
轨迹确定方法、装置、电子设备及计算机可读存储介质.pdf

志信****pp

1/10
2/10
3/10
4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轨迹确定方法、装置、电子设备及计算机可读存储介质.pdf
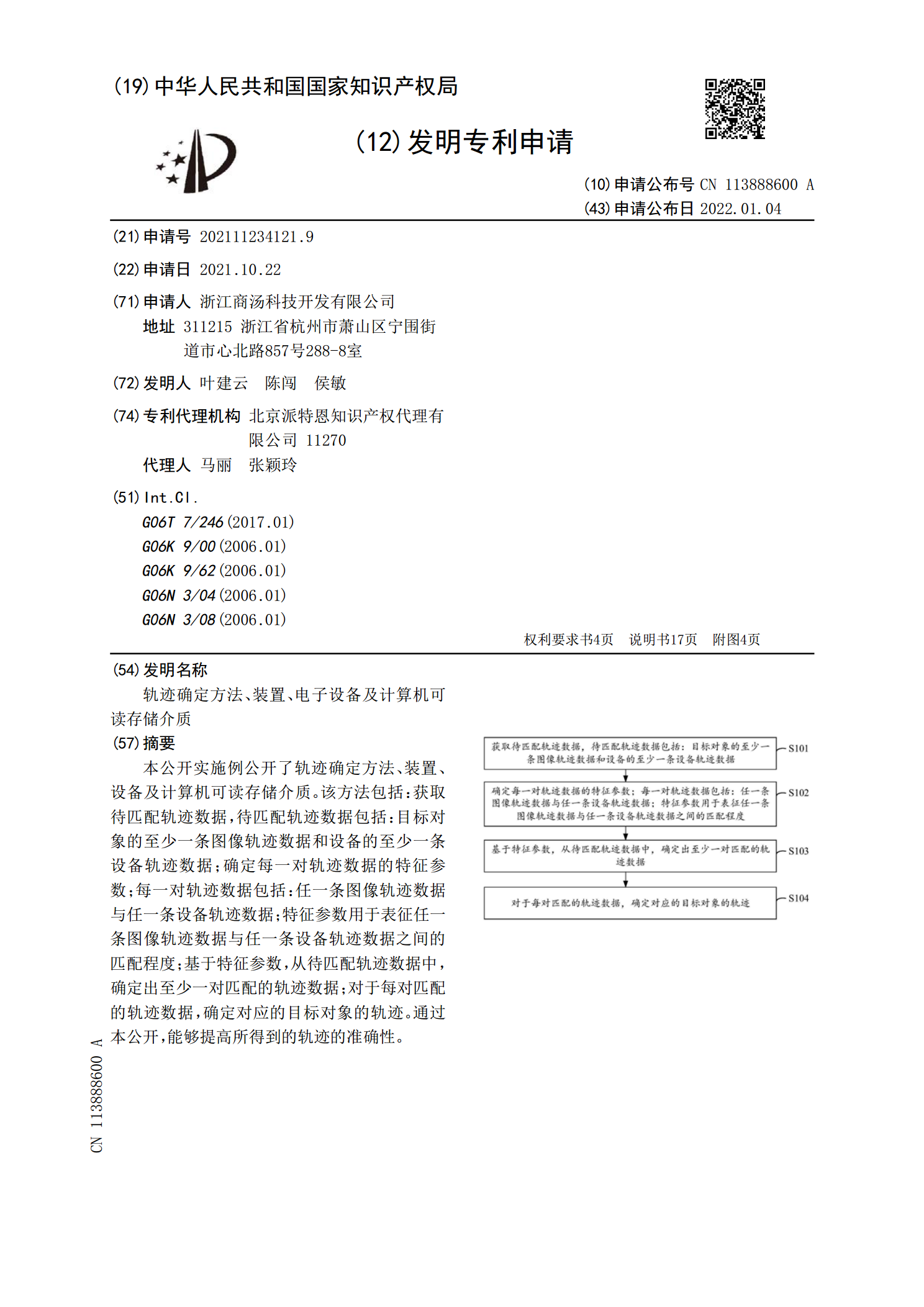
本公开实施例公开了轨迹确定方法、装置、设备及计算机可读存储介质。该方法包括:获取待匹配轨迹数据,待匹配轨迹数据包括:目标对象的至少一条图像轨迹数据和设备的至少一条设备轨迹数据;确定每一对轨迹数据的特征参数;每一对轨迹数据包括:任一条图像轨迹数据与任一条设备轨迹数据;特征参数用于表征任一条图像轨迹数据与任一条设备轨迹数据之间的匹配程度;基于特征参数,从待匹配轨迹数据中,确定出至少一对匹配的轨迹数据;对于每对匹配的轨迹数据,确定对应的目标对象的轨迹。通过本公开,能够提高所得到的轨迹的准确性。

轨迹预测方法、装置、电子设备及计算机可读存储介质.pdf
本申请涉及一种轨迹预测方法、装置、电子设备及计算机可读存储介质,涉及计算机技术领域,该方法包括:获取预测目标对应的语义地图以及预测目标对应的历史观测轨迹序列,历史观测轨迹序列表征预测目标在各个历史时刻的轨迹位置,然后对预测目标对应的历史观测轨迹序列进行序列编码表示,得到序列编码特征,以及基于预测目标对应的语义地图,生成语义地图对应函数表示,语义地图对应的函数表示表征语义与轨迹位置之间的映射关系,然后基于序列编码特征并通过语义地图对应的函数表示进行轨迹预测,得到未来预测轨迹序列。本申请涉及一种轨迹预测方法、
确定行驶轨迹的方法、装置、电子设备及存储介质.pdf
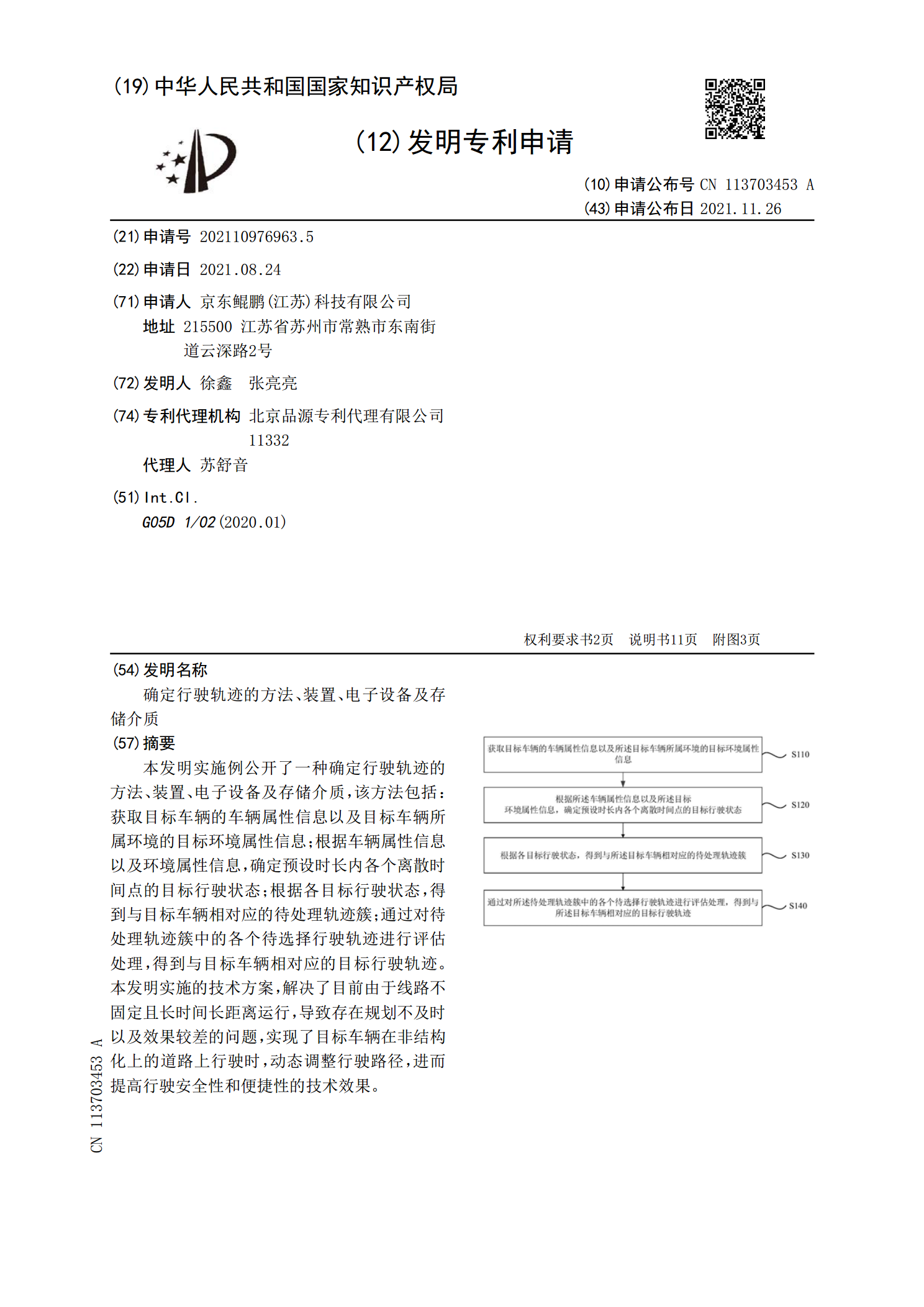
本发明实施例公开了一种确定行驶轨迹的方法、装置、电子设备及存储介质,该方法包括:获取目标车辆的车辆属性信息以及目标车辆所属环境的目标环境属性信息;根据车辆属性信息以及环境属性信息,确定预设时长内各个离散时间点的目标行驶状态;根据各目标行驶状态,得到与目标车辆相对应的待处理轨迹簇;通过对待处理轨迹簇中的各个待选择行驶轨迹进行评估处理,得到与目标车辆相对应的目标行驶轨迹。本发明实施的技术方案,解决了目前由于线路不固定且长时间长距离运行,导致存在规划不及时以及效果较差的问题,实现了目标车辆在非结构化上的道路上行

转速确定方法、装置、电子设备及计算机可读存储介质.pdf
本申请提供一种转速确定方法、装置、电子设备及计算机可读存储介质,其中方法包括:获取目标旋转体对应的振动信号组;振动信号组中包括目标旋转体上多个目标位置处的振动信号;对振动信号组进行盲源分离,得到多个振动源信号;从多个振动源信号中确定转频源信号;转频源信号与目标旋转体的转频相关;根据转频源信号,确定目标旋转体的转速。本申请提供的转速确定方法,通过对采集的目标旋转体的振动信号组进行盲源分离,可以很好的消除单通道振动信号中转频临近频域内存在的噪声成分,得到与目标旋转体的转频高度相关的转频源信号,从而后续利用该转
故障确定方法及装置、电子设备和计算机可读存储介质.pdf
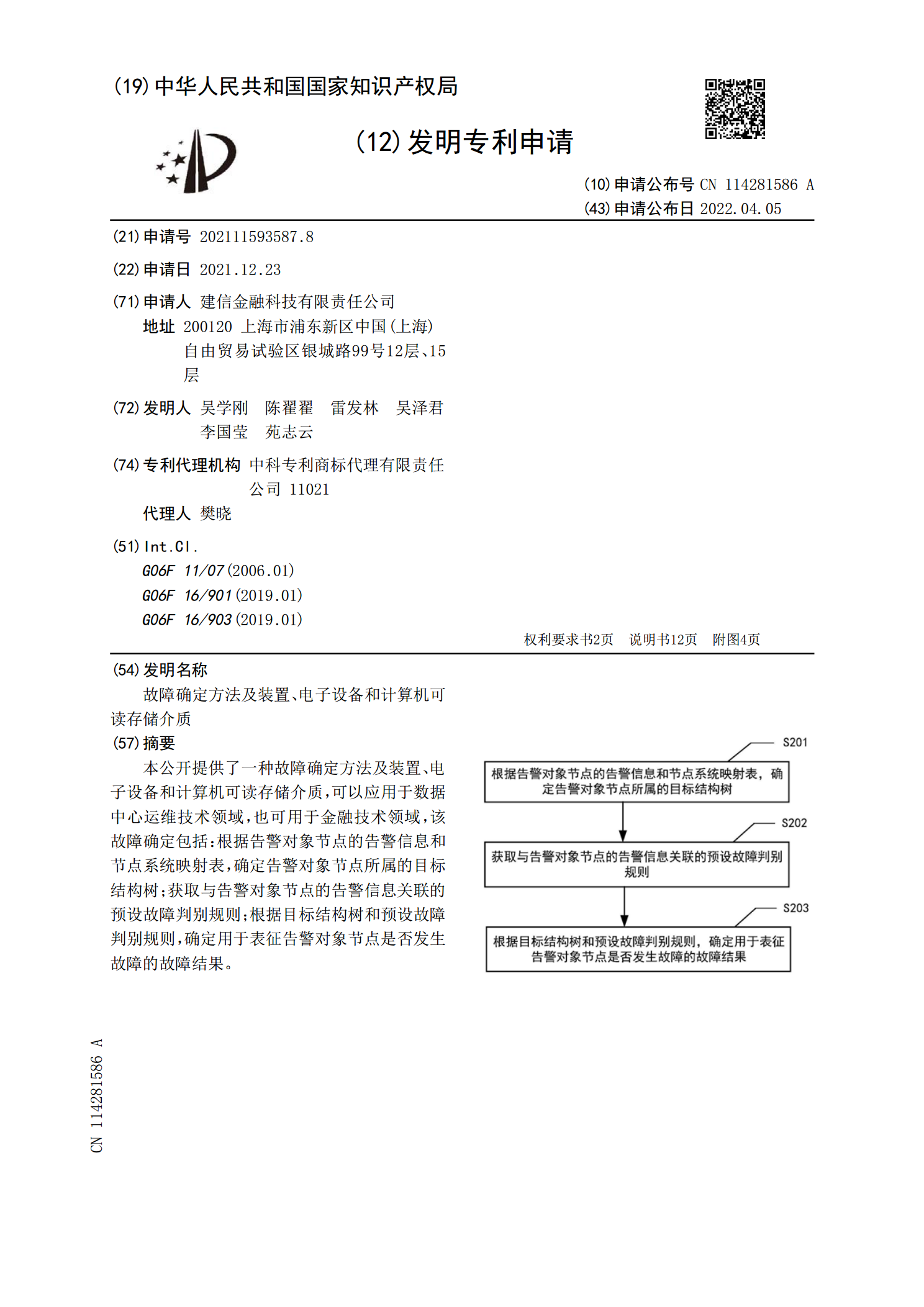
本公开提供了一种故障确定方法及装置、电子设备和计算机可读存储介质,可以应用于数据中心运维技术领域,也可用于金融技术领域,该故障确定包括:根据告警对象节点的告警信息和节点系统映射表,确定告警对象节点所属的目标结构树;获取与告警对象节点的告警信息关联的预设故障判别规则;根据目标结构树和预设故障判别规则,确定用于表征告警对象节点是否发生故障的故障结果。