
一种球形机器人轨迹优化方法.pdf

念珊****写意

1/10

2/10
3/10

4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种球形机器人轨迹优化方法.pdf
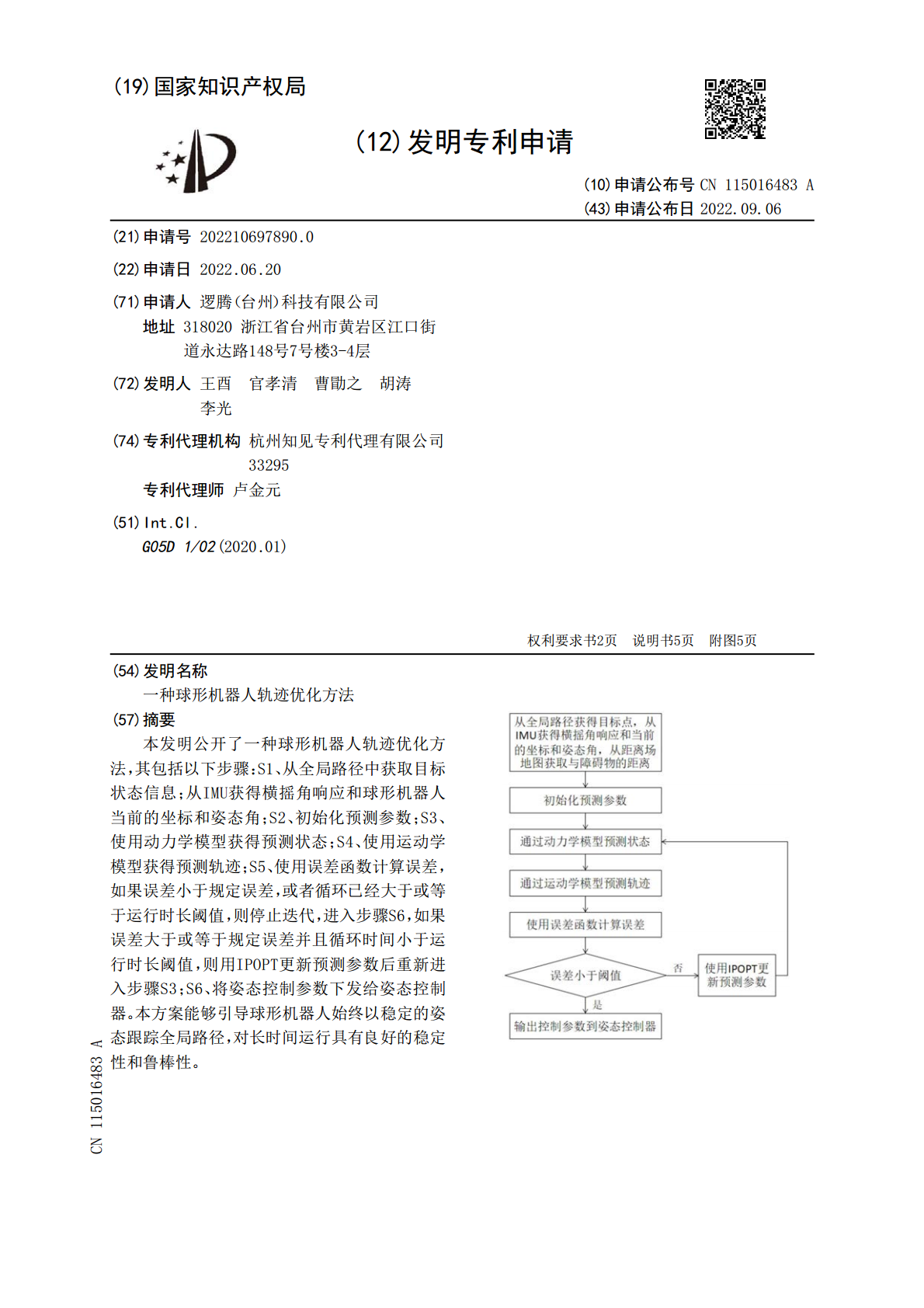
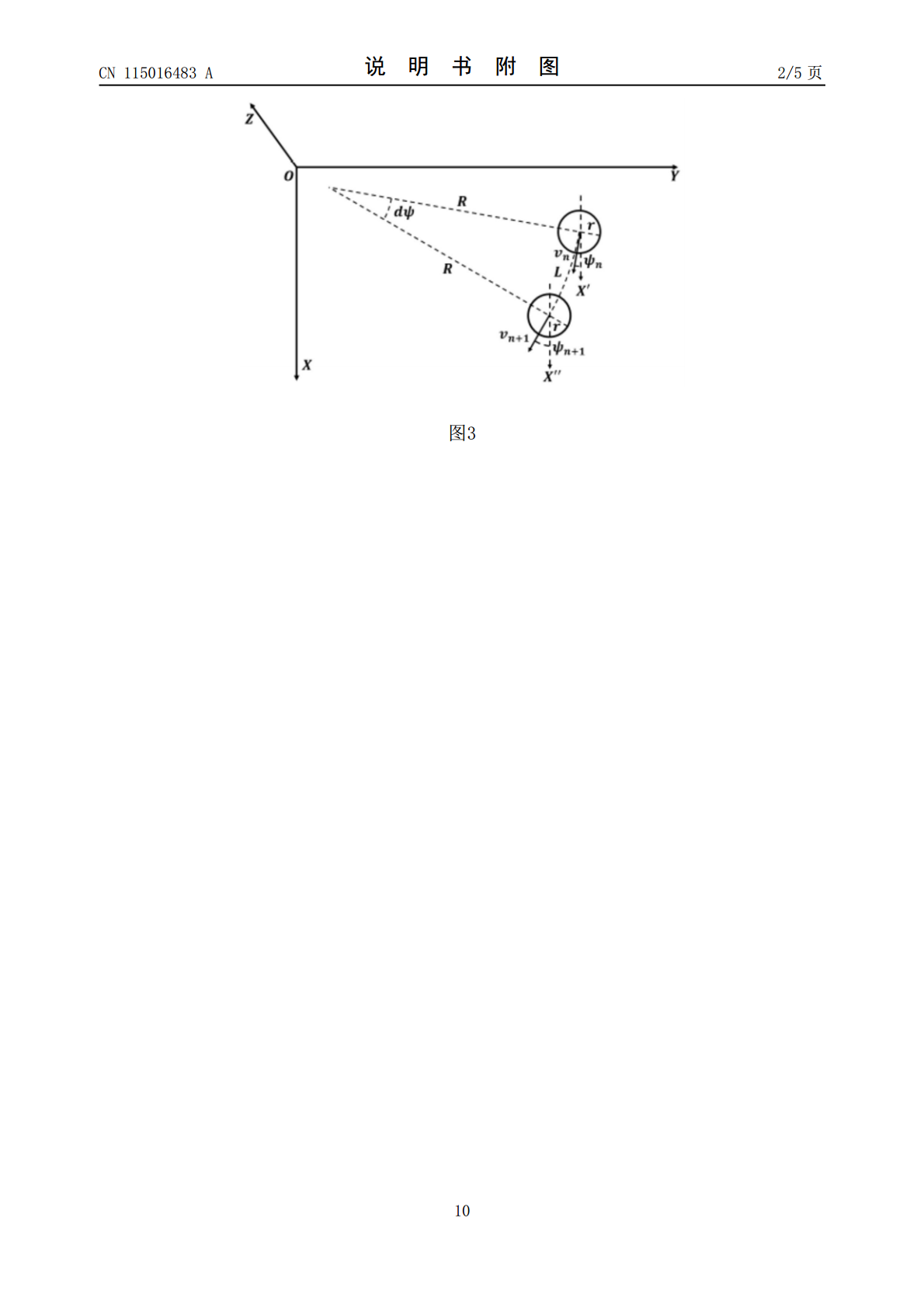
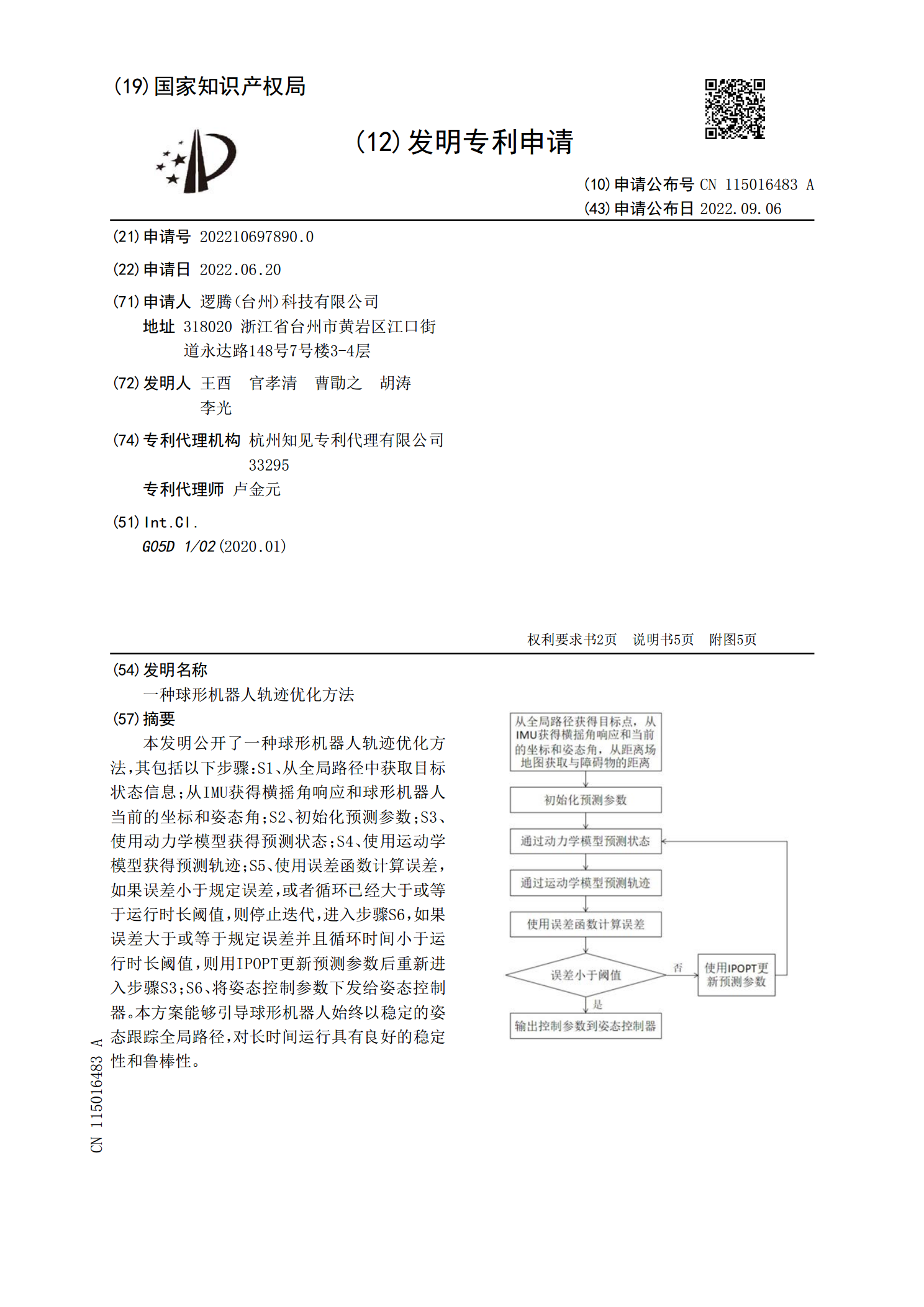
本发明公开了一种球形机器人轨迹优化方法,其包括以下步骤:S1、从全局路径中获取目标状态信息;从IMU获得横摇角响应和球形机器人当前的坐标和姿态角;S2、初始化预测参数;S3、使用动力学模型获得预测状态;S4、使用运动学模型获得预测轨迹;S5、使用误差函数计算误差,如果误差小于规定误差,或者循环已经大于或等于运行时长阈值,则停止迭代,进入步骤S6,如果误差大于或等于规定误差并且循环时间小于运行时长阈值,则用IPOPT更新预测参数后重新进入步骤S3;S6、将姿态控制参数下发给姿态控制器。本方案能够引导球形机器

一种轨迹优化方法、装置及一种机器人.pdf
本发明实施例提供了一种轨迹优化方法、装置及一种机器人,涉及机器人技术领域。在机器人基于预设的全局路径移动的过程中,当机器人的当前位置满足预设优化条件时,首先基于机器人的当前位置,在全局路径中确定指定起点和指定终点;然后,对全局路径中位于指定起点与指定终点之间的路径进行轨迹优化,得到目标路径;之后,控制机器人按照目标路径移动,并在机器人的当前位置满足预设优化条件时,返回基于机器人的当前位置,在全局路径中确定指定起点和指定终点的步骤,直至机器人移动至全局路径的预设终点。与相关技术相比,应用本发明实施例提供的方

一种误差可控的机器人轨迹同步优化方法.pdf
本发明提供一种误差可控的机器人轨迹同步优化方法,采用多维轨迹点表示多种机器人轨迹,基于多维轨迹点的定义,建立多维轨迹点的统一运算规则和多维曲线,实现了机器人轨迹的高连续性同步优化,并基于几何迭代法实现了多种类型机器人轨迹的高精度插值,该方法能够提高工业机器人轨迹的精度和工作效率,减少机器人作业时的振动。

一种断路器柔性装配机器人的轨迹优化方法.pdf
本发明涉及一种断路器柔性装配机器人的轨迹优化方法,包括:采用五次多项式对断路器柔性装配机器人的运动轨迹进行插值,获得断路器柔性装配机器人的运动轨迹;五次多项式为断路器柔性装配机器人各关节的位置、运动速度、加速度和加加速度关于时间的函数;基于五次多项式构建出目标函数;采用改进的粒子群算法对目标函数进行优化,对不符合第一约束条件的初始化粒子优化,在计算粒子群的适应度值和确定当前的个体极值及群体极值后,基于开关型的适应度函数对不符合第二约束条件的粒子优化,并重新计算粒子群的适应度值确定当前的个体极值及群体极值,

一种机器人轨迹规划方法.pdf
本发明属于机器人在线测量轨迹规划技术领域,具体涉及一种机器人轨迹规划方法。该方法首先得到关节轨迹序列。然后采用遗传算法求解目标函数,得到最优关节轨迹点时间间隔序列。确定适应度值的过程包括:若两个个体均在约束函数的可行域范围内或者随机生成的参数小于设定调整参数,则通过目标函数来判断两个个体的优劣,否则通过约束函数来判断两个个体的优劣;对种群中所有个体的优劣进行排序,根据排序结果赋予每个个体的适应度值。最后确定连续的关节轨迹。本发明引入随机排序算法来改进遗传算法中适应度值的计算,可有效平衡目标函数值与约束函数