
目标轨迹预测方法、电子设备及存储介质.pdf

是笛****加盟


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

目标轨迹预测方法、电子设备及存储介质.pdf
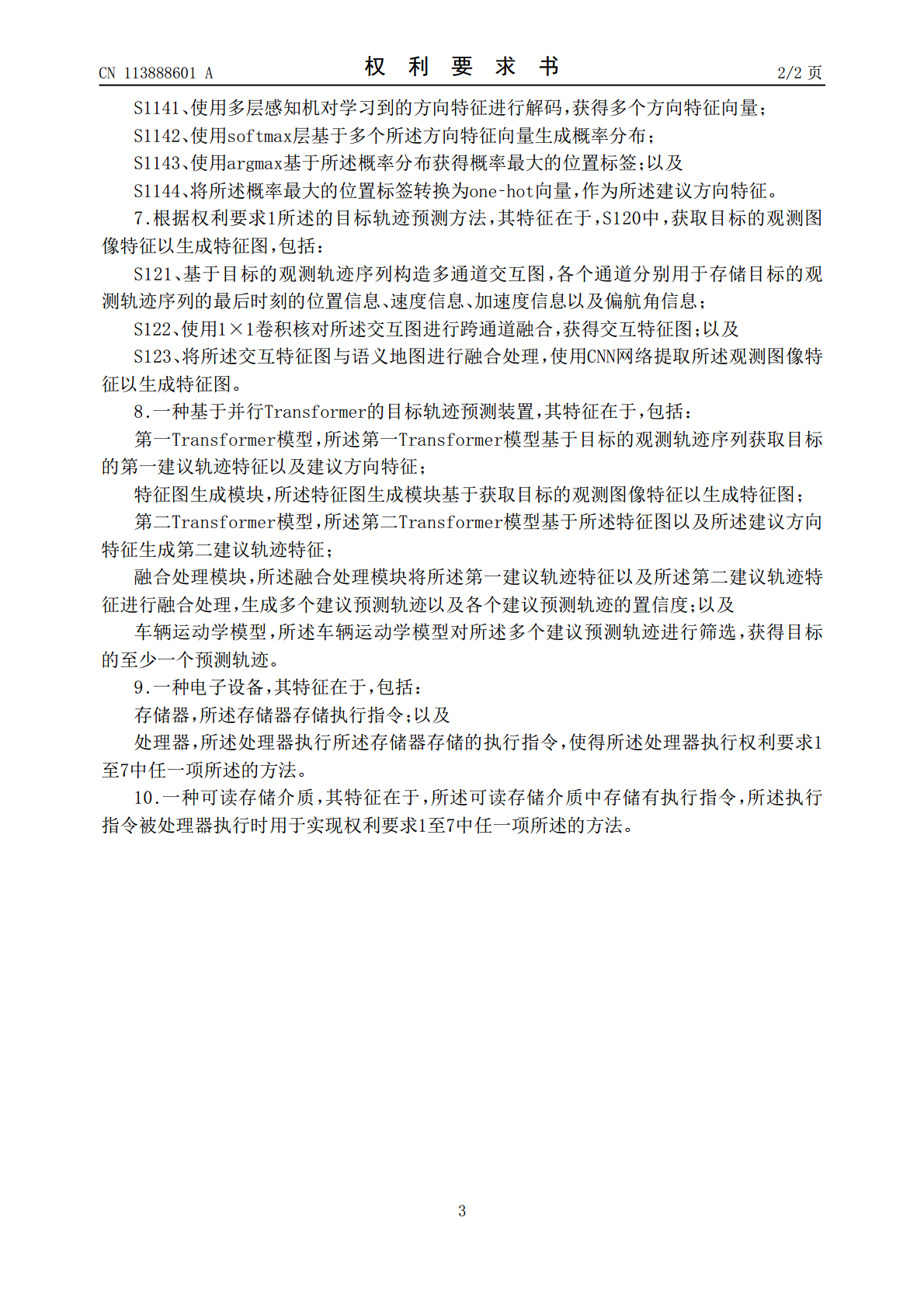
本公开提供了一种基于并行Transformer的目标轨迹预测方法,包括:使用第一Transformer模型基于目标的观测轨迹序列获取目标的第一建议轨迹特征以及建议方向特征;获取目标的观测图像特征以生成特征图,使用第二Transformer模型基于特征图以及建议方向特征生成第二建议轨迹特征;将第一建议轨迹特征以及第二建议轨迹特征进行融合处理,生成多个建议预测轨迹以及各个建议预测轨迹的置信度;以及基于车辆运动学模型对多个建议预测轨迹进行筛选,获得目标的至少一个预测轨迹。本公开还提供了一种基于并行Transfo
目标行人轨迹预测方法、装置、电子设备及存储介质.pdf
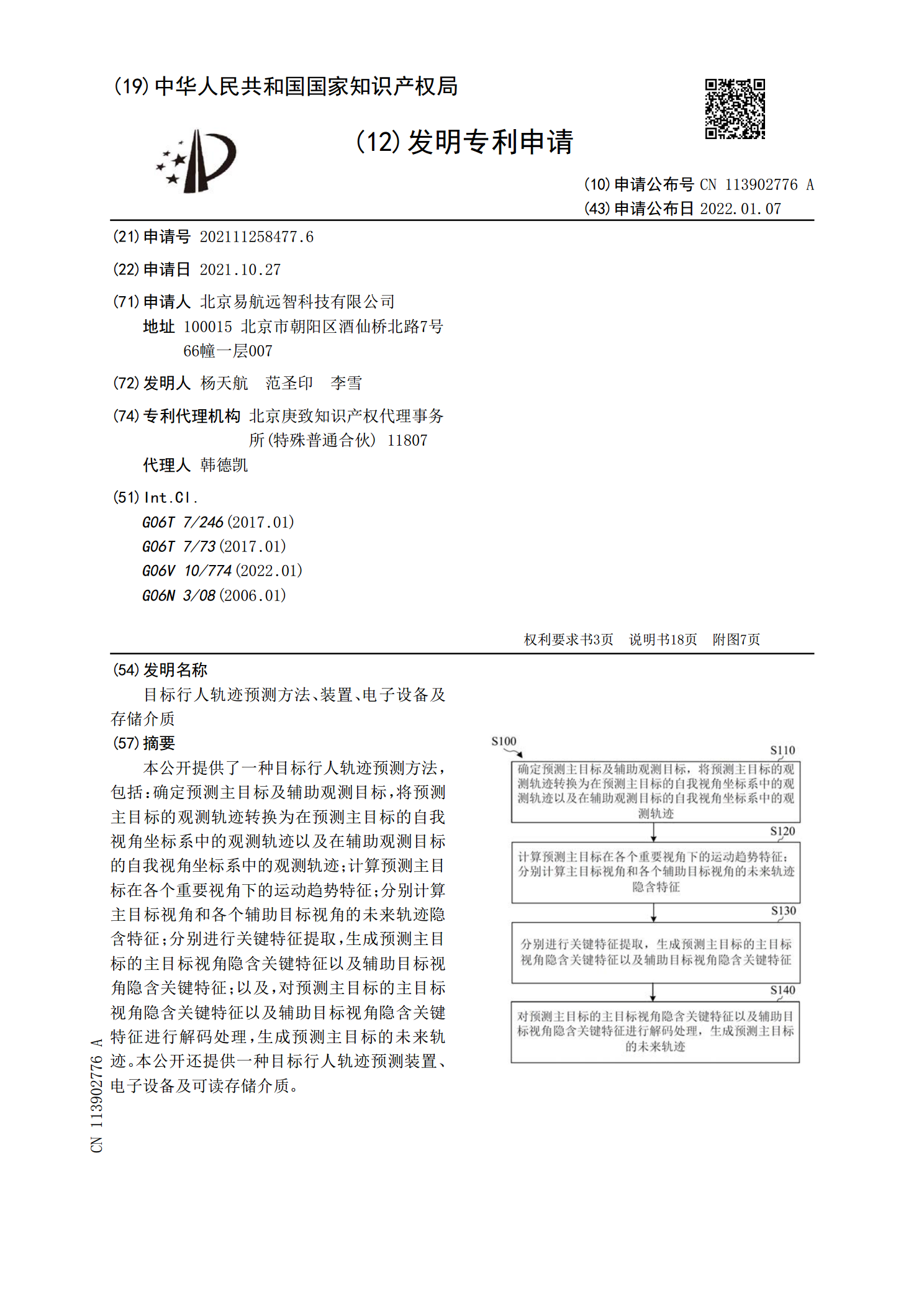
本公开提供了一种目标行人轨迹预测方法,包括:确定预测主目标及辅助观测目标,将预测主目标的观测轨迹转换为在预测主目标的自我视角坐标系中的观测轨迹以及在辅助观测目标的自我视角坐标系中的观测轨迹;计算预测主目标在各个重要视角下的运动趋势特征;分别计算主目标视角和各个辅助目标视角的未来轨迹隐含特征;分别进行关键特征提取,生成预测主目标的主目标视角隐含关键特征以及辅助目标视角隐含关键特征;以及,对预测主目标的主目标视角隐含关键特征以及辅助目标视角隐含关键特征进行解码处理,生成预测主目标的未来轨迹。本公开还提供一种目
轨迹预测方法、装置、电子设备及存储介质.pdf
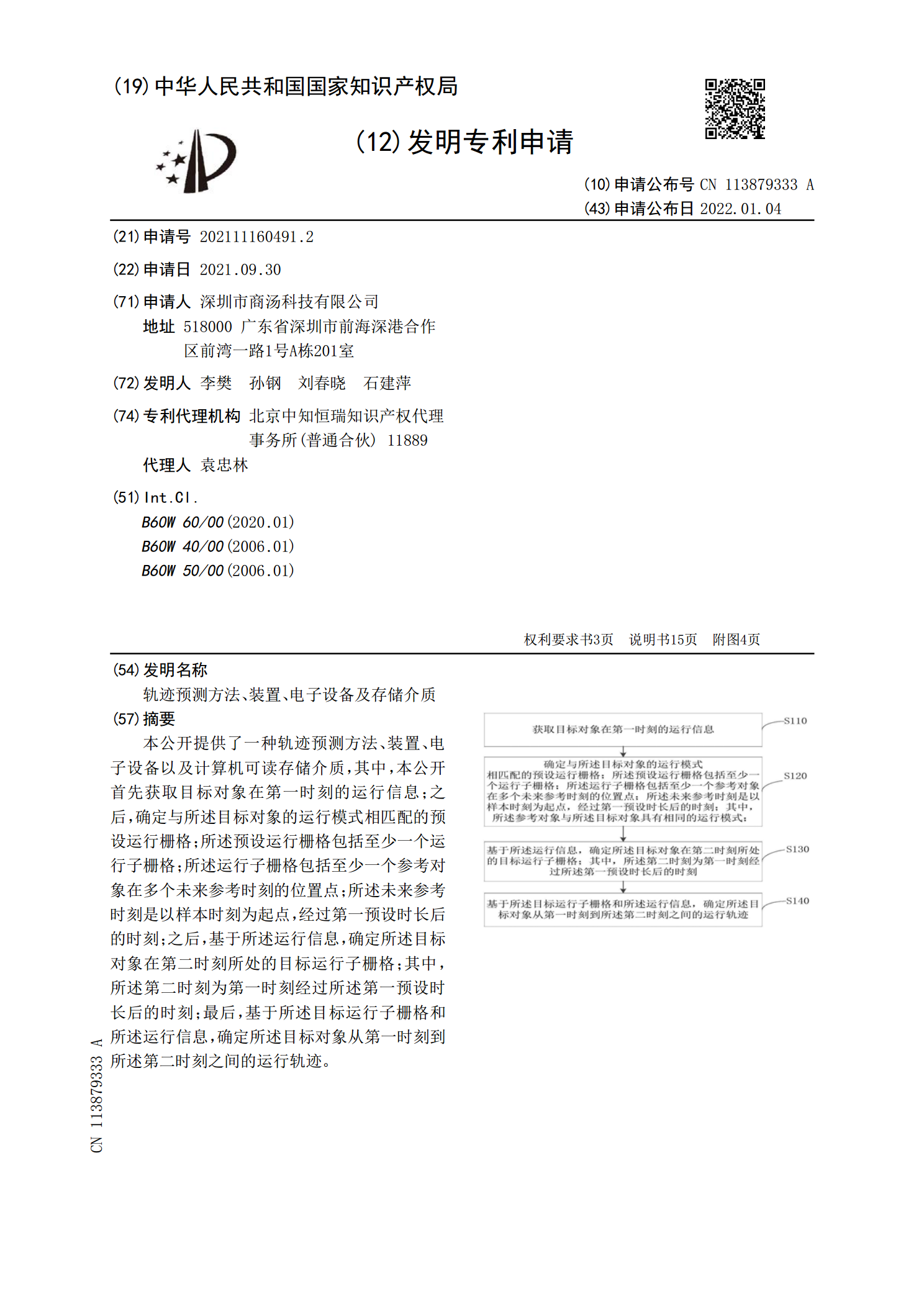
本公开提供了一种轨迹预测方法、装置、电子设备以及计算机可读存储介质,其中,本公开首先获取目标对象在第一时刻的运行信息;之后,确定与所述目标对象的运行模式相匹配的预设运行栅格;所述预设运行栅格包括至少一个运行子栅格;所述运行子栅格包括至少一个参考对象在多个未来参考时刻的位置点;所述未来参考时刻是以样本时刻为起点,经过第一预设时长后的时刻;之后,基于所述运行信息,确定所述目标对象在第二时刻所处的目标运行子栅格;其中,所述第二时刻为第一时刻经过所述第一预设时长后的时刻;最后,基于所述目标运行子栅格和所述运行信息
目标轨迹追踪方法及装置、存储介质、电子设备.pdf
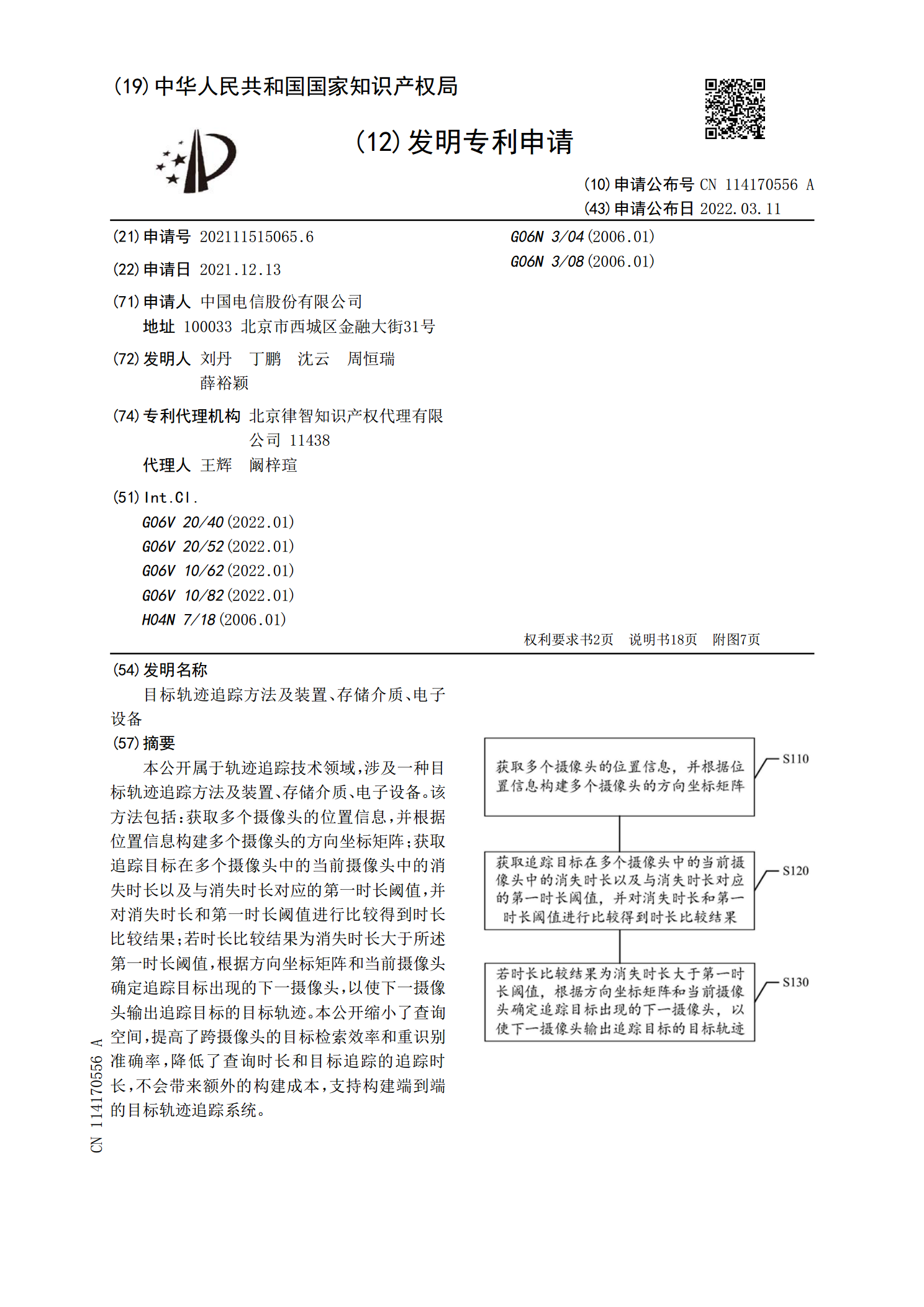
本公开属于轨迹追踪技术领域,涉及一种目标轨迹追踪方法及装置、存储介质、电子设备。该方法包括:获取多个摄像头的位置信息,并根据位置信息构建多个摄像头的方向坐标矩阵;获取追踪目标在多个摄像头中的当前摄像头中的消失时长以及与消失时长对应的第一时长阈值,并对消失时长和第一时长阈值进行比较得到时长比较结果;若时长比较结果为消失时长大于所述第一时长阈值,根据方向坐标矩阵和当前摄像头确定追踪目标出现的下一摄像头,以使下一摄像头输出追踪目标的目标轨迹。本公开缩小了查询空间,提高了跨摄像头的目标检索效率和重识别准确率,降低
车辆轨迹预测方法、装置、电子设备及存储介质.pdf
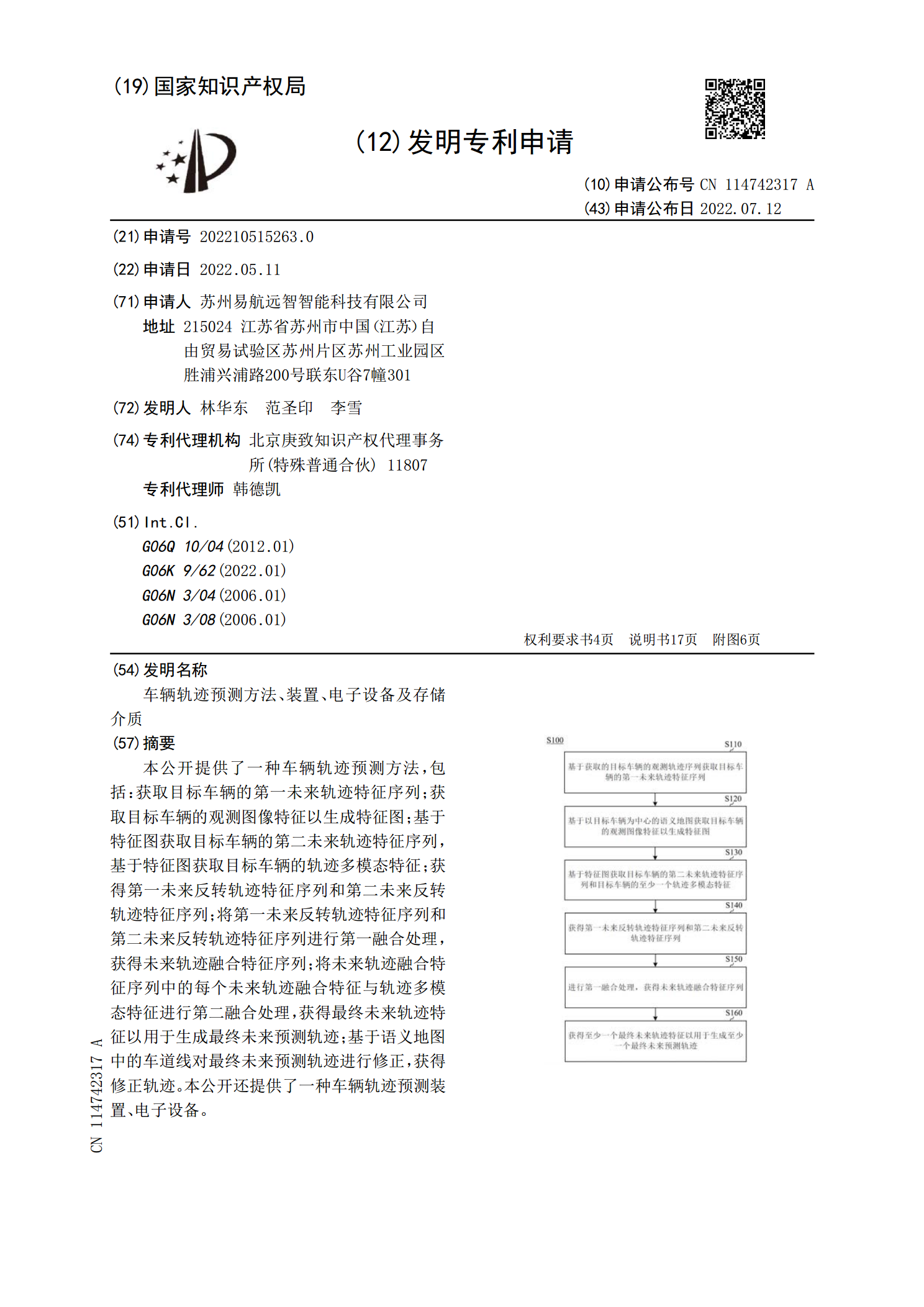
本公开提供了一种车辆轨迹预测方法,包括:获取目标车辆的第一未来轨迹特征序列;获取目标车辆的观测图像特征以生成特征图;基于特征图获取目标车辆的第二未来轨迹特征序列,基于特征图获取目标车辆的轨迹多模态特征;获得第一未来反转轨迹特征序列和第二未来反转轨迹特征序列;将第一未来反转轨迹特征序列和第二未来反转轨迹特征序列进行第一融合处理,获得未来轨迹融合特征序列;将未来轨迹融合特征序列中的每个未来轨迹融合特征与轨迹多模态特征进行第二融合处理,获得最终未来轨迹特征以用于生成最终未来预测轨迹;基于语义地图中的车道线对最终