
一种SLAM与UWB的实时融合与建图方法.pdf

是你****馨呀

1/10
2/10
3/10
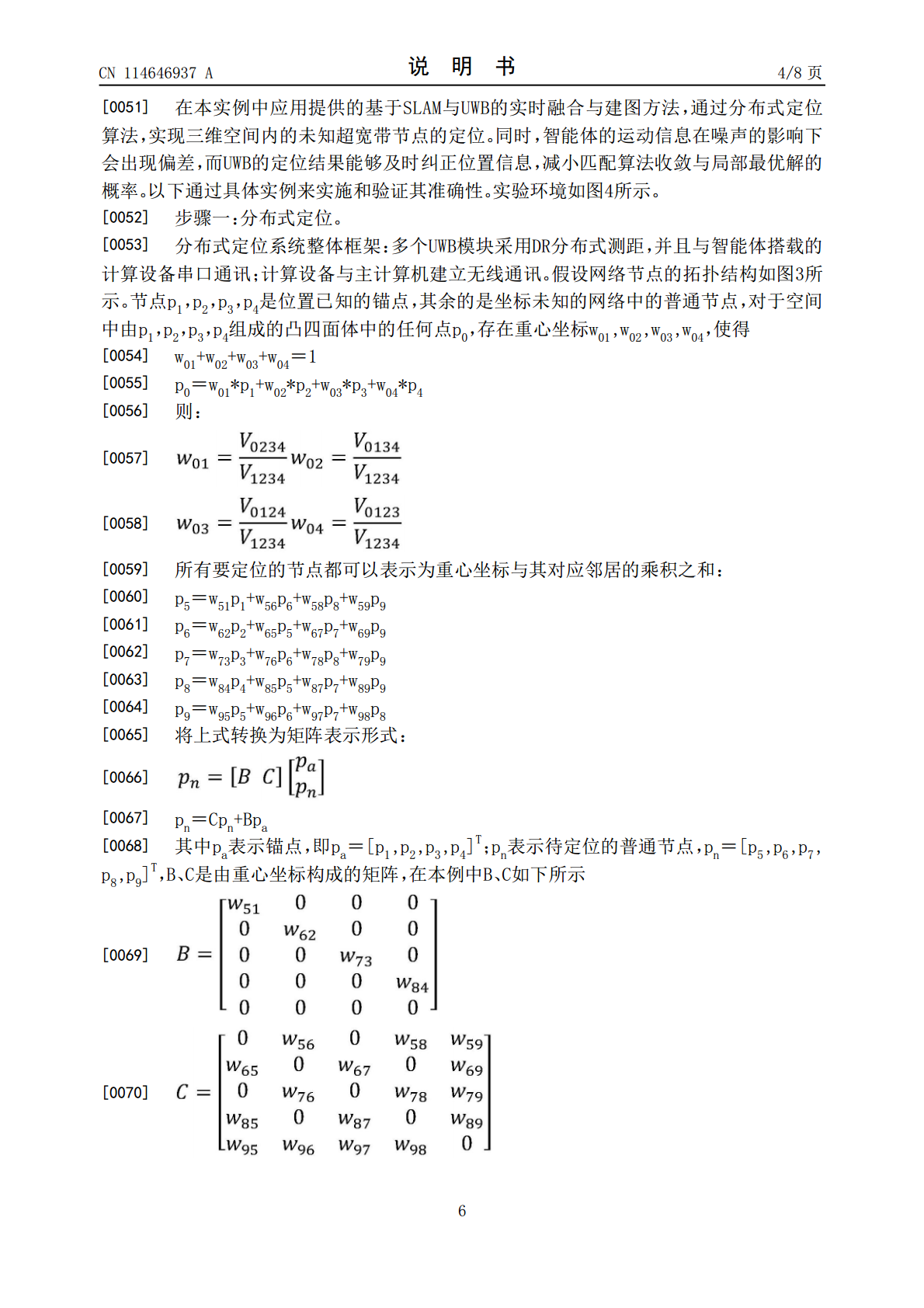
4/10

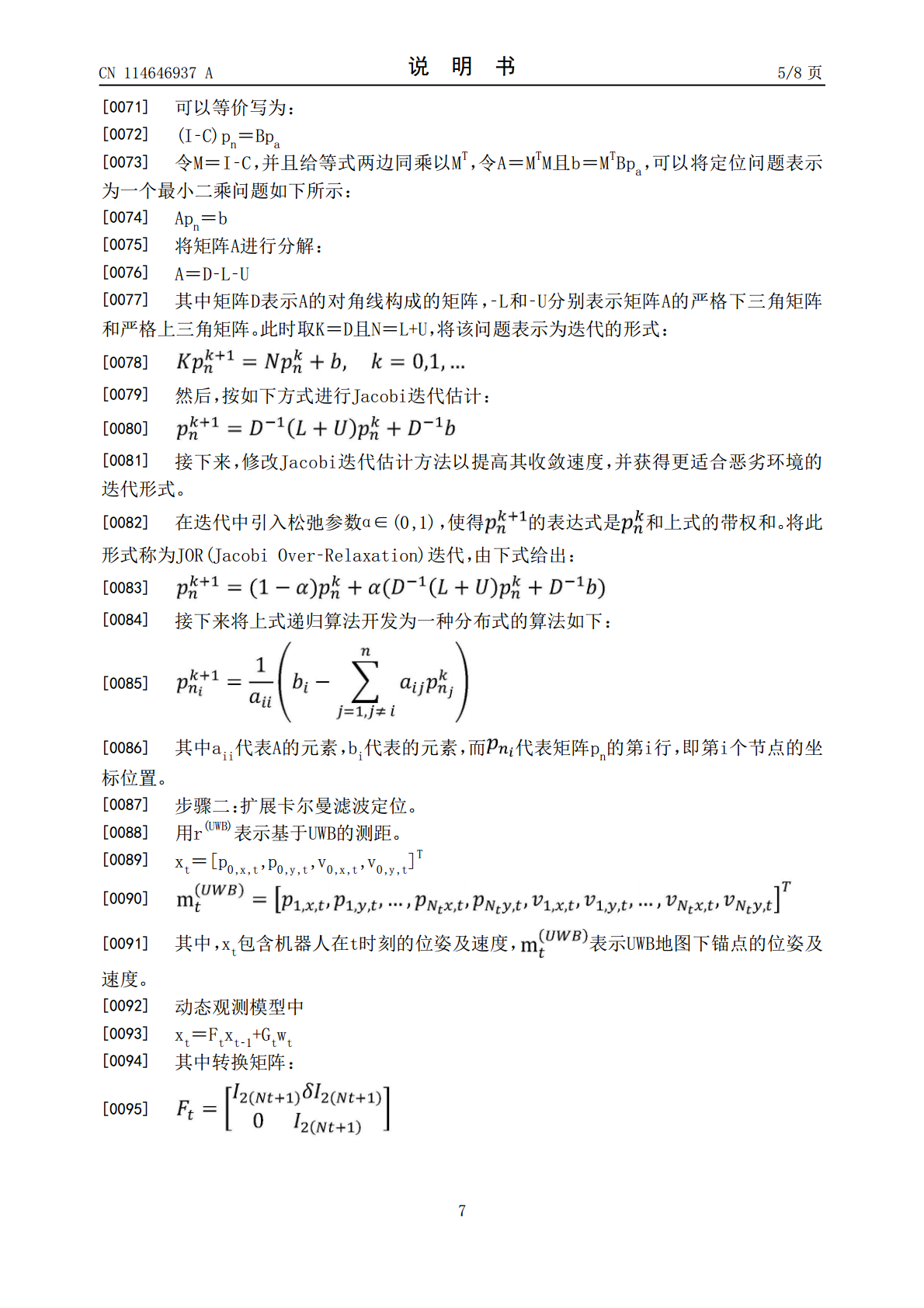
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种SLAM与UWB的实时融合与建图方法.pdf
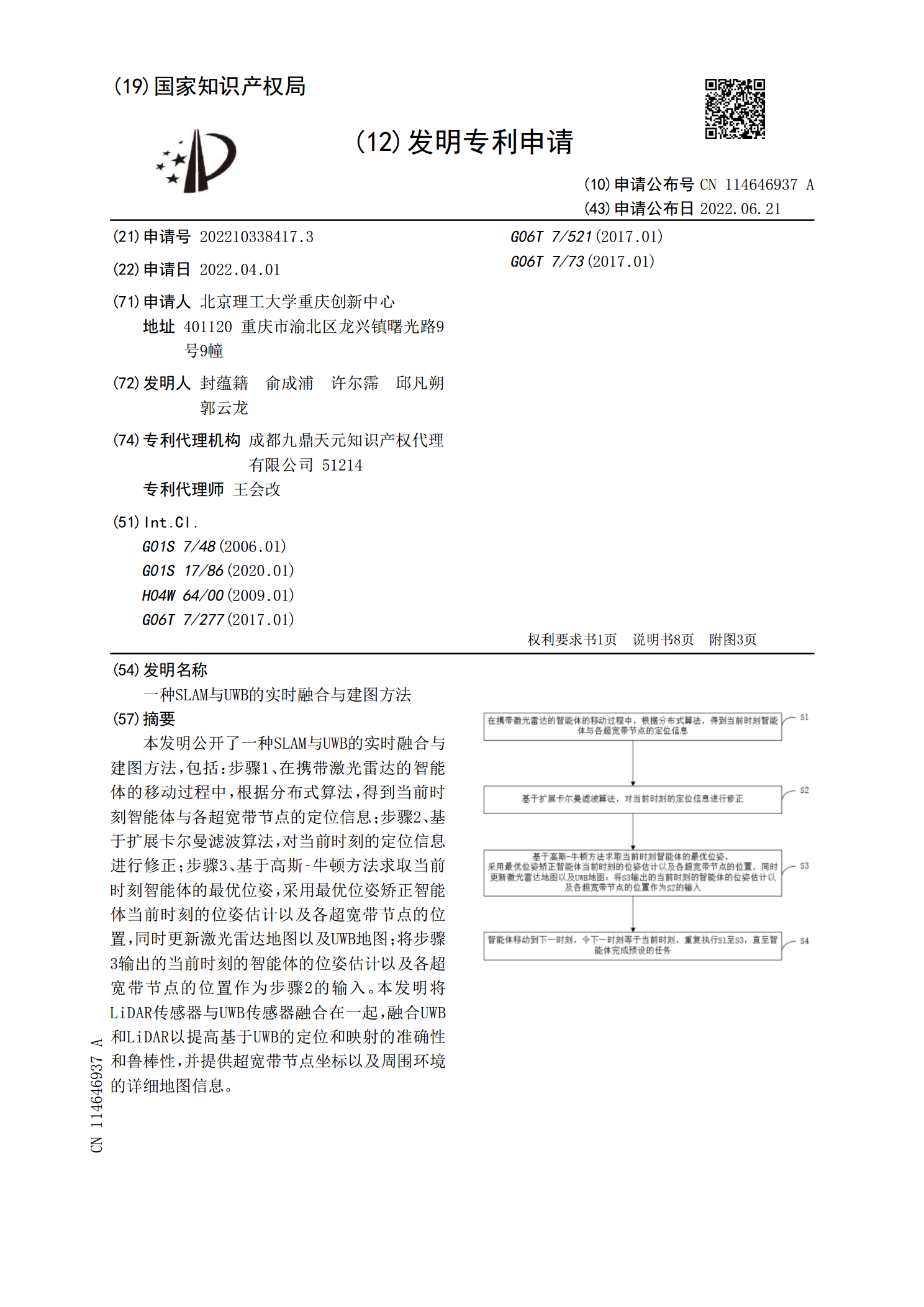
本发明公开了一种SLAM与UWB的实时融合与建图方法,包括:步骤1、在携带激光雷达的智能体的移动过程中,根据分布式算法,得到当前时刻智能体与各超宽带节点的定位信息;步骤2、基于扩展卡尔曼滤波算法,对当前时刻的定位信息进行修正;步骤3、基于高斯?牛顿方法求取当前时刻智能体的最优位姿,采用最优位姿矫正智能体当前时刻的位姿估计以及各超宽带节点的位置,同时更新激光雷达地图以及UWB地图;将步骤3输出的当前时刻的智能体的位姿估计以及各超宽带节点的位置作为步骤2的输入。本发明将LiDAR传感器与UWB传感器融合在一起

一种基于sparse‑slam的实时建图方法.pdf
本发明提供了一种基于sparse‑slam的实时建图方法,包括如下两个并列运行的线程:线程1,跟踪并提取关键帧;线程2,创建并插入点云MAP。本发明的实时建图方法采用两个并列线程,能保证两个线程的实时性,既节省了时间,又尽可能的保留了图像的特征,在保证了算法高效实时的前提下,保留更多的场景信息。
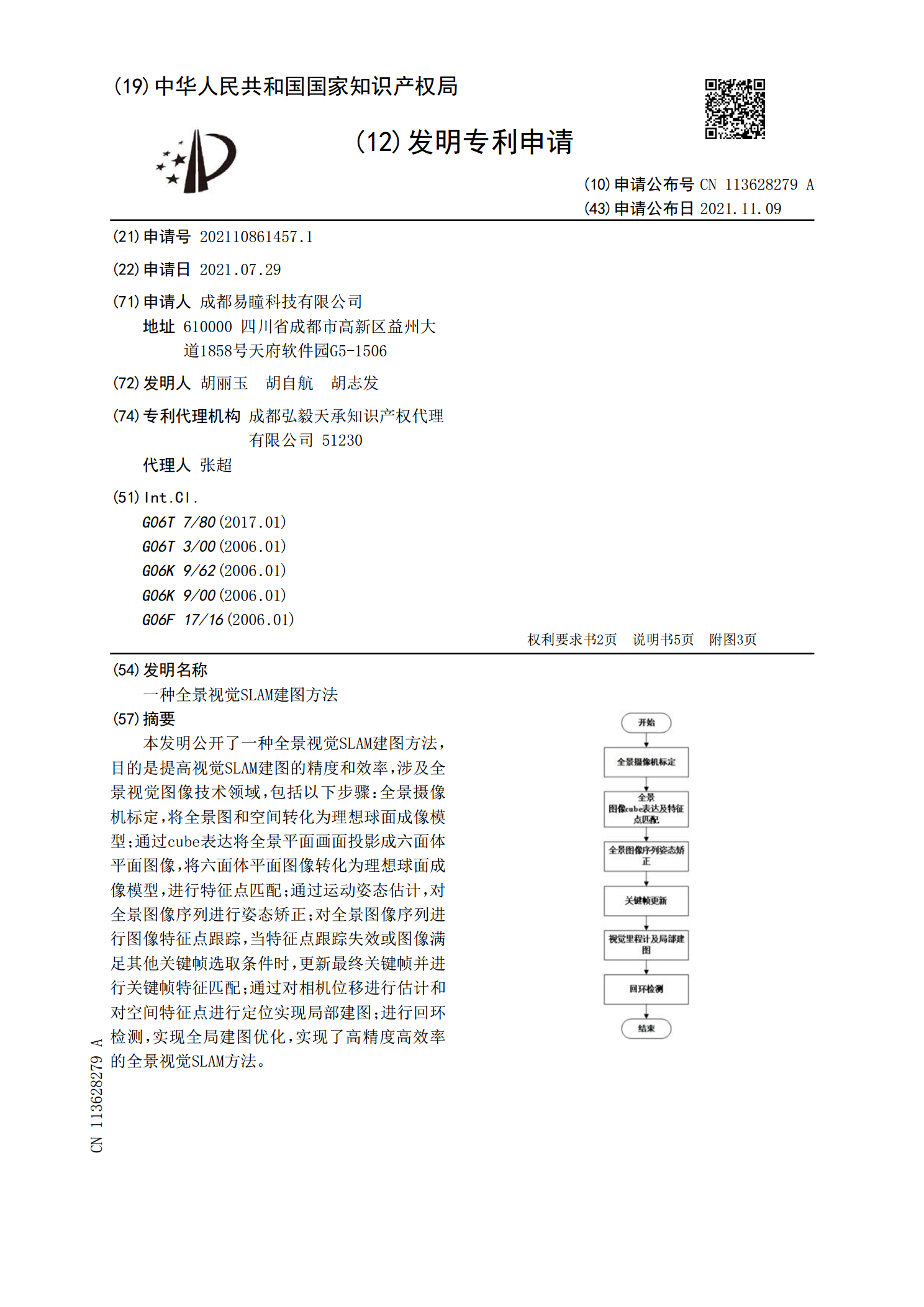
一种全景视觉SLAM建图方法.pdf
本发明公开了一种全景视觉SLAM建图方法,目的是提高视觉SLAM建图的精度和效率,涉及全景视觉图像技术领域,包括以下步骤:全景摄像机标定,将全景图和空间转化为理想球面成像模型;通过cube表达将全景平面画面投影成六面体平面图像,将六面体平面图像转化为理想球面成像模型,进行特征点匹配;通过运动姿态估计,对全景图像序列进行姿态矫正;对全景图像序列进行图像特征点跟踪,当特征点跟踪失效或图像满足其他关键帧选取条件时,更新最终关键帧并进行关键帧特征匹配;通过对相机位移进行估计和对空间特征点进行定位实现局部建图;进行
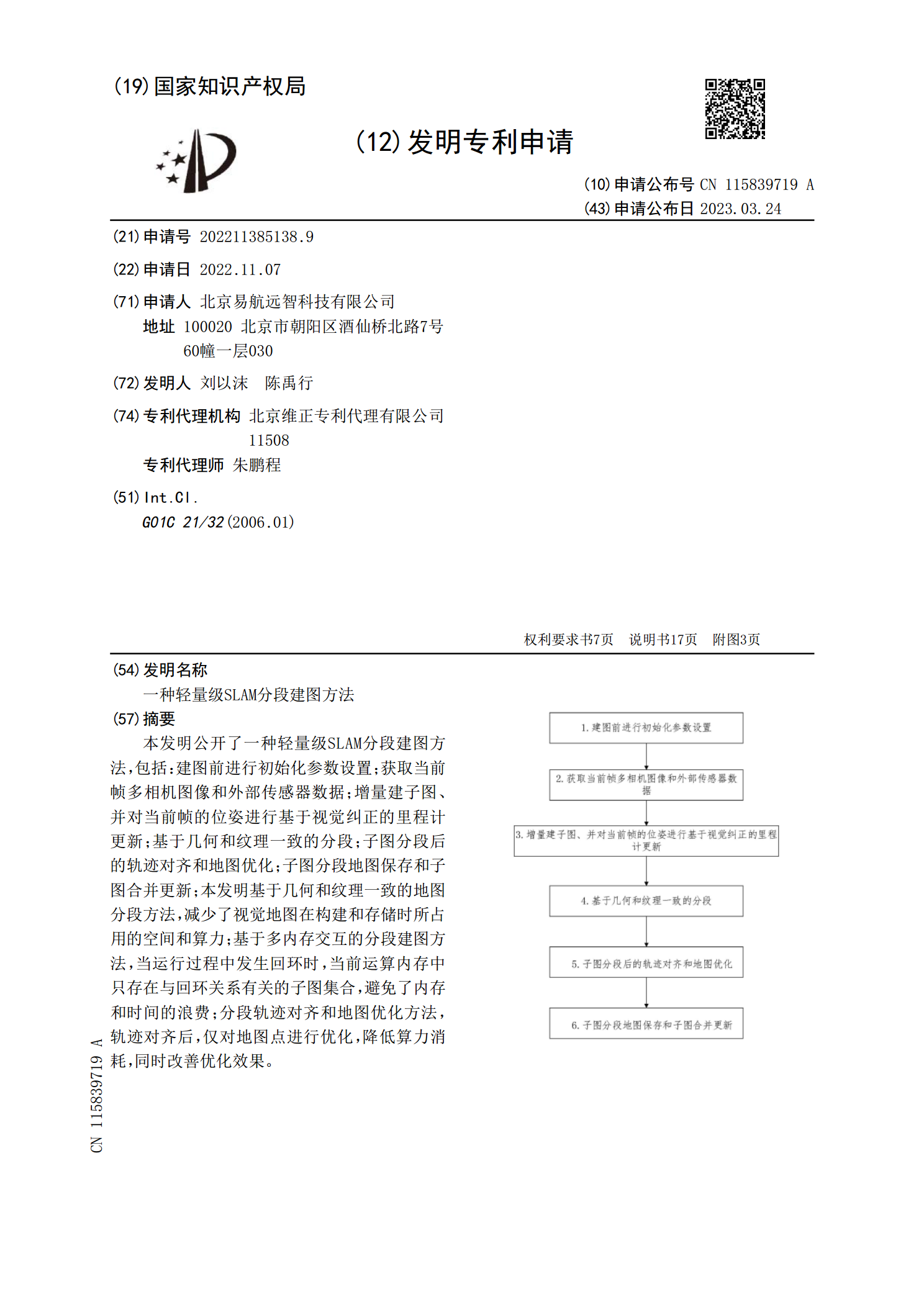
一种轻量级SLAM分段建图方法.pdf
本发明公开了一种轻量级SLAM分段建图方法,包括:建图前进行初始化参数设置;获取当前帧多相机图像和外部传感器数据;增量建子图、并对当前帧的位姿进行基于视觉纠正的里程计更新;基于几何和纹理一致的分段;子图分段后的轨迹对齐和地图优化;子图分段地图保存和子图合并更新;本发明基于几何和纹理一致的地图分段方法,减少了视觉地图在构建和存储时所占用的空间和算力;基于多内存交互的分段建图方法,当运行过程中发生回环时,当前运算内存中只存在与回环关系有关的子图集合,避免了内存和时间的浪费;分段轨迹对齐和地图优化方法,轨迹对齐
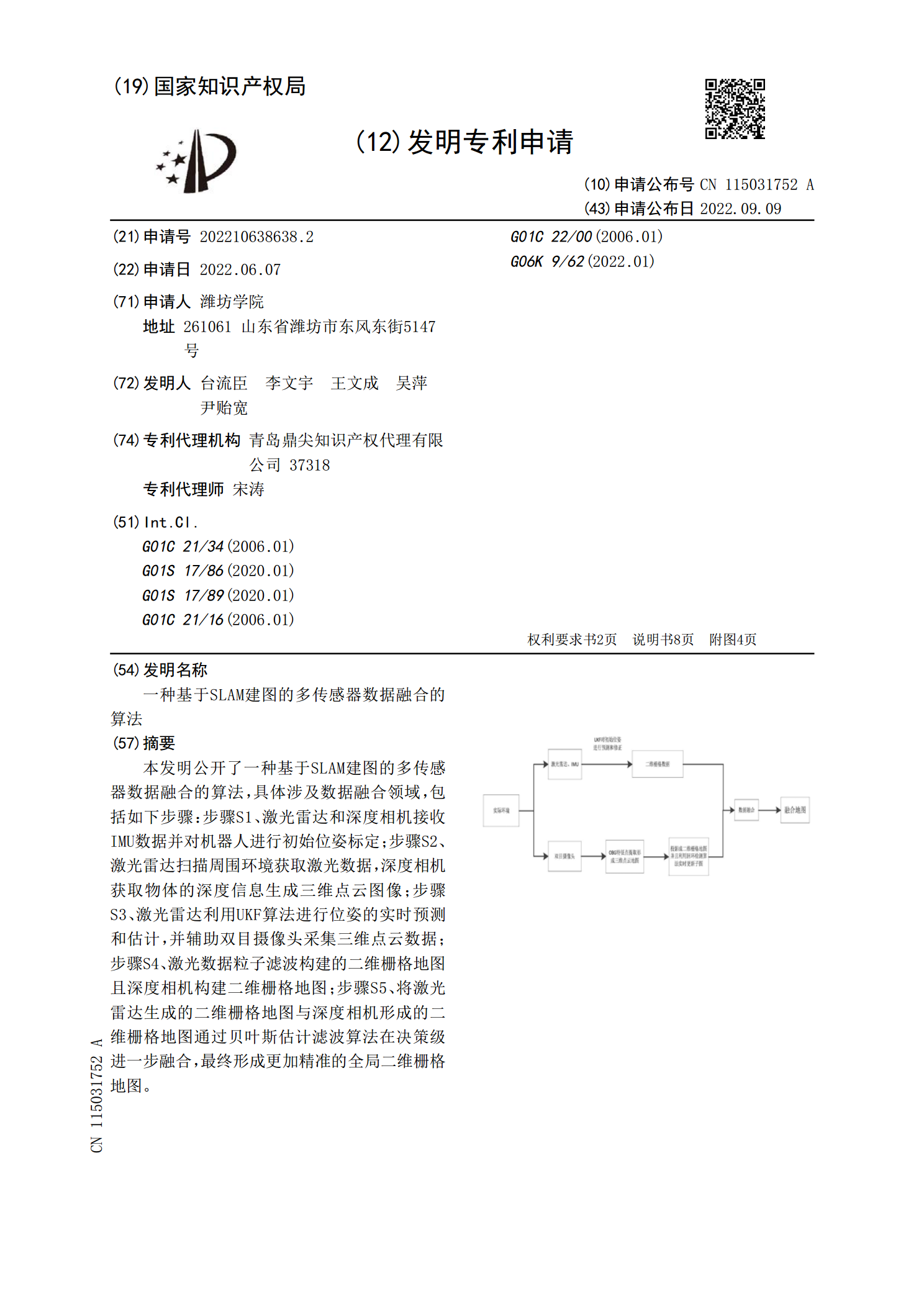
一种基于SLAM建图的多传感器数据融合的算法.pdf
本发明公开了一种基于SLAM建图的多传感器数据融合的算法,具体涉及数据融合领域,包括如下步骤:步骤S1、激光雷达和深度相机接收IMU数据并对机器人进行初始位姿标定;步骤S2、激光雷达扫描周围环境获取激光数据,深度相机获取物体的深度信息生成三维点云图像;步骤S3、激光雷达利用UKF算法进行位姿的实时预测和估计,并辅助双目摄像头采集三维点云数据;步骤S4、激光数据粒子滤波构建的二维栅格地图且深度相机构建二维栅格地图;步骤S5、将激光雷达生成的二维栅格地图与深度相机形成的二维栅格地图通过贝叶斯估计滤波算法在决策