
一种轨迹优化方法、装置及一种机器人.pdf

一吃****新冬

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共38页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种轨迹优化方法、装置及一种机器人.pdf
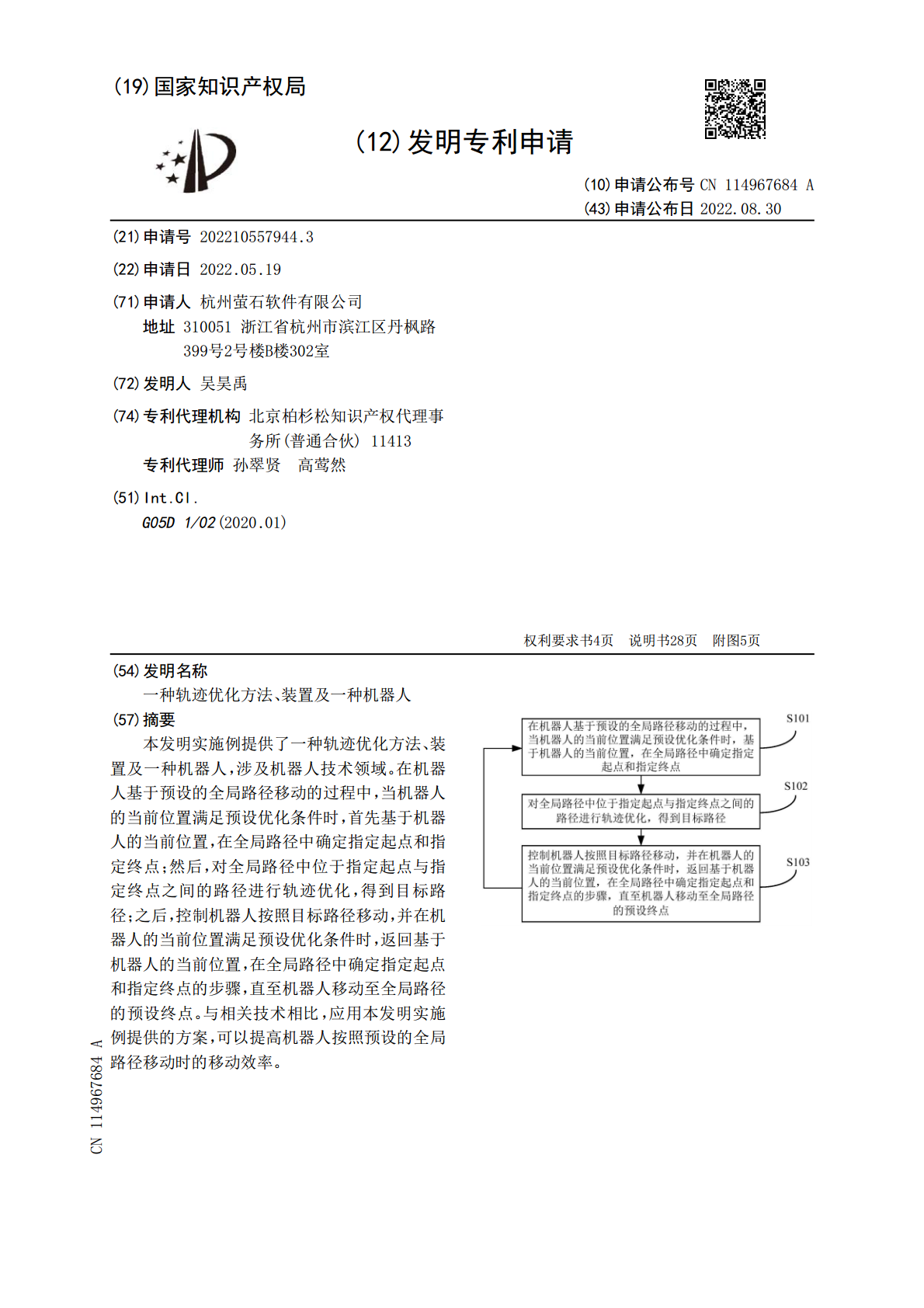
本发明实施例提供了一种轨迹优化方法、装置及一种机器人,涉及机器人技术领域。在机器人基于预设的全局路径移动的过程中,当机器人的当前位置满足预设优化条件时,首先基于机器人的当前位置,在全局路径中确定指定起点和指定终点;然后,对全局路径中位于指定起点与指定终点之间的路径进行轨迹优化,得到目标路径;之后,控制机器人按照目标路径移动,并在机器人的当前位置满足预设优化条件时,返回基于机器人的当前位置,在全局路径中确定指定起点和指定终点的步骤,直至机器人移动至全局路径的预设终点。与相关技术相比,应用本发明实施例提供的方
一种球形机器人轨迹优化方法.pdf
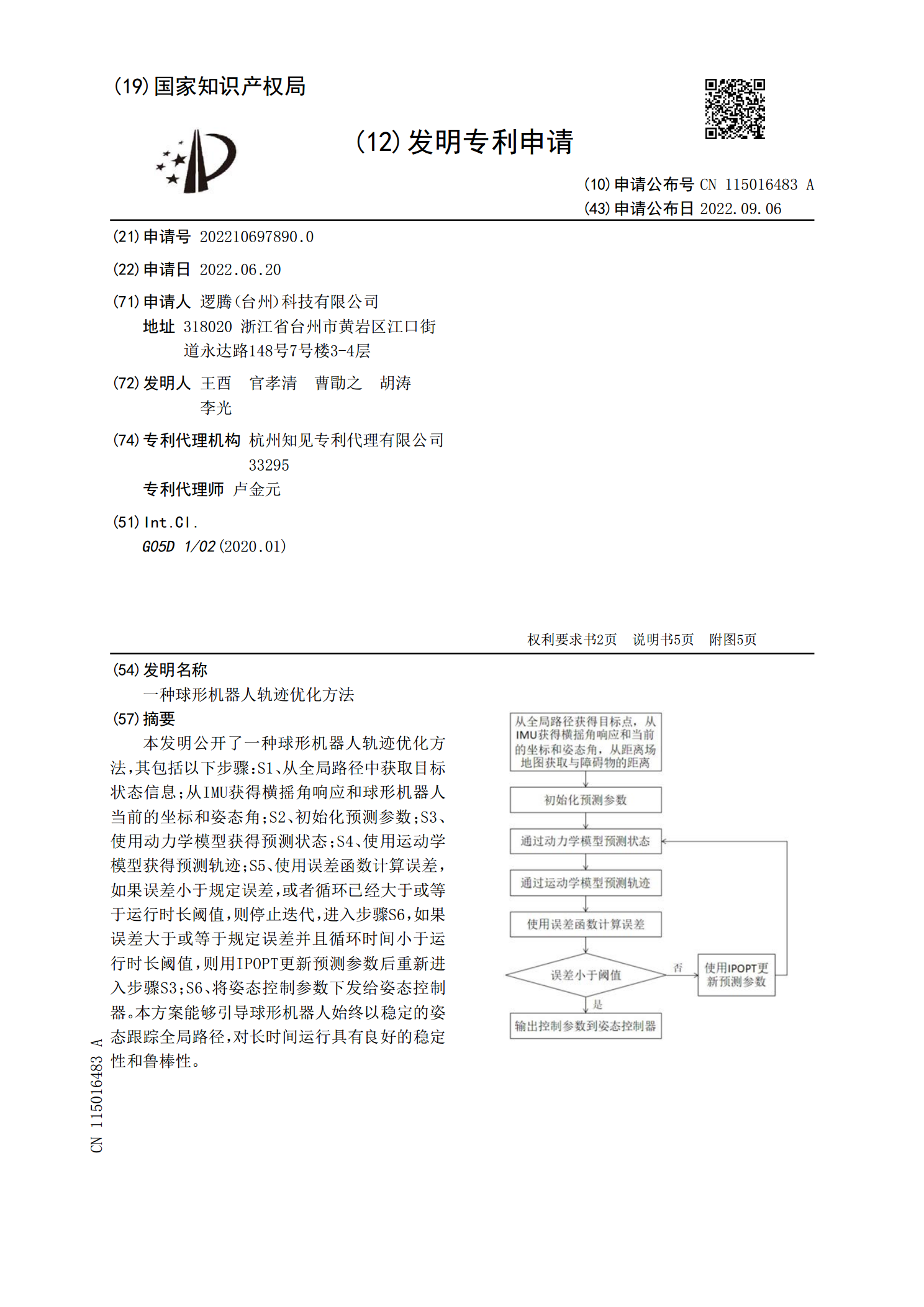
本发明公开了一种球形机器人轨迹优化方法,其包括以下步骤:S1、从全局路径中获取目标状态信息;从IMU获得横摇角响应和球形机器人当前的坐标和姿态角;S2、初始化预测参数;S3、使用动力学模型获得预测状态;S4、使用运动学模型获得预测轨迹;S5、使用误差函数计算误差,如果误差小于规定误差,或者循环已经大于或等于运行时长阈值,则停止迭代,进入步骤S6,如果误差大于或等于规定误差并且循环时间小于运行时长阈值,则用IPOPT更新预测参数后重新进入步骤S3;S6、将姿态控制参数下发给姿态控制器。本方案能够引导球形机器

一种误差可控的机器人轨迹同步优化方法.pdf
本发明提供一种误差可控的机器人轨迹同步优化方法,采用多维轨迹点表示多种机器人轨迹,基于多维轨迹点的定义,建立多维轨迹点的统一运算规则和多维曲线,实现了机器人轨迹的高连续性同步优化,并基于几何迭代法实现了多种类型机器人轨迹的高精度插值,该方法能够提高工业机器人轨迹的精度和工作效率,减少机器人作业时的振动。
一种飞行器飞行轨迹的优化方法及装置.pdf
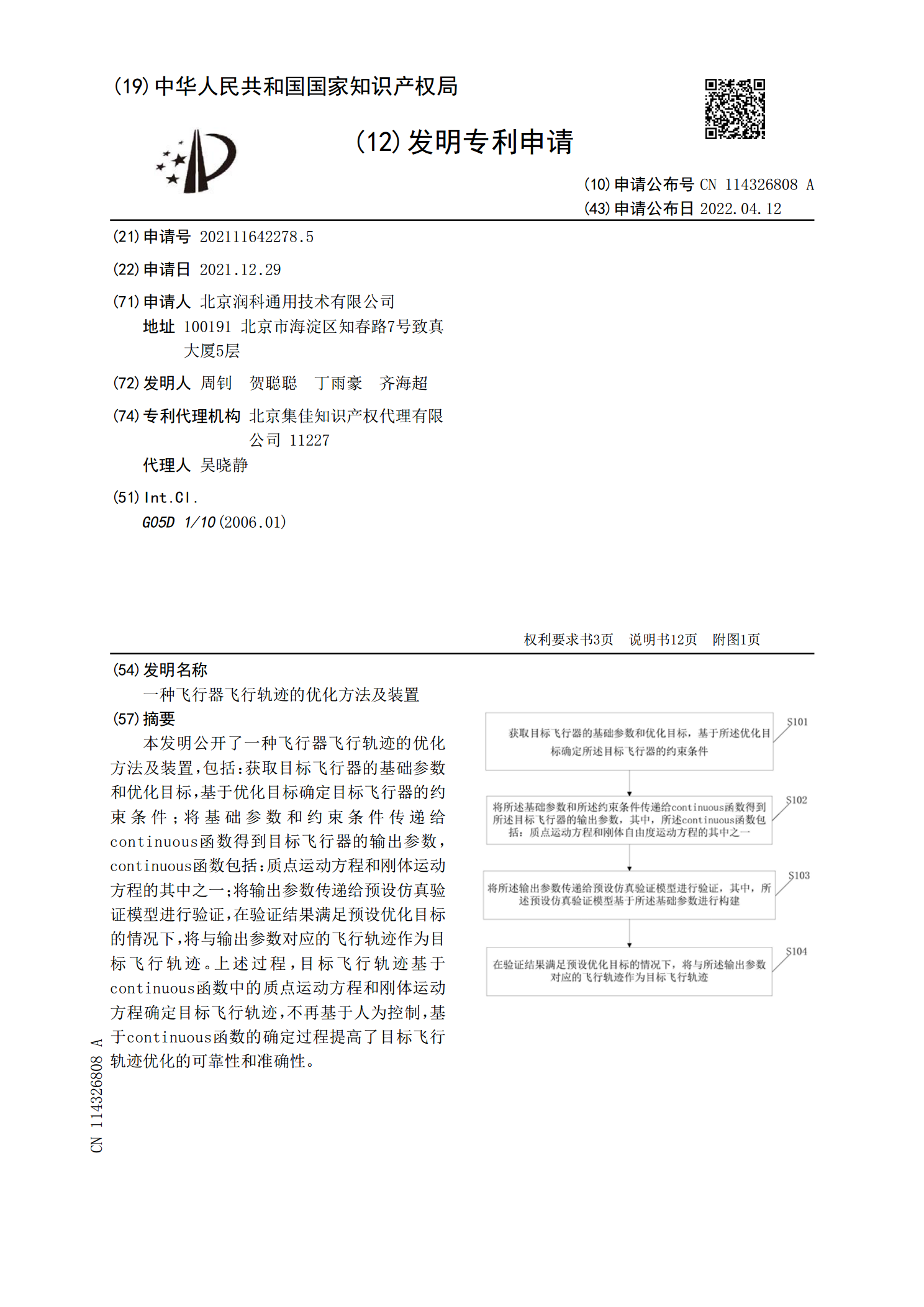
本发明公开了一种飞行器飞行轨迹的优化方法及装置,包括:获取目标飞行器的基础参数和优化目标,基于优化目标确定目标飞行器的约束条件;将基础参数和约束条件传递给continuous函数得到目标飞行器的输出参数,continuous函数包括:质点运动方程和刚体运动方程的其中之一;将输出参数传递给预设仿真验证模型进行验证,在验证结果满足预设优化目标的情况下,将与输出参数对应的飞行轨迹作为目标飞行轨迹。上述过程,目标飞行轨迹基于continuous函数中的质点运动方程和刚体运动方程确定目标飞行轨迹,不再基于人为控制,

一种工业机器人轨迹检测装置.pdf
本发明涉及机器人轨迹检测技术领域,具体涉及一种工业机器人轨迹检测装置,包括工业机器人、法兰盘、第一标准样板、第二标准样板、第三标准样板、第一激光测距传感器、第二激光测距传感器、第三激光测距传感器、三轴加速度传感器、电池、处理器和无线数据传输模块,本发明通过激光测距传感器实时检测工业机器人的手臂所在位置,并且把位置数据传输到检测人员的计算机内进行数据处理而得到工业机器人在三维空间内的位置信息,另外本发明的三轴加速度传感器的可以在工业机器人手臂运动到标准样板外时继续记录其位置信息,解决了现有技术中工业机器人轨