
用于控制超起装置的方法、控制器、装置及工程机械.pdf

山柳****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于控制超起装置的方法、控制器、装置及工程机械.pdf
本发明公开了一种用于控制超起装置的方法、控制器、装置及工程机械。本发明应用于应用于包含吊臂、超起装置、超起油路、设置在吊臂与超起装置之间的钢丝绳的工程机械,通过确定所述钢丝绳的实际张力及目标张力;确定所述吊臂的伸缩状态;在确定所述伸缩状态为缩臂的情况下,以设定速度控制所述超起装置持续收绳;根据所述实际张力和所述目标张力调节所述超起油路的压力。其中,根据超起装置在缩臂且以设定速度收绳时,钢丝绳处于绷直状态,钢丝绳的张力取决于超起油路的压力的特点,通过控制超起油路的压力实现钢丝绳的张力的控制,提高了控制的精度

超起装置控制设备、方法、系统及工程机械.pdf
本发明涉及一种超起装置控制设备、方法、系统及工程机械。该超起装置包括超起桅杆、超起卷扬、以及锁紧装置,从所述超起卷扬引出的钢丝绳经过设置于臂架系统上的臂架滑轮装置引回所述超起桅杆,该控制设备包括:接收装置,用于接收第一测量装置所测量的所述钢丝绳从所述超起卷扬伸出的长度以及第二测量装置所测量的所述钢丝绳从所述超起卷扬伸出的长度;以及控制装置,用于在所述第一测量装置所测量的所述钢丝绳从所述超起卷扬伸出的长度在所述预设绳长范围内并且所述第二测量装置所测量的所述钢丝绳从所述超起卷扬伸出的长度在所述预设绳长范围内的
用于工程机械的装置及通信方法、控制器和工程机械.pdf
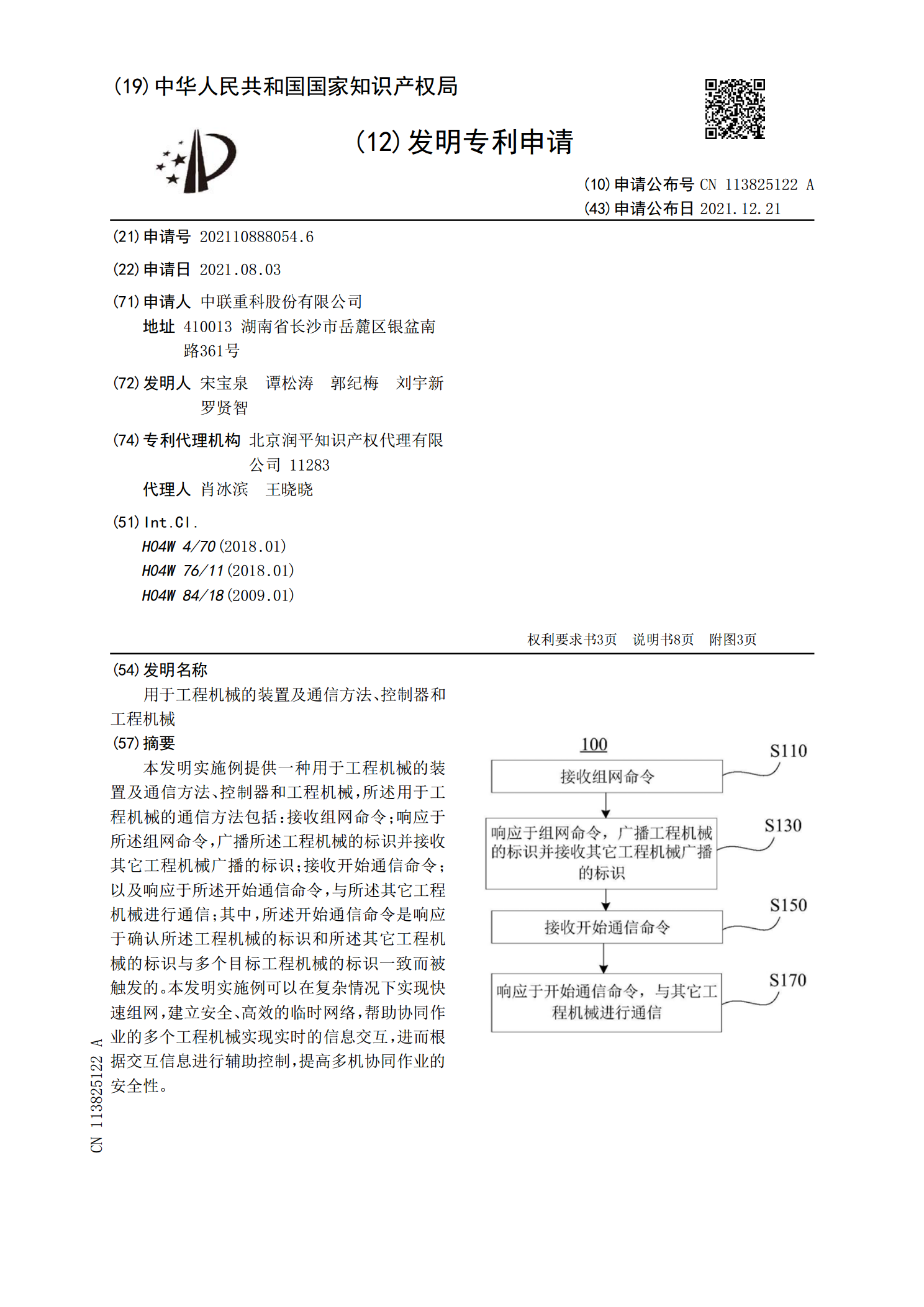
本发明实施例提供一种用于工程机械的装置及通信方法、控制器和工程机械,所述用于工程机械的通信方法包括:接收组网命令;响应于所述组网命令,广播所述工程机械的标识并接收其它工程机械广播的标识;接收开始通信命令;以及响应于所述开始通信命令,与所述其它工程机械进行通信;其中,所述开始通信命令是响应于确认所述工程机械的标识和所述其它工程机械的标识与多个目标工程机械的标识一致而被触发的。本发明实施例可以在复杂情况下实现快速组网,建立安全、高效的临时网络,帮助协同作业的多个工程机械实现实时的信息交互,进而根据交互信息进行

超起装置绳长控制设备、方法、系统及工程机械.pdf
本发明涉及一种超起装置绳长控制设备、方法、系统及工程机械。该超起装置包括超起桅杆、超起卷扬、以及补偿机构,从所述超起卷扬引出的钢丝绳经过设置于臂架系统上的臂架滑轮装置引回所述超起桅杆,并与所述补偿机构相连,该控制设备包括:接收装置,用于接收所述钢丝绳的长度;以及控制装置,用于比较所述钢丝绳的长度与预设绳长,得到比较结果,并根据所述比较结果控制所述补偿机构主动回缩,所述超起卷扬被动放绳,或控制所述超起卷扬主动收绳,所述补偿机构被动伸出。本发明可以通过超起卷扬和/或补偿油缸控制钢丝绳的长度。
控制超起卷扬的方法、装置及超起卷扬控制系统.pdf
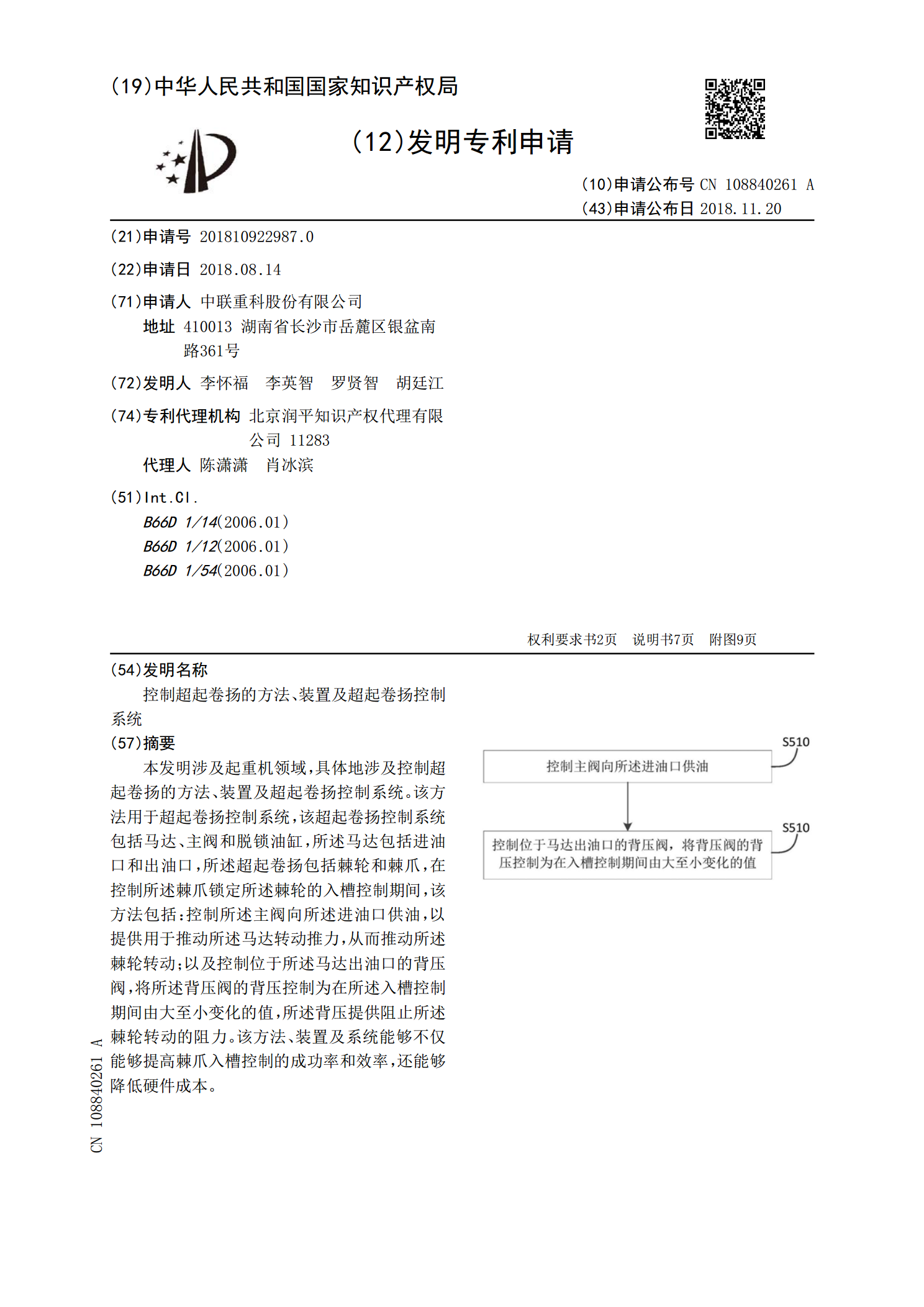
本发明涉及起重机领域,具体地涉及控制超起卷扬的方法、装置及超起卷扬控制系统。该方法用于超起卷扬控制系统,该超起卷扬控制系统包括马达、主阀和脱锁油缸,所述马达包括进油口和出油口,所述超起卷扬包括棘轮和棘爪,在控制所述棘爪锁定所述棘轮的入槽控制期间,该方法包括:控制所述主阀向所述进油口供油,以提供用于推动所述马达转动推力,从而推动所述棘轮转动;以及控制位于所述马达出油口的背压阀,将所述背压阀的背压控制为在所述入槽控制期间由大至小变化的值,所述背压提供阻止所述棘轮转动的阻力。该方法、装置及系统能够不仅能够提高棘