
一种全景视觉SLAM建图方法.pdf

a是****澜吖

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种全景视觉SLAM建图方法.pdf
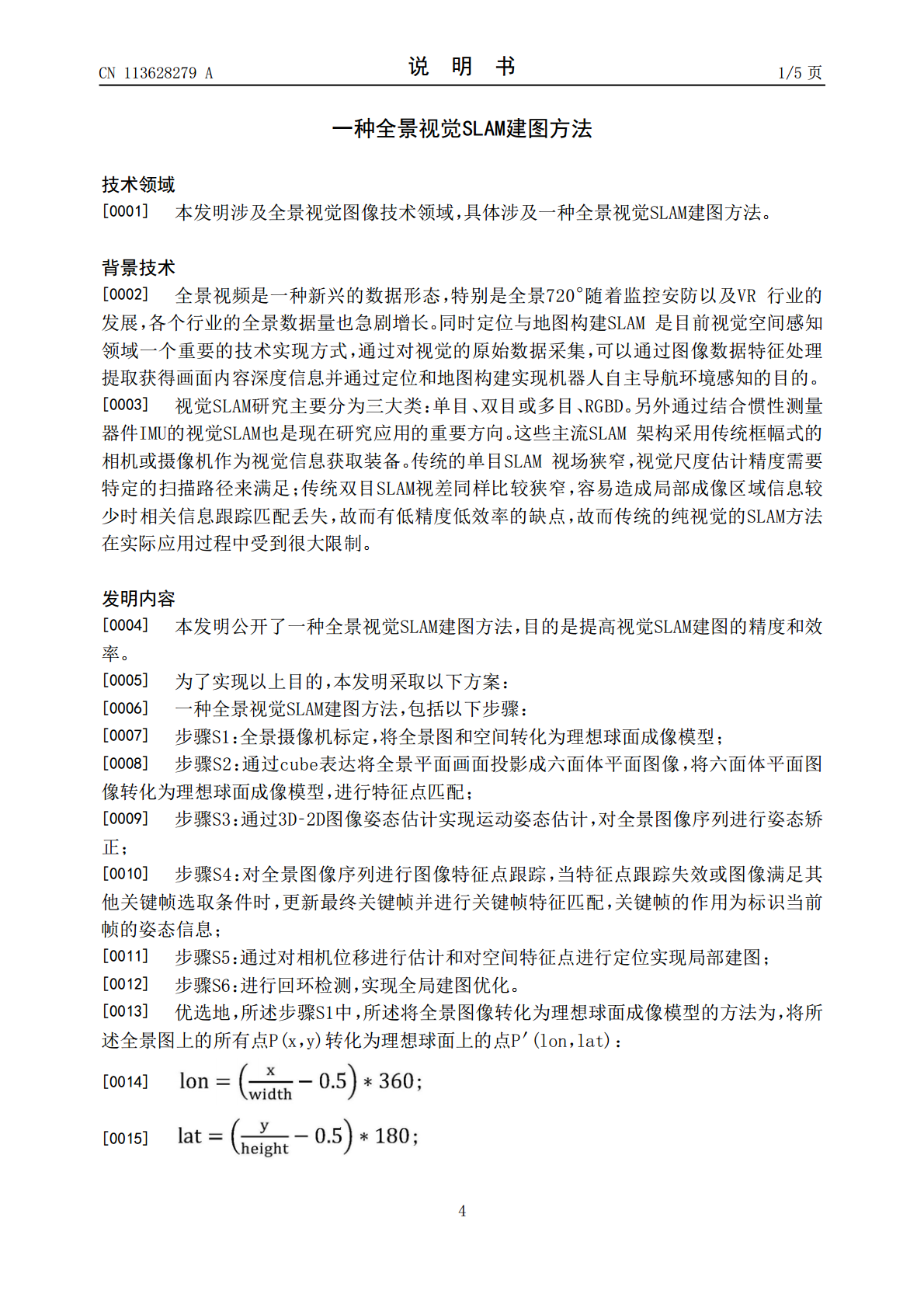
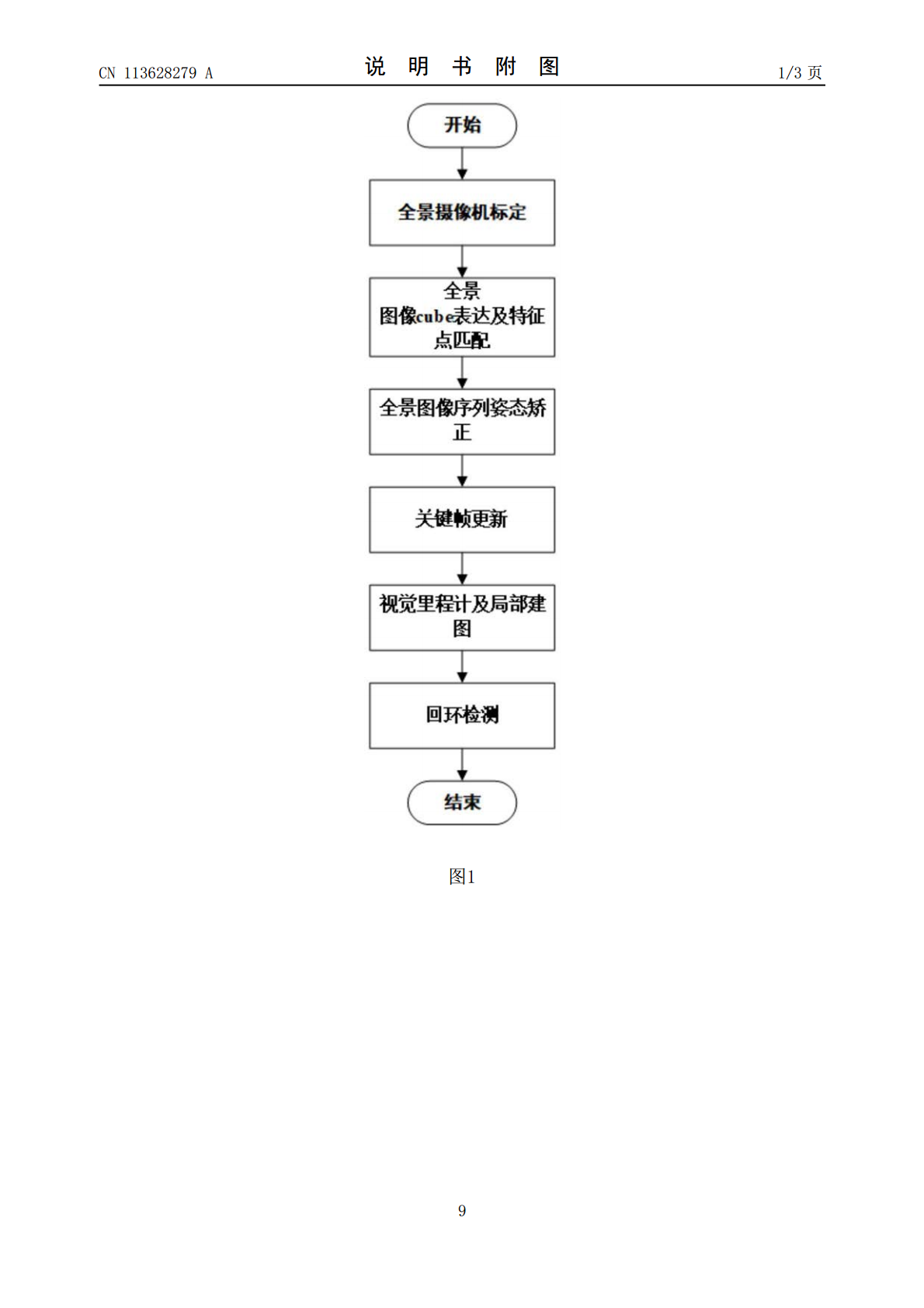
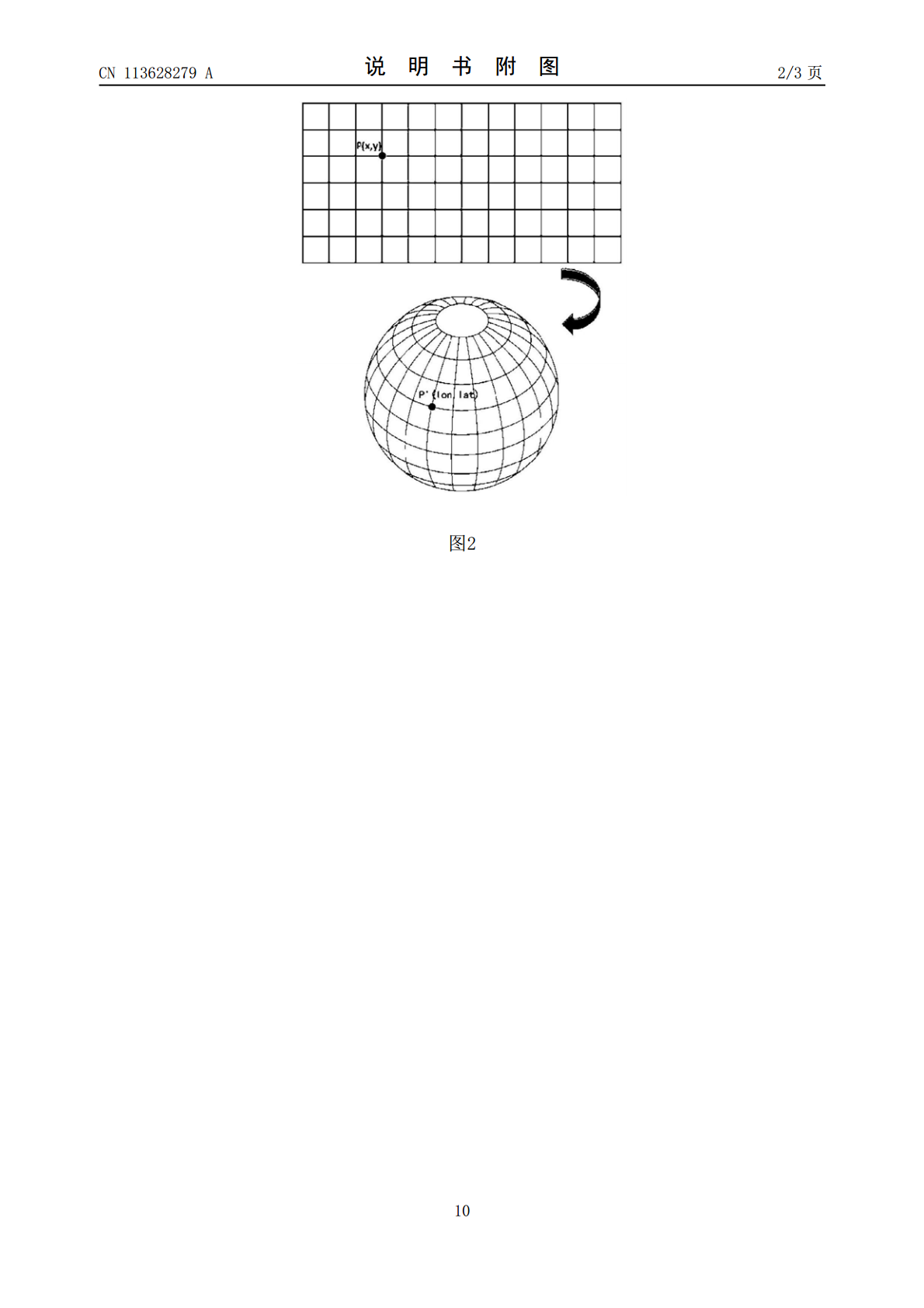
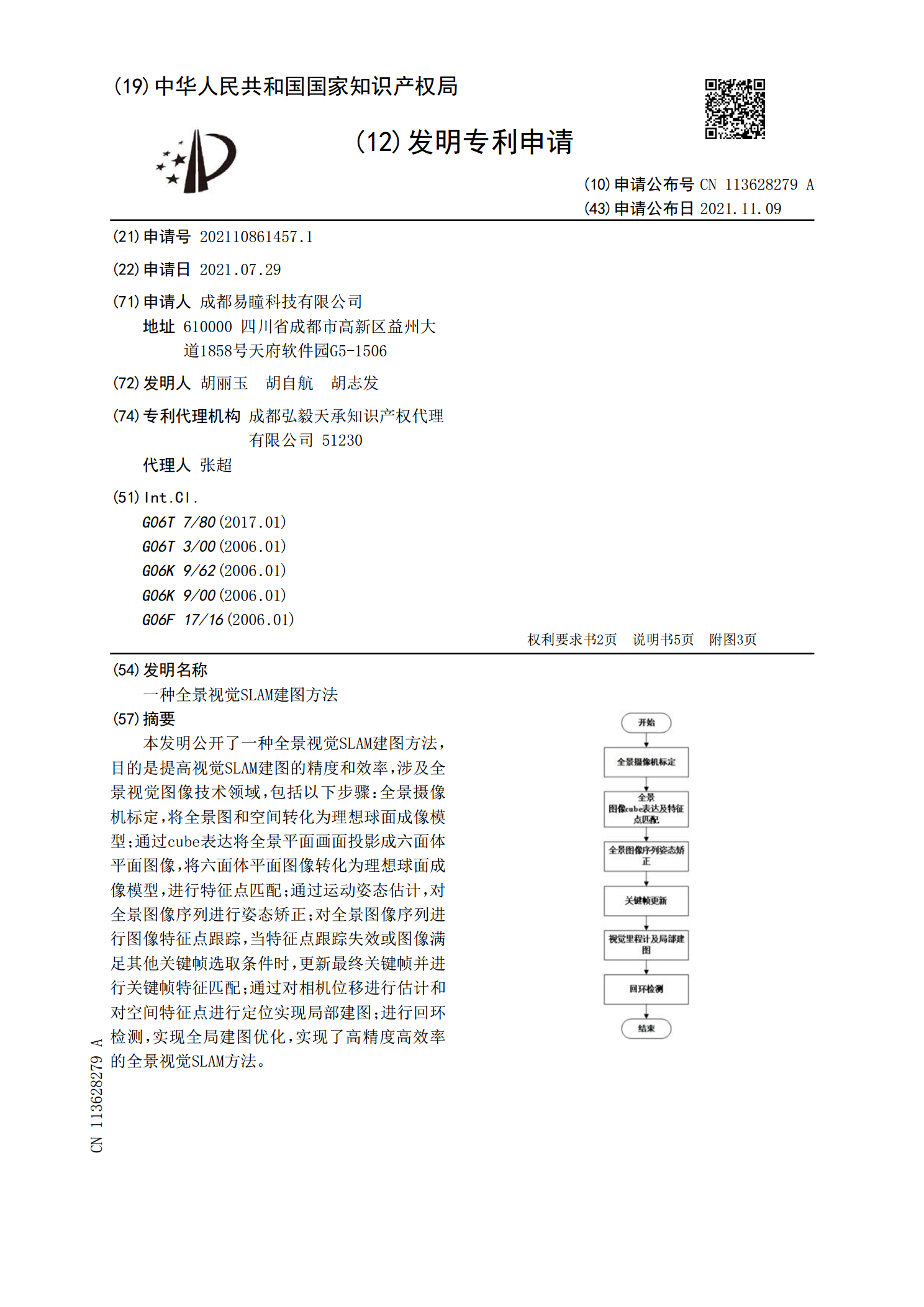
本发明公开了一种全景视觉SLAM建图方法,目的是提高视觉SLAM建图的精度和效率,涉及全景视觉图像技术领域,包括以下步骤:全景摄像机标定,将全景图和空间转化为理想球面成像模型;通过cube表达将全景平面画面投影成六面体平面图像,将六面体平面图像转化为理想球面成像模型,进行特征点匹配;通过运动姿态估计,对全景图像序列进行姿态矫正;对全景图像序列进行图像特征点跟踪,当特征点跟踪失效或图像满足其他关键帧选取条件时,更新最终关键帧并进行关键帧特征匹配;通过对相机位移进行估计和对空间特征点进行定位实现局部建图;进行

一种基于多相机全景视觉的SLAM全向回环校正方法.pdf
本发明提出一种基于多相机全景视觉的SLAM全向回环校正方法,该方法利用多相机全景视觉系统提供的全景图像信息,对运动载体周围的环境进行全方位的感知,解决现有SLAM方法所用回环校正算法无法在传感器朝向差异较为明显时检测出相同场景的问题;通过冗余的视野范围,可以保证环境信息感知时没有盲区;通过去除匹配特征点中的重复信息来减弱冗余视野范围对回环检测的影响,可以在传感器位置相同时准确地检测出运动轨迹中的回环;在回环校正过程中通过特征点、地图点的全局匹配,使回环校正算法在传感器朝向差异较大的情况下也能够计算两个关键
一种通用视觉SLAM方法.pdf
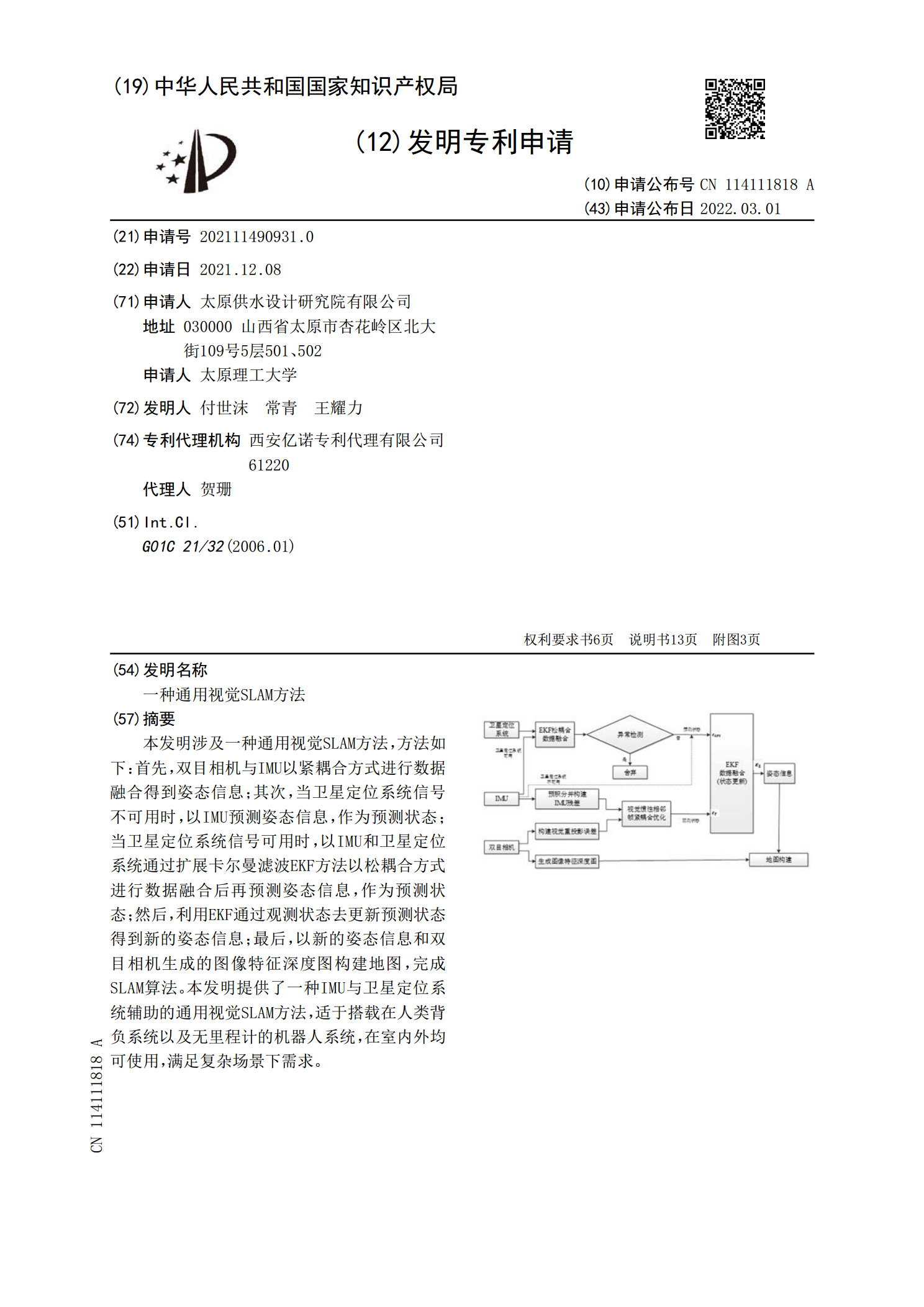
本发明涉及一种通用视觉SLAM方法,方法如下:首先,双目相机与IMU以紧耦合方式进行数据融合得到姿态信息;其次,当卫星定位系统信号不可用时,以IMU预测姿态信息,作为预测状态;当卫星定位系统信号可用时,以IMU和卫星定位系统通过扩展卡尔曼滤波EKF方法以松耦合方式进行数据融合后再预测姿态信息,作为预测状态;然后,利用EKF通过观测状态去更新预测状态得到新的姿态信息;最后,以新的姿态信息和双目相机生成的图像特征深度图构建地图,完成SLAM算法。本发明提供了一种IMU与卫星定位系统辅助的通用视觉SLAM方法,
一种轻量级SLAM分段建图方法.pdf
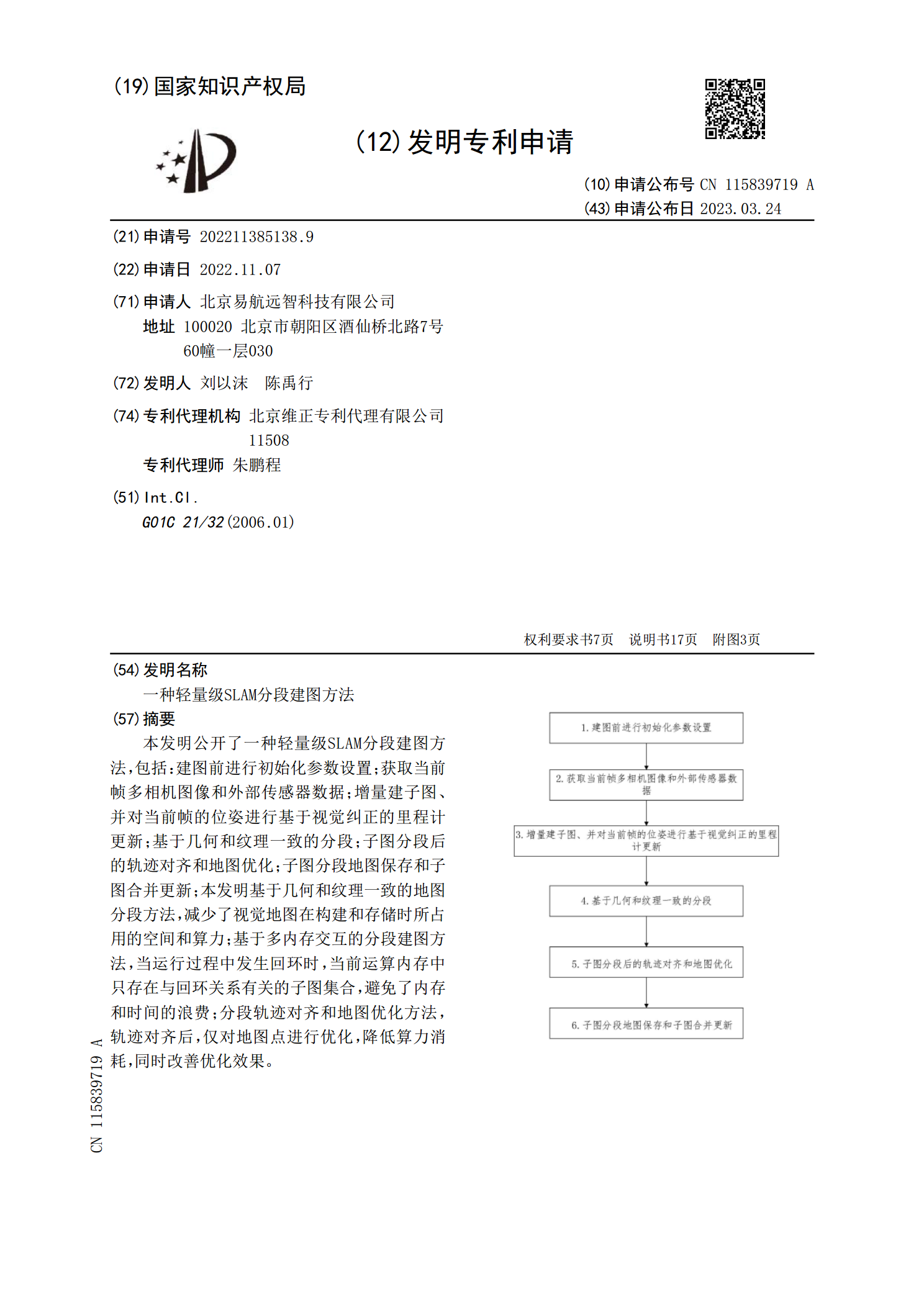
本发明公开了一种轻量级SLAM分段建图方法,包括:建图前进行初始化参数设置;获取当前帧多相机图像和外部传感器数据;增量建子图、并对当前帧的位姿进行基于视觉纠正的里程计更新;基于几何和纹理一致的分段;子图分段后的轨迹对齐和地图优化;子图分段地图保存和子图合并更新;本发明基于几何和纹理一致的地图分段方法,减少了视觉地图在构建和存储时所占用的空间和算力;基于多内存交互的分段建图方法,当运行过程中发生回环时,当前运算内存中只存在与回环关系有关的子图集合,避免了内存和时间的浪费;分段轨迹对齐和地图优化方法,轨迹对齐
一种SLAM与UWB的实时融合与建图方法.pdf
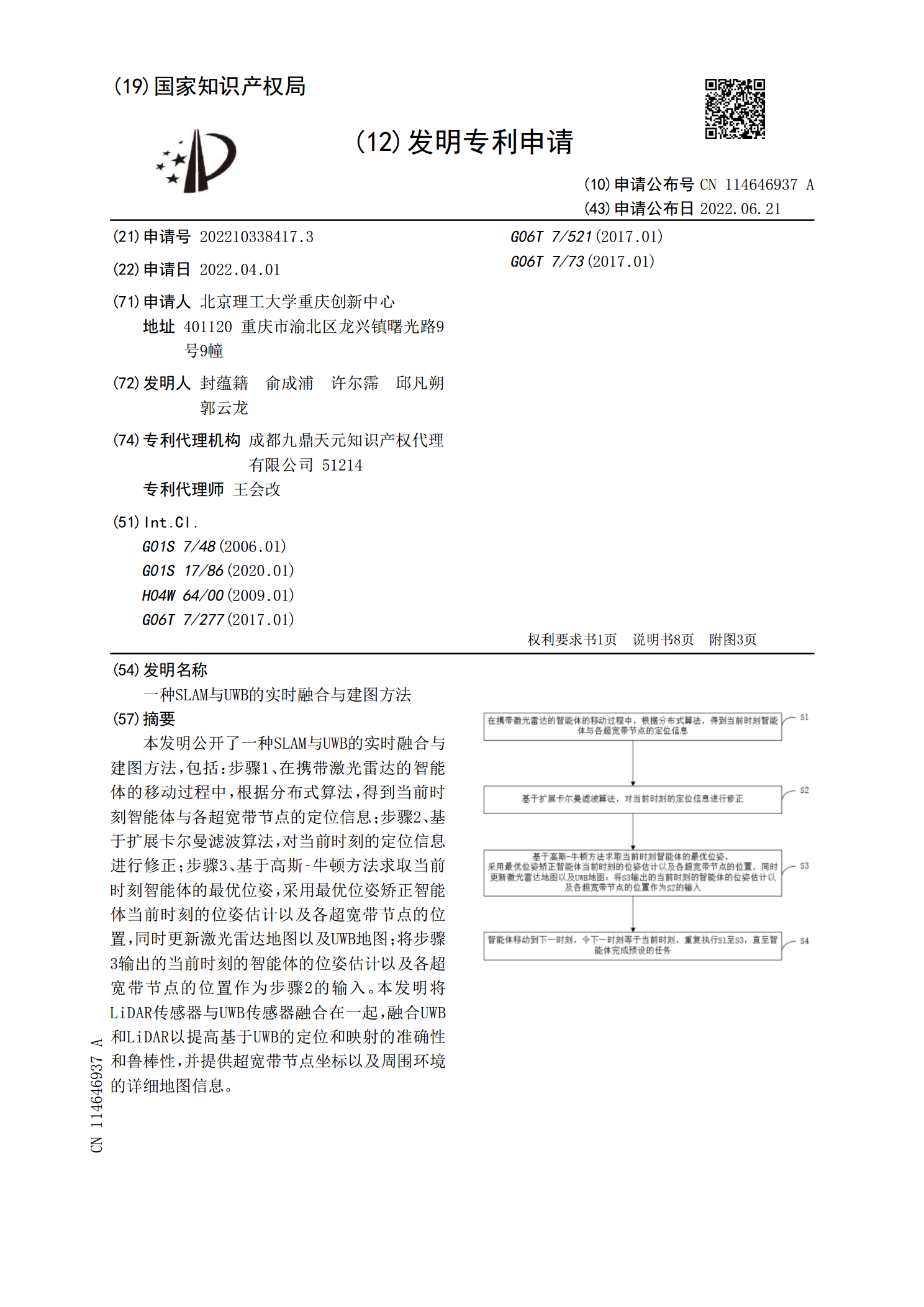
本发明公开了一种SLAM与UWB的实时融合与建图方法,包括:步骤1、在携带激光雷达的智能体的移动过程中,根据分布式算法,得到当前时刻智能体与各超宽带节点的定位信息;步骤2、基于扩展卡尔曼滤波算法,对当前时刻的定位信息进行修正;步骤3、基于高斯?牛顿方法求取当前时刻智能体的最优位姿,采用最优位姿矫正智能体当前时刻的位姿估计以及各超宽带节点的位置,同时更新激光雷达地图以及UWB地图;将步骤3输出的当前时刻的智能体的位姿估计以及各超宽带节点的位置作为步骤2的输入。本发明将LiDAR传感器与UWB传感器融合在一起