
障碍物检测方法、模型训练方法、装置及自动驾驶车辆.pdf

一条****轩吗


1/10

2/10
3/10

4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
障碍物检测方法、模型训练方法、装置及自动驾驶车辆.pdf
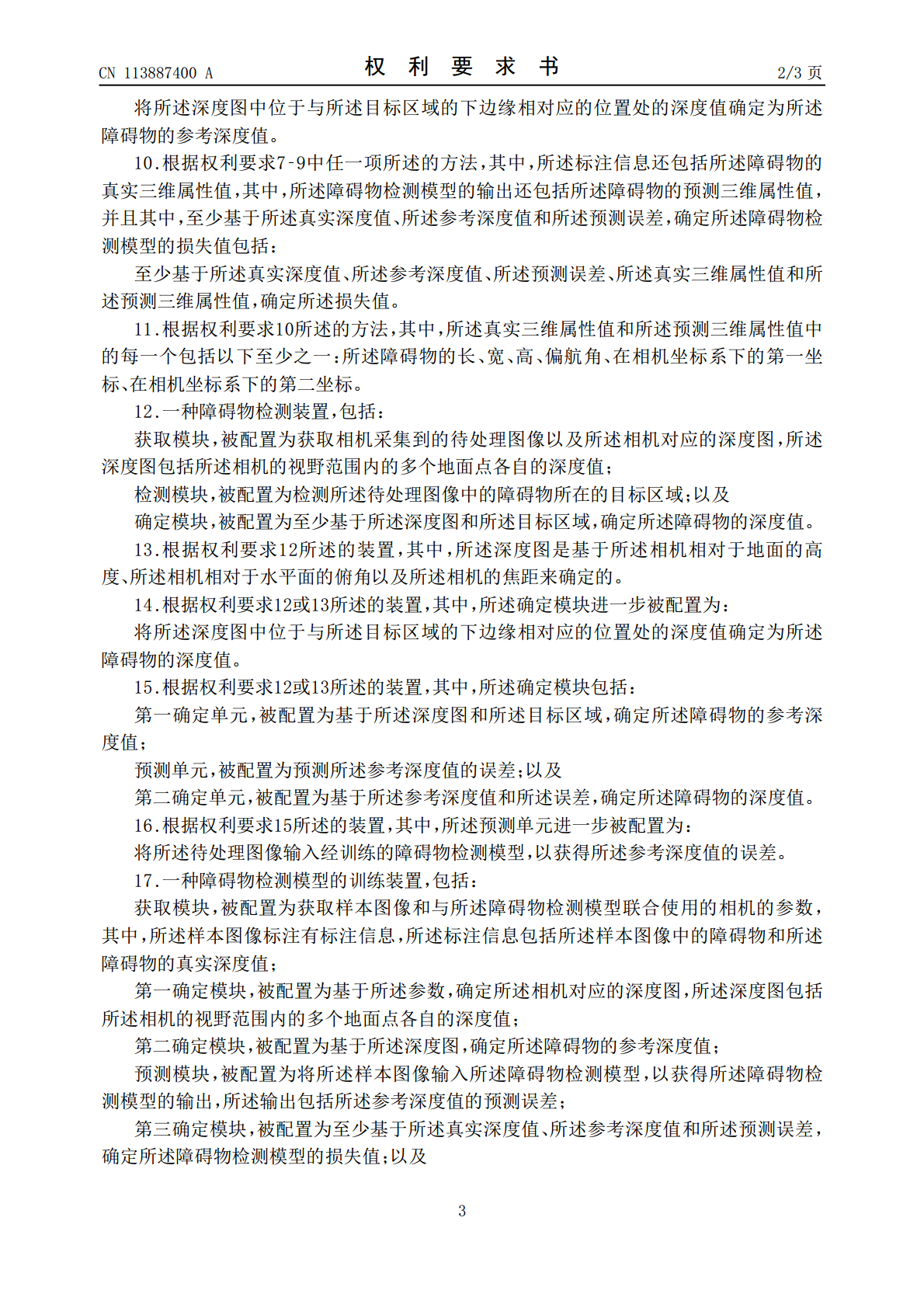
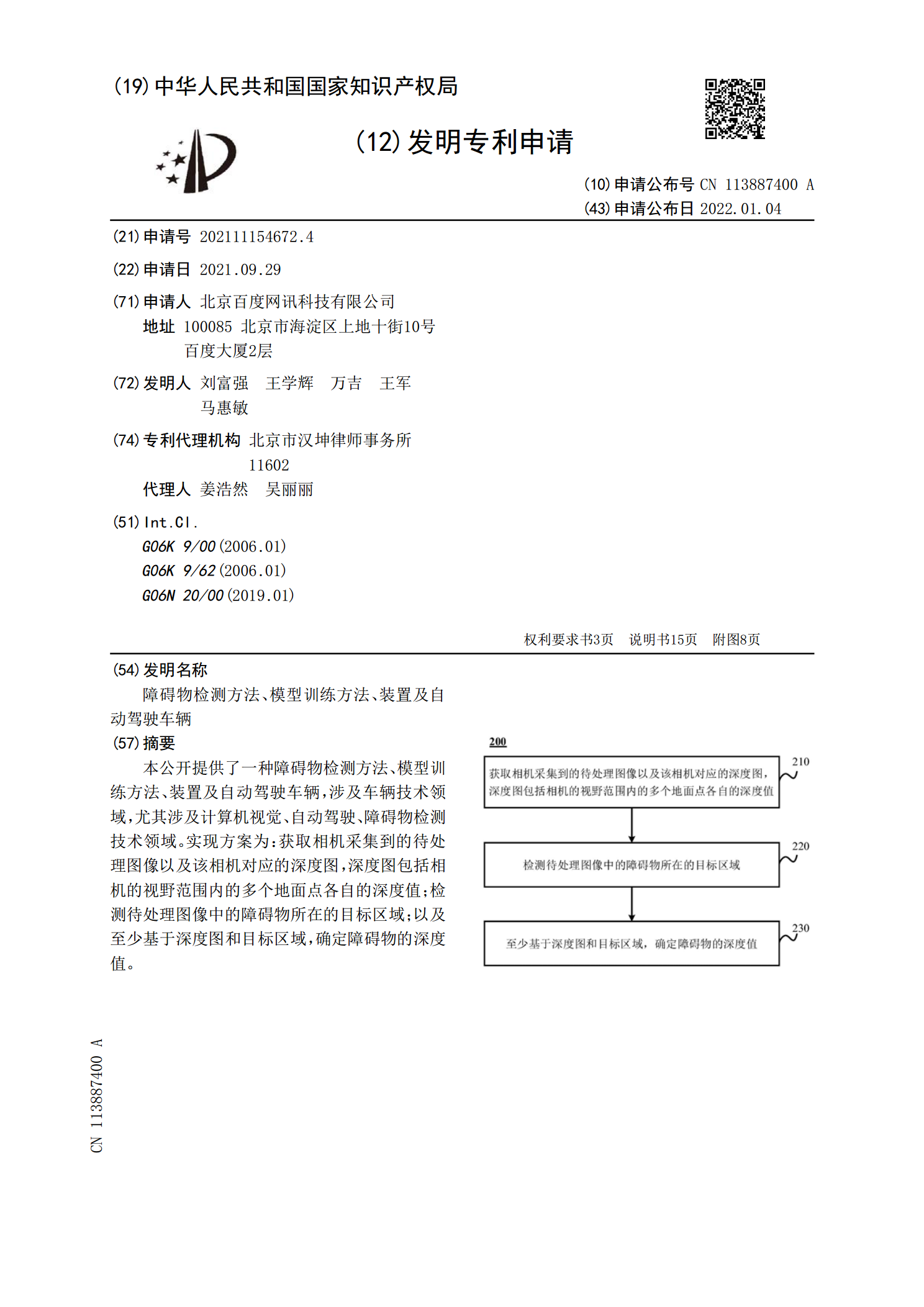
本公开提供了一种障碍物检测方法、模型训练方法、装置及自动驾驶车辆,涉及车辆技术领域,尤其涉及计算机视觉、自动驾驶、障碍物检测技术领域。实现方案为:获取相机采集到的待处理图像以及该相机对应的深度图,深度图包括相机的视野范围内的多个地面点各自的深度值;检测待处理图像中的障碍物所在的目标区域;以及至少基于深度图和目标区域,确定障碍物的深度值。
自动驾驶车辆的障碍物检测方法、装置、设备及介质.pdf
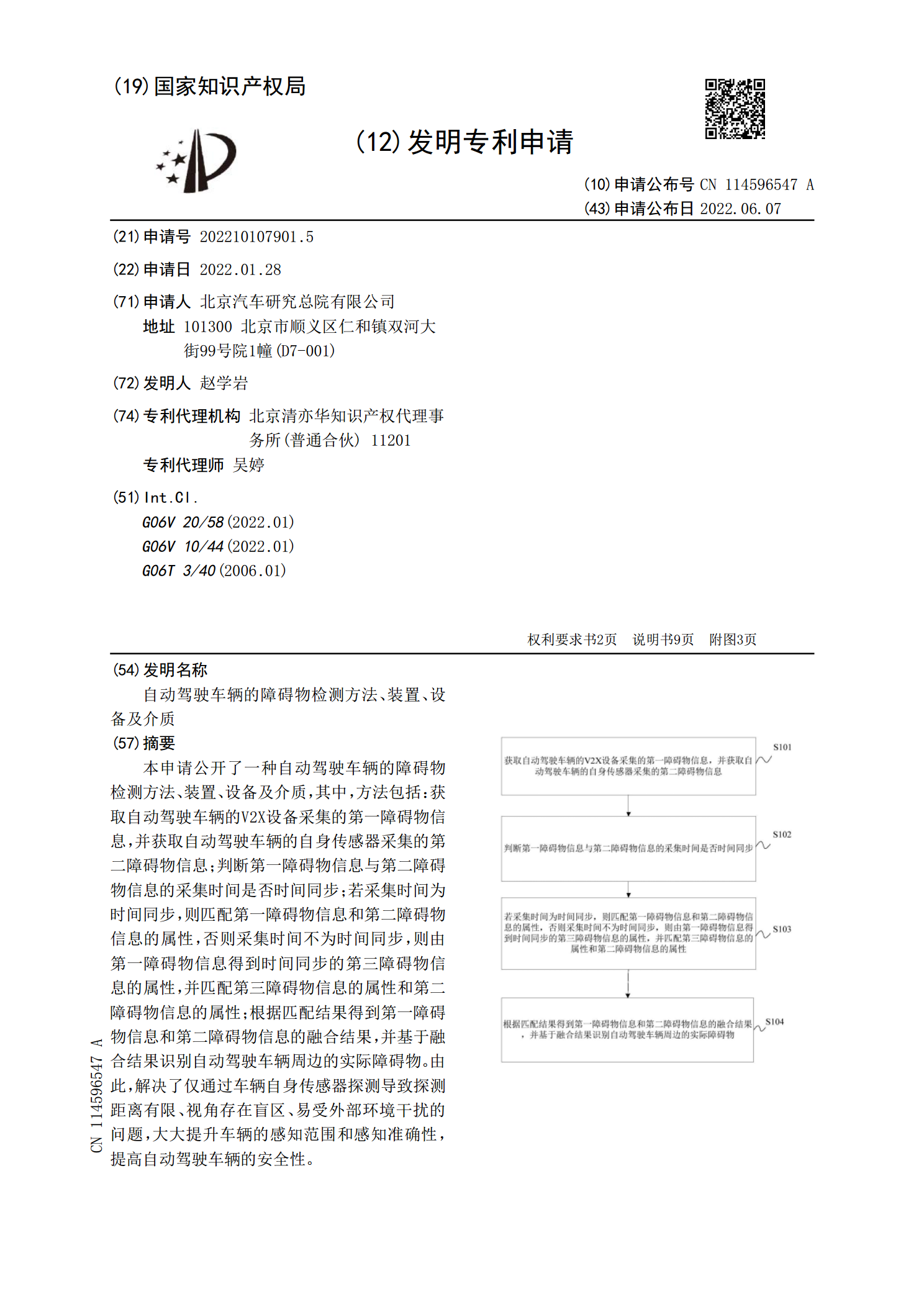
本申请公开了一种自动驾驶车辆的障碍物检测方法、装置、设备及介质,其中,方法包括:获取自动驾驶车辆的V2X设备采集的第一障碍物信息,并获取自动驾驶车辆的自身传感器采集的第二障碍物信息;判断第一障碍物信息与第二障碍物信息的采集时间是否时间同步;若采集时间为时间同步,则匹配第一障碍物信息和第二障碍物信息的属性,否则采集时间不为时间同步,则由第一障碍物信息得到时间同步的第三障碍物信息的属性,并匹配第三障碍物信息的属性和第二障碍物信息的属性;根据匹配结果得到第一障碍物信息和第二障碍物信息的融合结果,并基于融合结果识
一种自动驾驶车辆障碍物检测装置.pdf
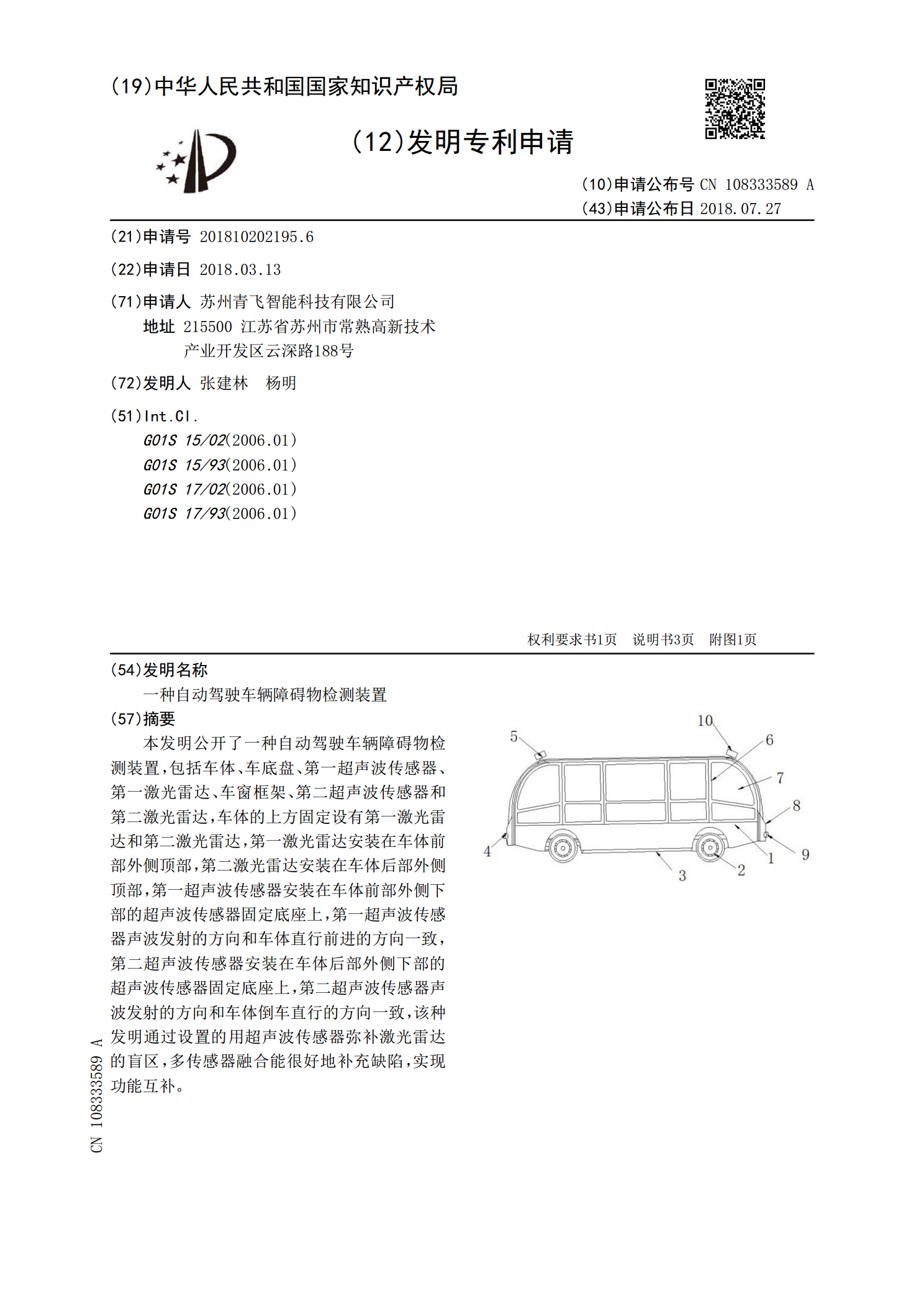
本发明公开了一种自动驾驶车辆障碍物检测装置,包括车体、车底盘、第一超声波传感器、第一激光雷达、车窗框架、第二超声波传感器和第二激光雷达,车体的上方固定设有第一激光雷达和第二激光雷达,第一激光雷达安装在车体前部外侧顶部,第二激光雷达安装在车体后部外侧顶部,第一超声波传感器安装在车体前部外侧下部的超声波传感器固定底座上,第一超声波传感器声波发射的方向和车体直行前进的方向一致,第二超声波传感器安装在车体后部外侧下部的超声波传感器固定底座上,第二超声波传感器声波发射的方向和车体倒车直行的方向一致,该种发明通过设置
预测障碍物的运动轨迹的方法、装置及自动驾驶车辆.pdf
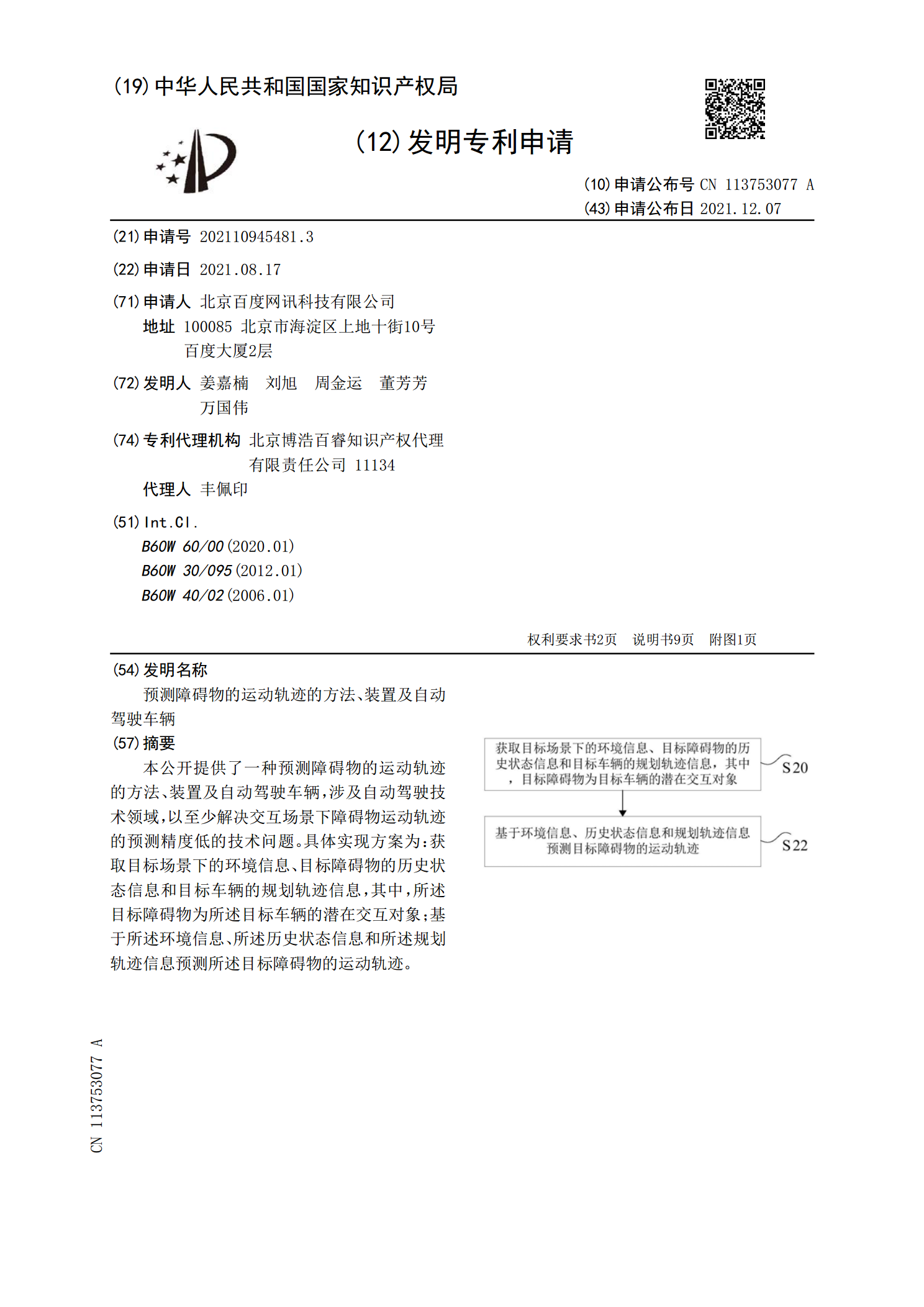
本公开提供了一种预测障碍物的运动轨迹的方法、装置及自动驾驶车辆,涉及自动驾驶技术领域,以至少解决交互场景下障碍物运动轨迹的预测精度低的技术问题。具体实现方案为:获取目标场景下的环境信息、目标障碍物的历史状态信息和目标车辆的规划轨迹信息,其中,所述目标障碍物为所述目标车辆的潜在交互对象;基于所述环境信息、所述历史状态信息和所述规划轨迹信息预测所述目标障碍物的运动轨迹。

车辆检测模型训练方法、设备、存储介质及装置.pdf
本发明公开了一种车辆检测模型训练方法、设备、存储介质及装置,涉及车辆辅助驾驶技术领域。本发明在对车辆终端搭载的车辆检测模型进行训练时,通过教师模型监督学生模型的训练过程,实现迁移学习,在学生模型收敛后,获得车辆检测模型。由于教师模型相比学生模型具有更高的检测精度,从而提高了学生模型的检测精度。同时,也保留了学生模型自身的速度快的优势,使得最终的车辆检测模型能够兼顾速度与精度。从而使得车辆终端在通过车辆检测模型进行识别时,具体较高的速度与精度。