
一种多机器人协同断路器柔性装配单元及其系统.pdf

努力****弘毅

1/10

2/10

3/10
4/10
5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种多机器人协同断路器柔性装配单元及其系统.pdf
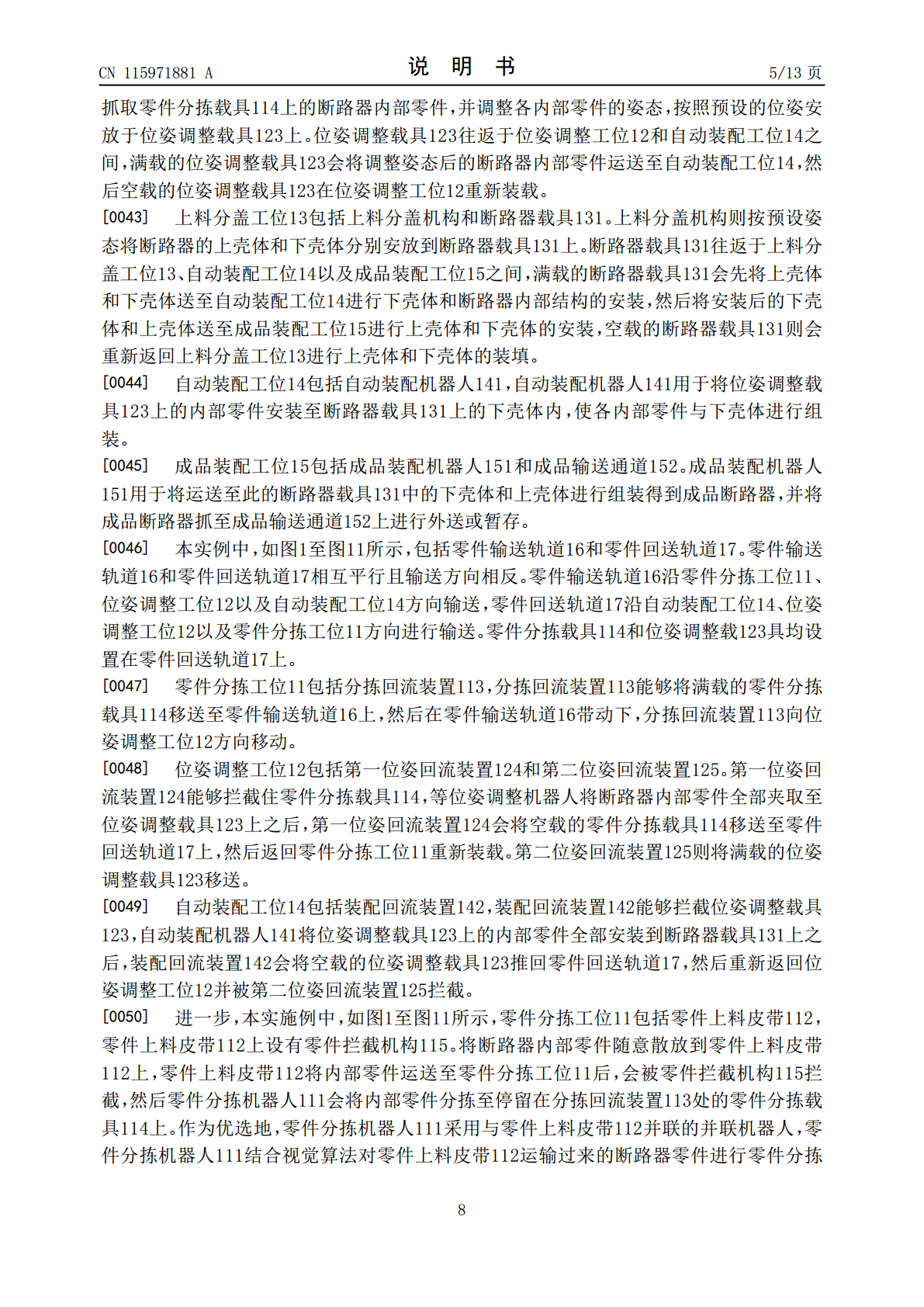
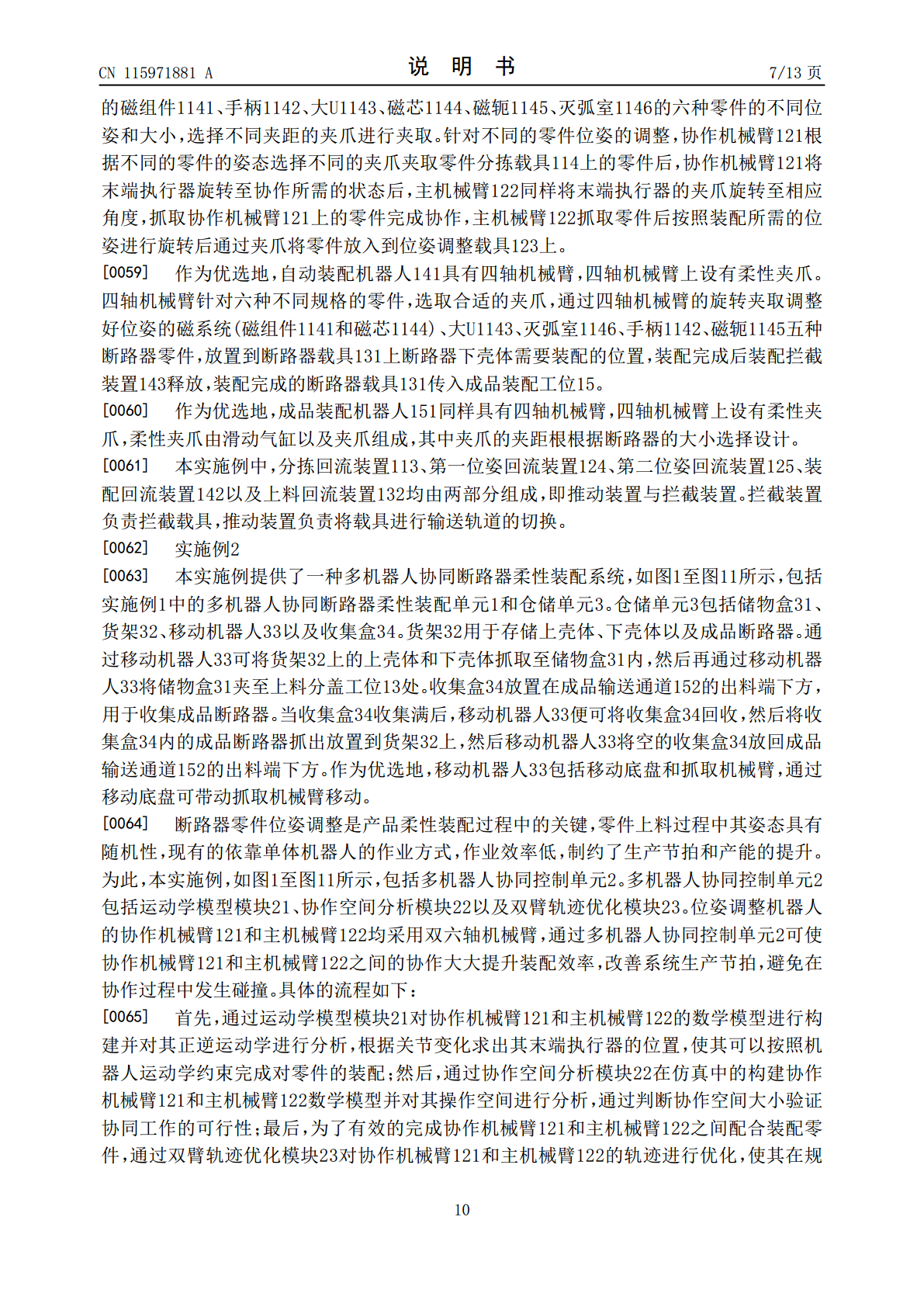
本发明公开了一种多机器人协同断路器柔性装配单元及其系统,属于断路器装配制造技术领域,单元包括零件分拣工位、位姿调整工位、自动装配工位、上料分盖工位以及成品装配工位;零件分拣工位包括零件分拣载具和零件分拣机器人;位姿调整工位包括位姿调整载具和位姿调整机器人;上料分盖工位包括断路器载具和上料分盖机构;自动装配工位包括自动装配机器人;成品装配工位包括成品装配机器人和成品输送通道。系统包括仓储单元和多机器人协同断路器柔性装配单元,仓储单元包括货架、储物盒、收集盒以及移动机器人。通过多机器人协同的方式,实现断路器从

一种断路器柔性装配机器人的轨迹优化方法.pdf
本发明涉及一种断路器柔性装配机器人的轨迹优化方法,包括:采用五次多项式对断路器柔性装配机器人的运动轨迹进行插值,获得断路器柔性装配机器人的运动轨迹;五次多项式为断路器柔性装配机器人各关节的位置、运动速度、加速度和加加速度关于时间的函数;基于五次多项式构建出目标函数;采用改进的粒子群算法对目标函数进行优化,对不符合第一约束条件的初始化粒子优化,在计算粒子群的适应度值和确定当前的个体极值及群体极值后,基于开关型的适应度函数对不符合第二约束条件的粒子优化,并重新计算粒子群的适应度值确定当前的个体极值及群体极值,

一种智能多机器人协同测图系统及其方法.pdf
本发明公开了一种智能多机器人协同测图系统,其中该系统包括数据采集模块,点云匹配模块,协同SLAM模块;数据采集模块将机器人携带的激光雷达采集到的数据进行处理,提取其中的线点和面点特征点,以及这些点的最近邻点,作为特征数据点输出到点云匹配模块;点云匹配模块将得到的不同机器人的特征数据点之间进行点云匹配,如果可以匹配则建立起机器人之间的对应联系,并将联系关系传输到协同SLAM模块,如果不可以匹配则暂时保留下姿态矩阵(6—DOE);协同SLAM模块根据前面的点云匹配模块,如果已经有闭包,那么就按照机器人之间的关

小型断路器柔性装配中视觉识别系统的设计与应用.docx
小型断路器柔性装配中视觉识别系统的设计与应用AbstractInthispaper,weproposethedesignandapplicationofavisionrecognitionsystemforflexibleassemblyofminiaturecircuitbreakers.Thesystemisbasedonmachinevisiontechnologyandusesahigh-resolutioncameratocaptureimagesoftheassemblyprocessinre
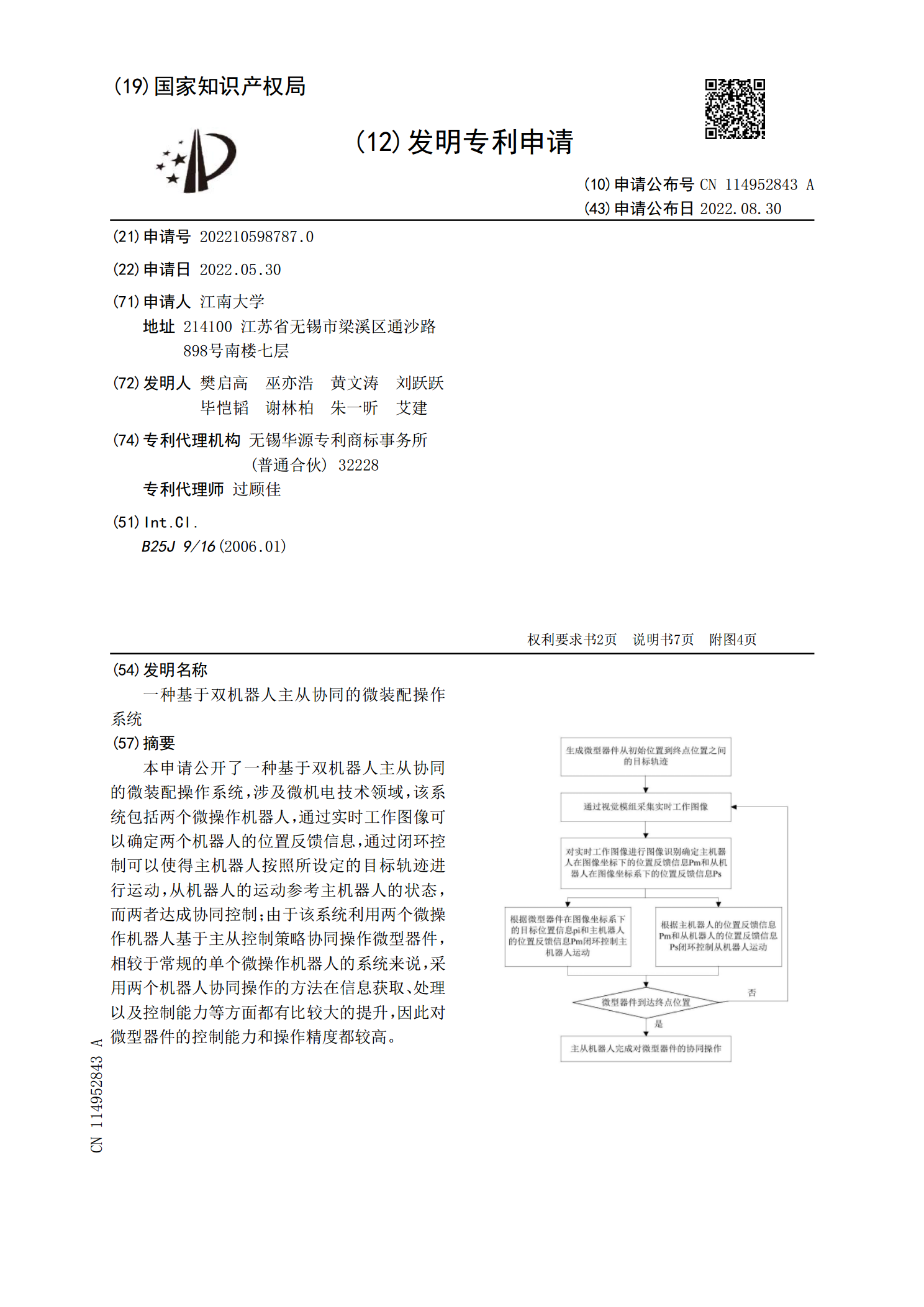
一种基于双机器人主从协同的微装配操作系统.pdf
本申请公开了一种基于双机器人主从协同的微装配操作系统,涉及微机电技术领域,该系统包括两个微操作机器人,通过实时工作图像可以确定两个机器人的位置反馈信息,通过闭环控制可以使得主机器人按照所设定的目标轨迹进行运动,从机器人的运动参考主机器人的状态,而两者达成协同控制;由于该系统利用两个微操作机器人基于主从控制策略协同操作微型器件,相较于常规的单个微操作机器人的系统来说,采用两个机器人协同操作的方法在信息获取、处理以及控制能力等方面都有比较大的提升,因此对微型器件的控制能力和操作精度都较高。