
激光雷达点云目标检测方法、系统及装置.pdf

曾琪****是我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

激光雷达点云目标检测方法、系统及装置.pdf
本发明公开了一种激光雷达点云目标检测方法,对点云信息构建前视图栅格,分别对前视图栅格提取特征以及对每一个前视图栅格内最近点提取点特征并结合,再通过三维目标检测器检测障碍物。本发明对高分辨率点云信息能够有好的保留,使得检测性能更好。
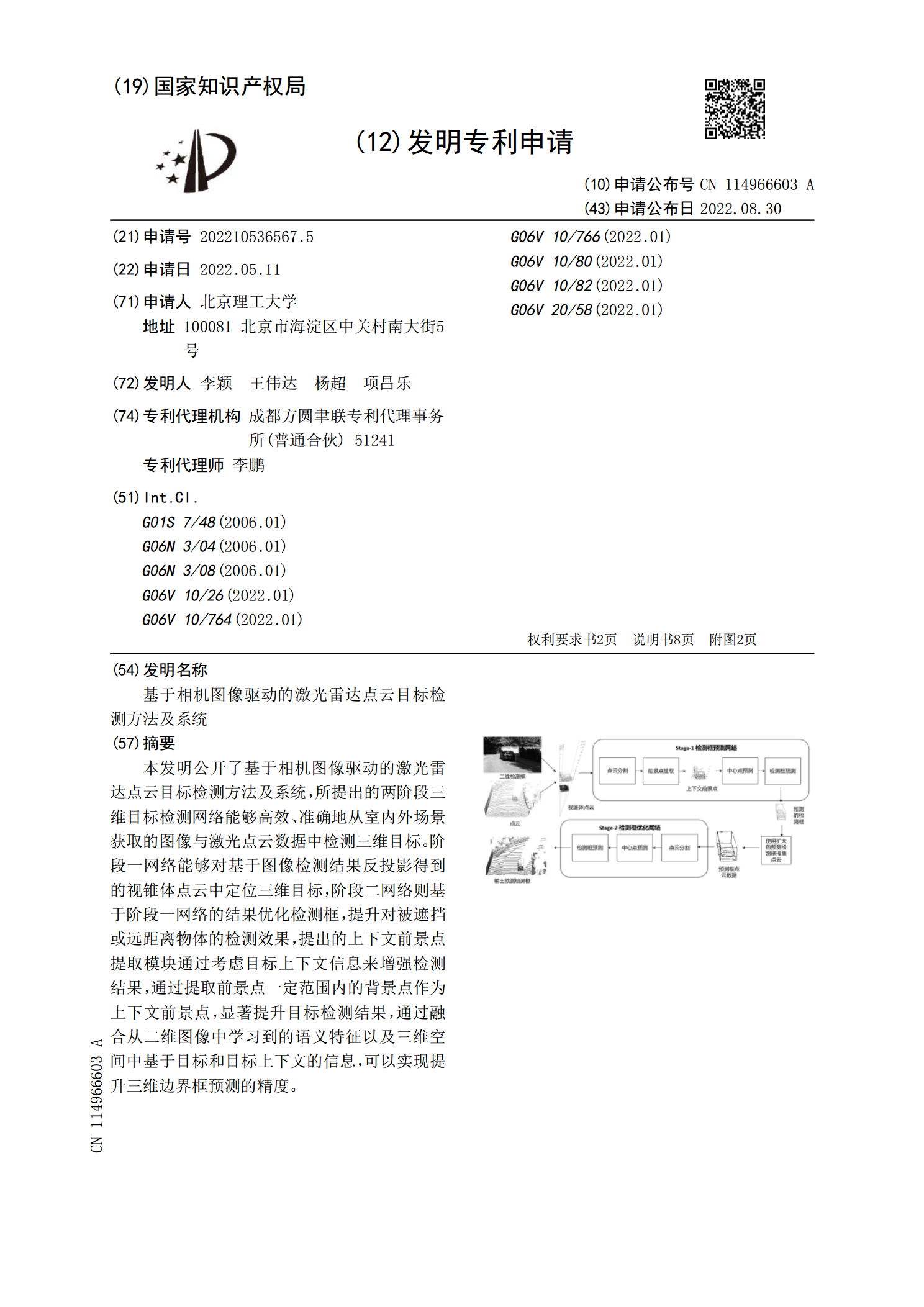
基于相机图像驱动的激光雷达点云目标检测方法及系统.pdf
本发明公开了基于相机图像驱动的激光雷达点云目标检测方法及系统,所提出的两阶段三维目标检测网络能够高效、准确地从室内外场景获取的图像与激光点云数据中检测三维目标。阶段一网络能够对基于图像检测结果反投影得到的视锥体点云中定位三维目标,阶段二网络则基于阶段一网络的结果优化检测框,提升对被遮挡或远距离物体的检测效果,提出的上下文前景点提取模块通过考虑目标上下文信息来增强检测结果,通过提取前景点一定范围内的背景点作为上下文前景点,显著提升目标检测结果,通过融合从二维图像中学习到的语义特征以及三维空间中基于目标和目标
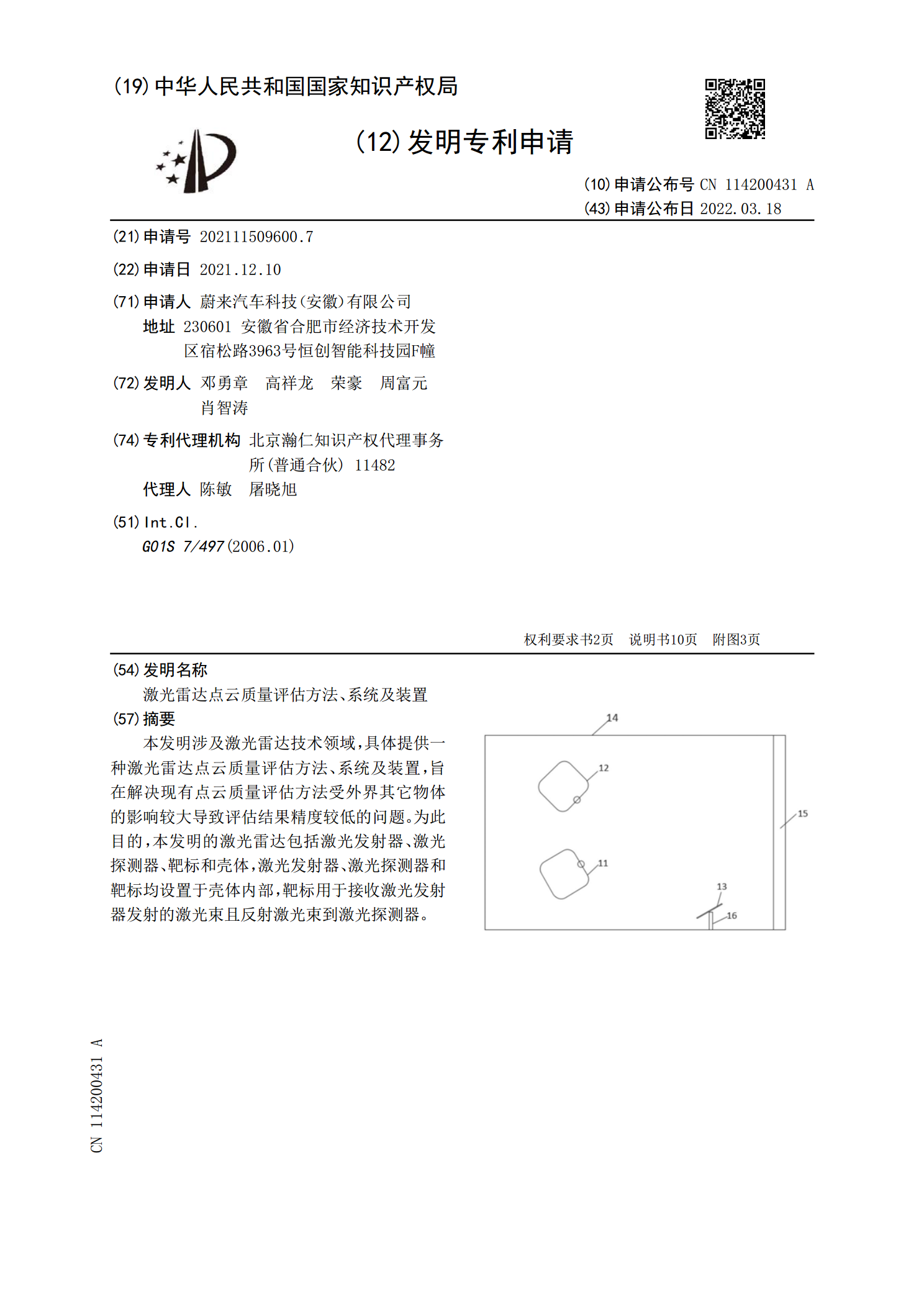
激光雷达点云质量评估方法、系统及装置.pdf
本发明涉及激光雷达技术领域,具体提供一种激光雷达点云质量评估方法、系统及装置,旨在解决现有点云质量评估方法受外界其它物体的影响较大导致评估结果精度较低的问题。为此目的,本发明的激光雷达包括激光发射器、激光探测器、靶标和壳体,激光发射器、激光探测器和靶标均设置于壳体内部,靶标用于接收激光发射器发射的激光束且反射激光束到激光探测器。
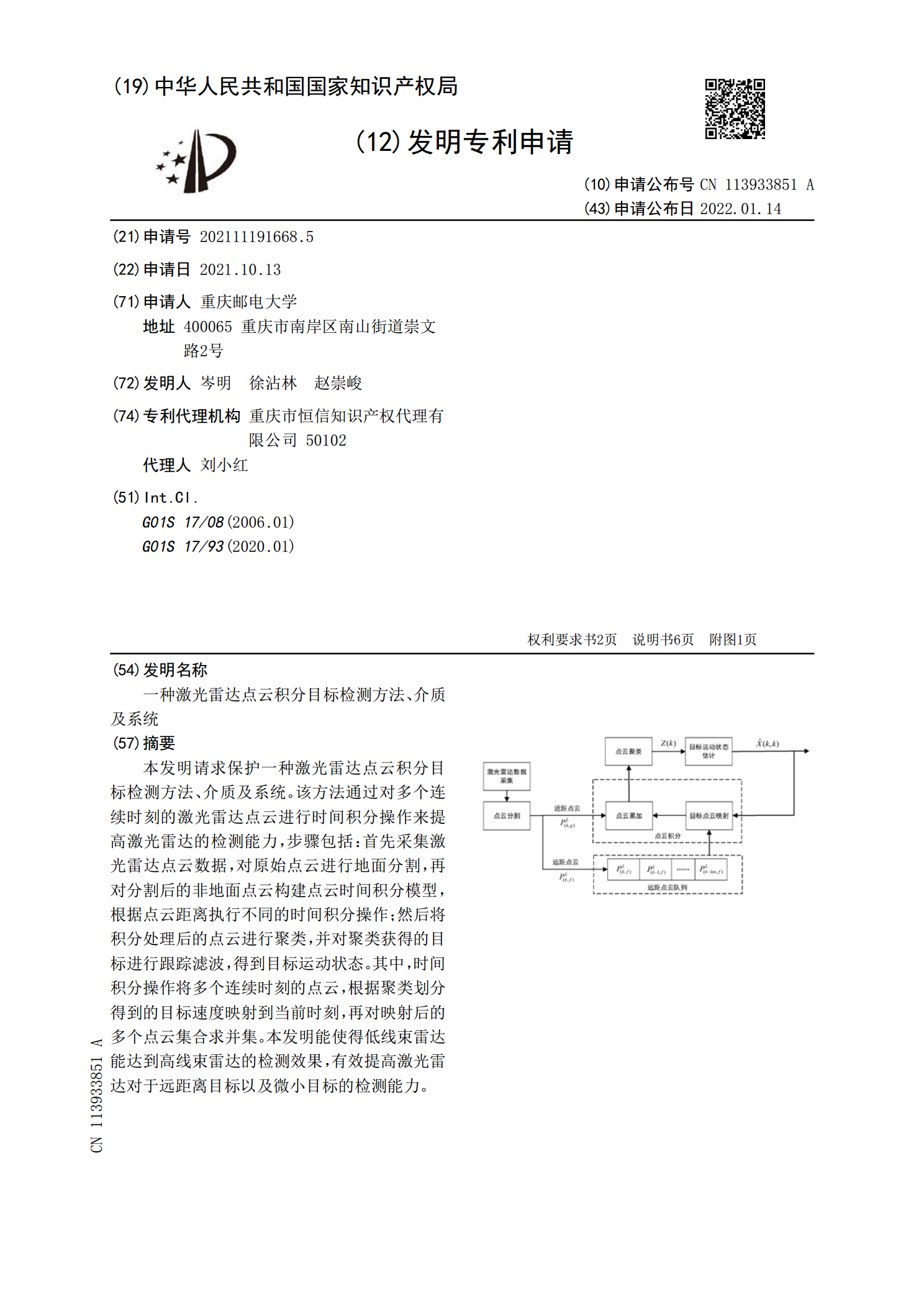
一种激光雷达点云积分目标检测方法、介质及系统.pdf
本发明请求保护一种激光雷达点云积分目标检测方法、介质及系统。该方法通过对多个连续时刻的激光雷达点云进行时间积分操作来提高激光雷达的检测能力,步骤包括:首先采集激光雷达点云数据,对原始点云进行地面分割,再对分割后的非地面点云构建点云时间积分模型,根据点云距离执行不同的时间积分操作;然后将积分处理后的点云进行聚类,并对聚类获得的目标进行跟踪滤波,得到目标运动状态。其中,时间积分操作将多个连续时刻的点云,根据聚类划分得到的目标速度映射到当前时刻,再对映射后的多个点云集合求并集。本发明能使得低线束雷达能达到高线束
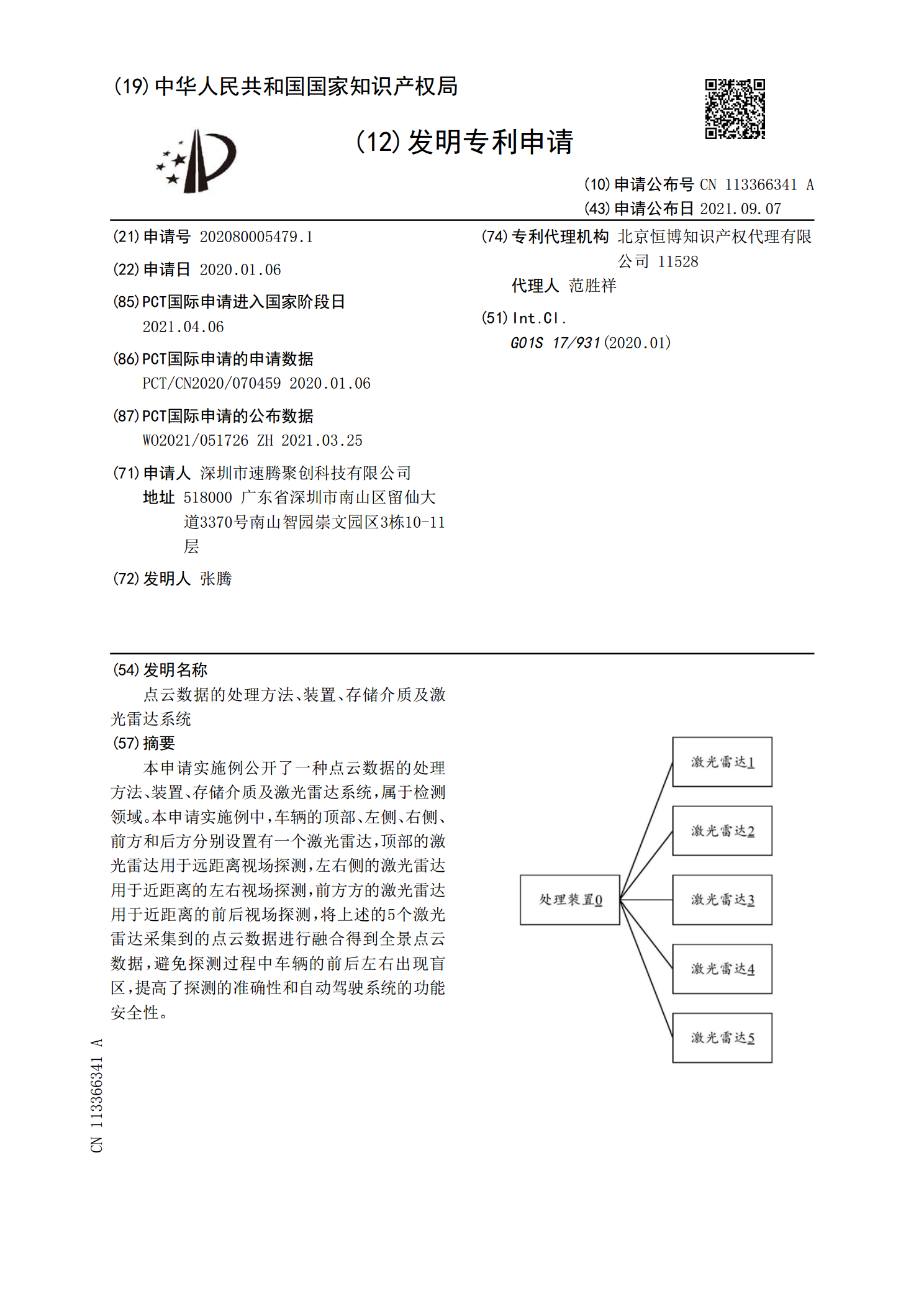
点云数据的处理方法、装置、存储介质及激光雷达系统.pdf
本申请实施例公开了一种点云数据的处理方法、装置、存储介质及激光雷达系统,属于检测领域。本申请实施例中,车辆的顶部、左侧、右侧、前方和后方分别设置有一个激光雷达,顶部的激光雷达用于远距离视场探测,左右侧的激光雷达用于近距离的左右视场探测,前方方的激光雷达用于近距离的前后视场探测,将上述的5个激光雷达采集到的点云数据进行融合得到全景点云数据,避免探测过程中车辆的前后左右出现盲区,提高了探测的准确性和自动驾驶系统的功能安全性。