意两点点对特征;用四维查找表找模型相似点对;相似点对选最优匹配;匹配结果后验使结果准确;控制系统依匹配结果控制机械臂移动并抓工件。本发明抗环境干扰强;能准确

基于激光视觉的化肥装车系统及方法.pdf
本发明提供基于激光视觉的化肥装车系统及方法,属于化肥装车技术领域,以解决目前的装车装置装料时,由于需要司机全程盯着料车车斗内的化肥盛放量情况,从而使得整个装车过程中费时费力,且装车漏斗漏料量不可灵活调控的问题,包括:装车漏斗;所述装车漏斗底部设有流量调节装置,且流量调节装置上部位于装车漏斗前侧设有敲击机构,装车漏斗前侧下部设有高度调节组件;所述角度调节组件上安装有2D相机。本发明通过2D相机、图像采集卡和工业计算机的配合,使装车漏斗的下料量得到实时控制,从而使得整个装料过程,司机无需全程盯着料车车斗内的化
一种基于机器视觉的工件检测方法及系统.pdf
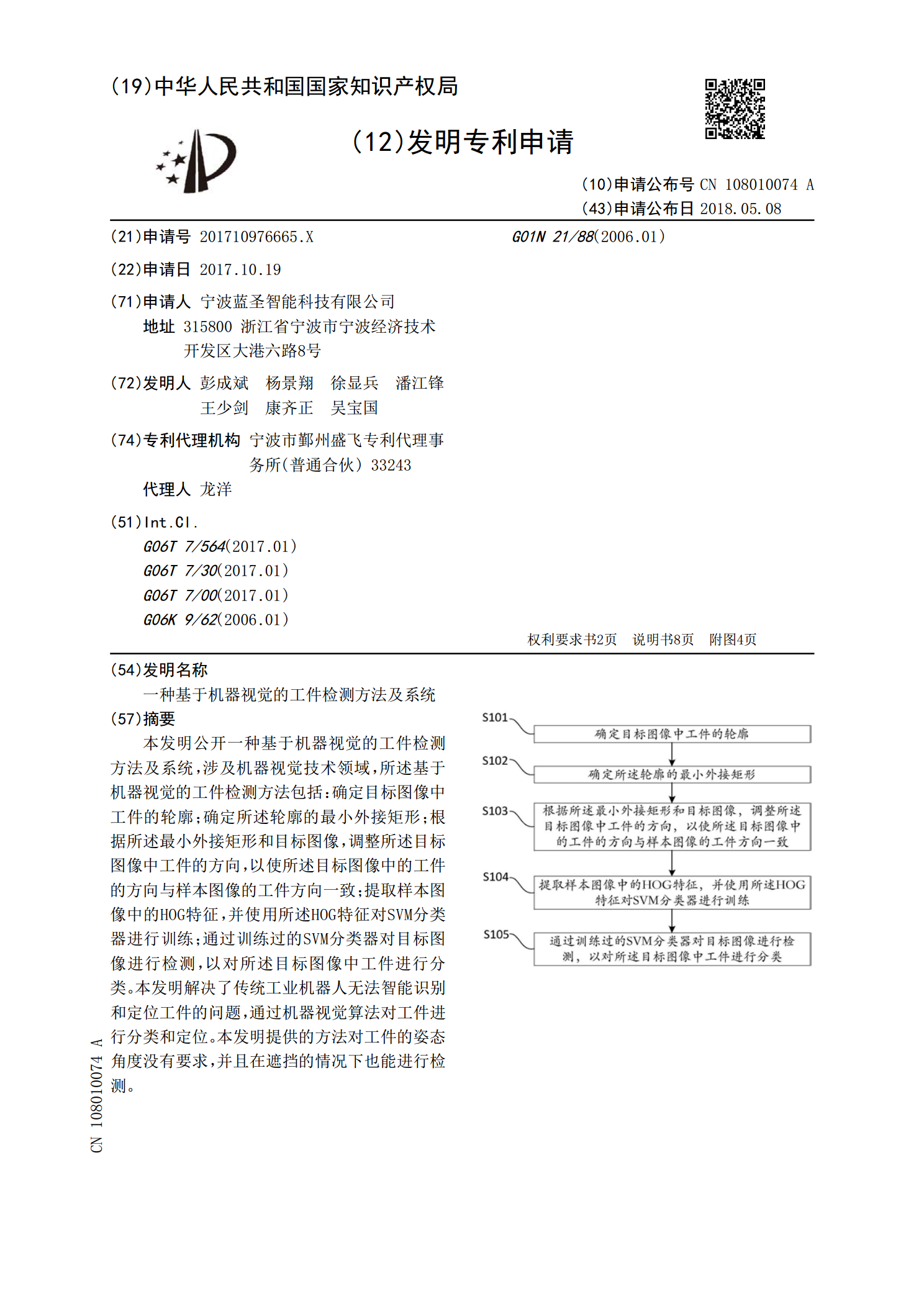
本发明公开一种基于机器视觉的工件检测方法及系统,涉及机器视觉技术领域,所述基于机器视觉的工件检测方法包括:确定目标图像中工件的轮廓;确定所述轮廓的最小外接矩形;根据所述最小外接矩形和目标图像,调整所述目标图像中工件的方向,以使所述目标图像中的工件的方向与样本图像的工件方向一致;提取样本图像中的HOG特征,并使用所述HOG特征对SVM分类器进行训练;通过训练过的SVM分类器对目标图像进行检测,以对所述目标图像中工件进行分类。本发明解决了传统工业机器人无法智能识别和定位工件的问题,通过机器视觉算法对工件进行分
一种基于视觉特性的盲元剔除方法.pdf
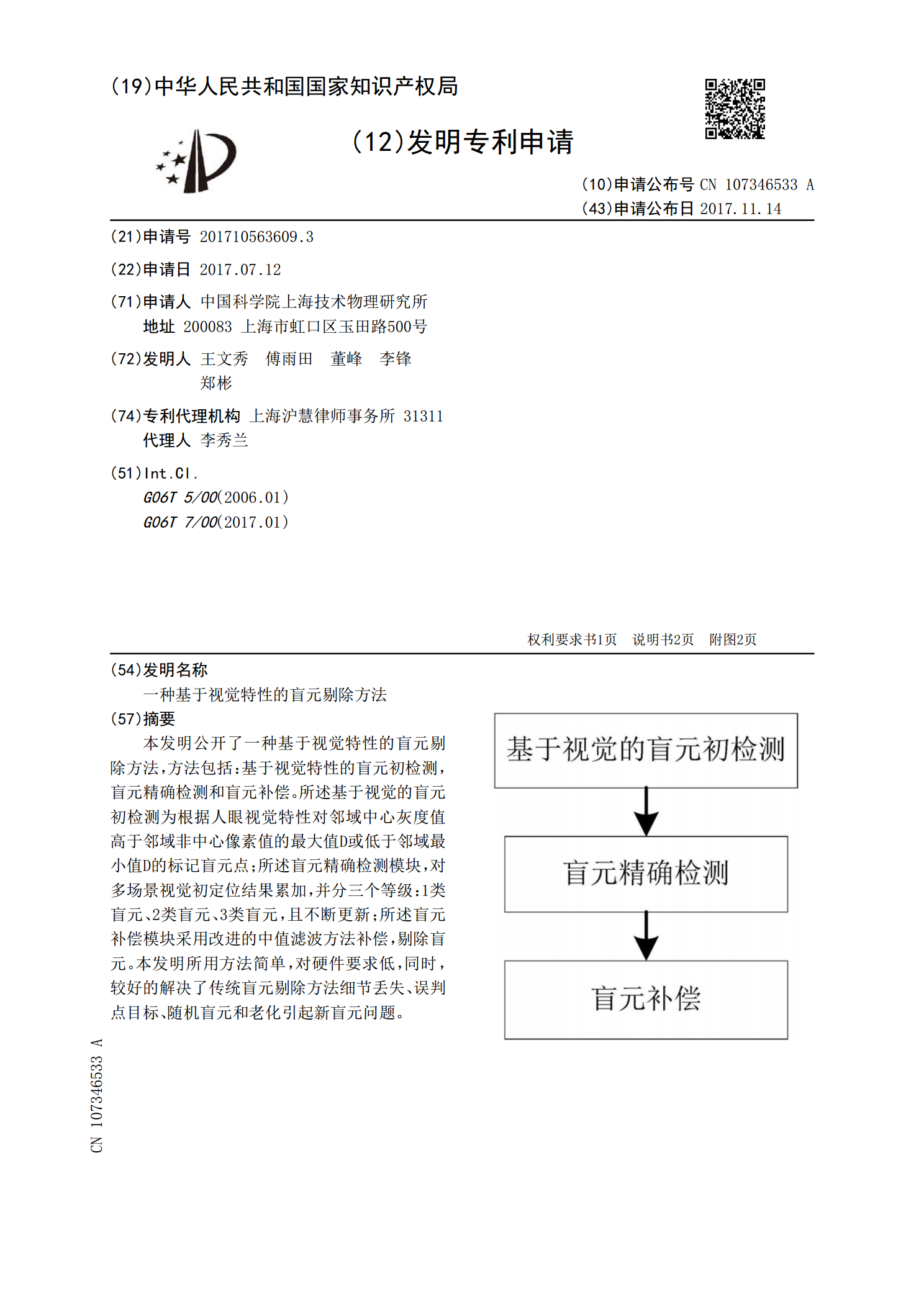
本发明公开了一种基于视觉特性的盲元剔除方法,方法包括:基于视觉特性的盲元初检测,盲元精确检测和盲元补偿。所述基于视觉的盲元初检测为根据人眼视觉特性对邻域中心灰度值高于邻域非中心像素值的最大值D或低于邻域最小值D的标记盲元点;所述盲元精确检测模块,对多场景视觉初定位结果累加,并分三个等级:1类盲元、2类盲元、3类盲元,且不断更新;所述盲元补偿模块采用改进的中值滤波方法补偿,剔除盲元。本发明所用方法简单,对硬件要求低,同时,较好的解决了传统盲元剔除方法细节丢失、误判点目标、随机盲元和老化引起新盲元问题。