
一种断路器柔性装配机器人的轨迹优化方法.pdf

书生****12

1/10

2/10
3/10

4/10
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共33页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种断路器柔性装配机器人的轨迹优化方法.pdf
本发明涉及一种断路器柔性装配机器人的轨迹优化方法,包括:采用五次多项式对断路器柔性装配机器人的运动轨迹进行插值,获得断路器柔性装配机器人的运动轨迹;五次多项式为断路器柔性装配机器人各关节的位置、运动速度、加速度和加加速度关于时间的函数;基于五次多项式构建出目标函数;采用改进的粒子群算法对目标函数进行优化,对不符合第一约束条件的初始化粒子优化,在计算粒子群的适应度值和确定当前的个体极值及群体极值后,基于开关型的适应度函数对不符合第二约束条件的粒子优化,并重新计算粒子群的适应度值确定当前的个体极值及群体极值,

机器人柔性翻边成形轨迹优化.docx
机器人柔性翻边成形轨迹优化柔性翻边成形是一种常见的金属板材加工工艺,适用于各种复杂几何形状的零件加工。在传统的机器人柔性翻边成形过程中,机器人会按照预定的轨迹进行运动,以实现板材的形状变换。然而,在实际应用中,传统的成形轨迹可能存在一些问题,如成形效果不理想、加工精度低等。因此,优化机器人柔性翻边成形轨迹成为一个具有挑战性的问题。本文旨在探讨机器人柔性翻边成形轨迹的优化方法,从而提高成形效率和加工精度。首先,我们将介绍柔性翻边成形的基本原理和目标。然后,我们将详细讨论机器人柔性翻边成形轨迹优化的研究现状,
一种球形机器人轨迹优化方法.pdf
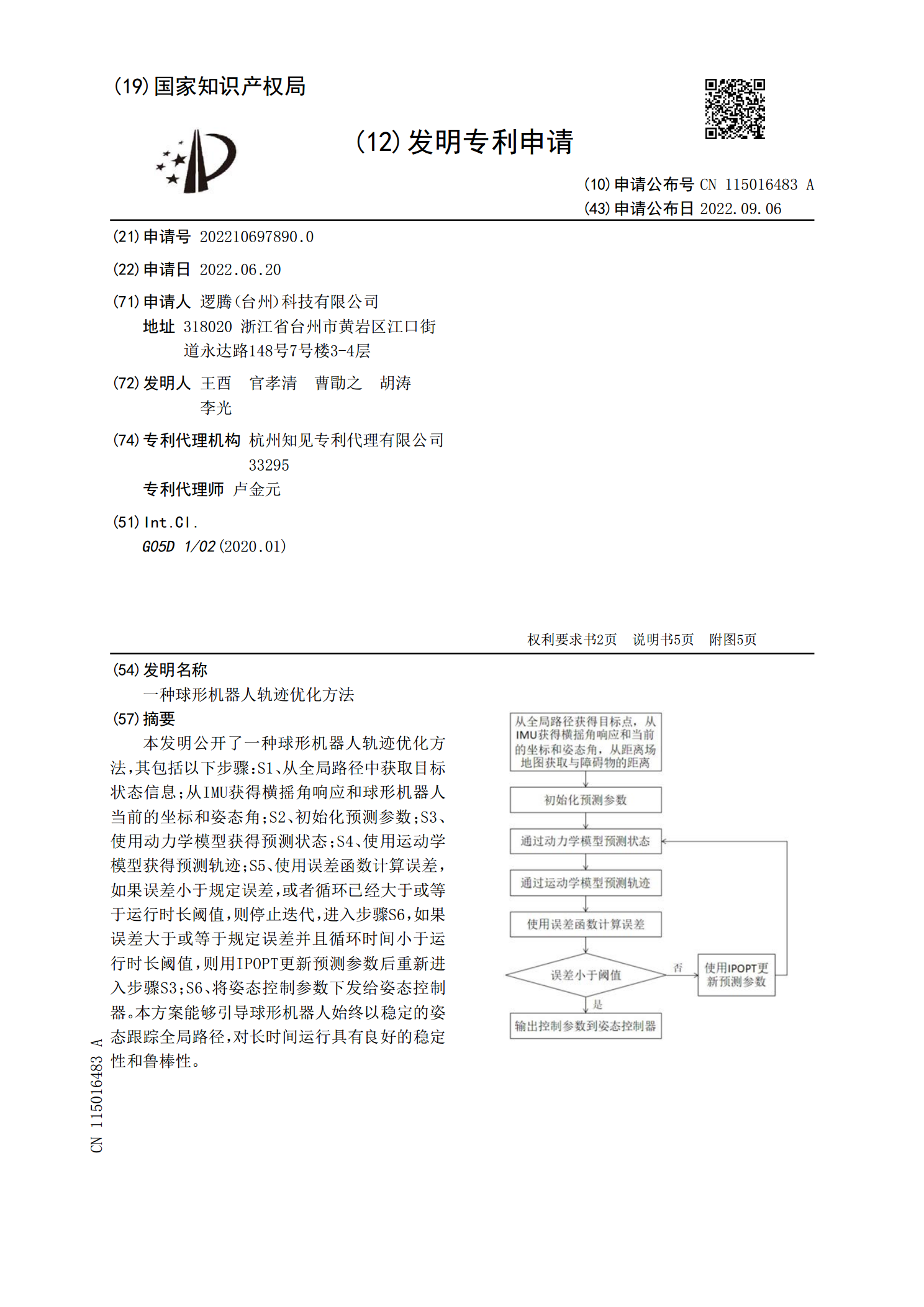
本发明公开了一种球形机器人轨迹优化方法,其包括以下步骤:S1、从全局路径中获取目标状态信息;从IMU获得横摇角响应和球形机器人当前的坐标和姿态角;S2、初始化预测参数;S3、使用动力学模型获得预测状态;S4、使用运动学模型获得预测轨迹;S5、使用误差函数计算误差,如果误差小于规定误差,或者循环已经大于或等于运行时长阈值,则停止迭代,进入步骤S6,如果误差大于或等于规定误差并且循环时间小于运行时长阈值,则用IPOPT更新预测参数后重新进入步骤S3;S6、将姿态控制参数下发给姿态控制器。本方案能够引导球形机器

一种多机器人协同断路器柔性装配单元及其系统.pdf
本发明公开了一种多机器人协同断路器柔性装配单元及其系统,属于断路器装配制造技术领域,单元包括零件分拣工位、位姿调整工位、自动装配工位、上料分盖工位以及成品装配工位;零件分拣工位包括零件分拣载具和零件分拣机器人;位姿调整工位包括位姿调整载具和位姿调整机器人;上料分盖工位包括断路器载具和上料分盖机构;自动装配工位包括自动装配机器人;成品装配工位包括成品装配机器人和成品输送通道。系统包括仓储单元和多机器人协同断路器柔性装配单元,仓储单元包括货架、储物盒、收集盒以及移动机器人。通过多机器人协同的方式,实现断路器从

一种轨迹优化方法、装置及一种机器人.pdf
本发明实施例提供了一种轨迹优化方法、装置及一种机器人,涉及机器人技术领域。在机器人基于预设的全局路径移动的过程中,当机器人的当前位置满足预设优化条件时,首先基于机器人的当前位置,在全局路径中确定指定起点和指定终点;然后,对全局路径中位于指定起点与指定终点之间的路径进行轨迹优化,得到目标路径;之后,控制机器人按照目标路径移动,并在机器人的当前位置满足预设优化条件时,返回基于机器人的当前位置,在全局路径中确定指定起点和指定终点的步骤,直至机器人移动至全局路径的预设终点。与相关技术相比,应用本发明实施例提供的方