
机器人行驶控制方法、装置、机器人和存储介质.pdf

睿达****的的

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人行驶控制方法、装置、机器人和存储介质.pdf
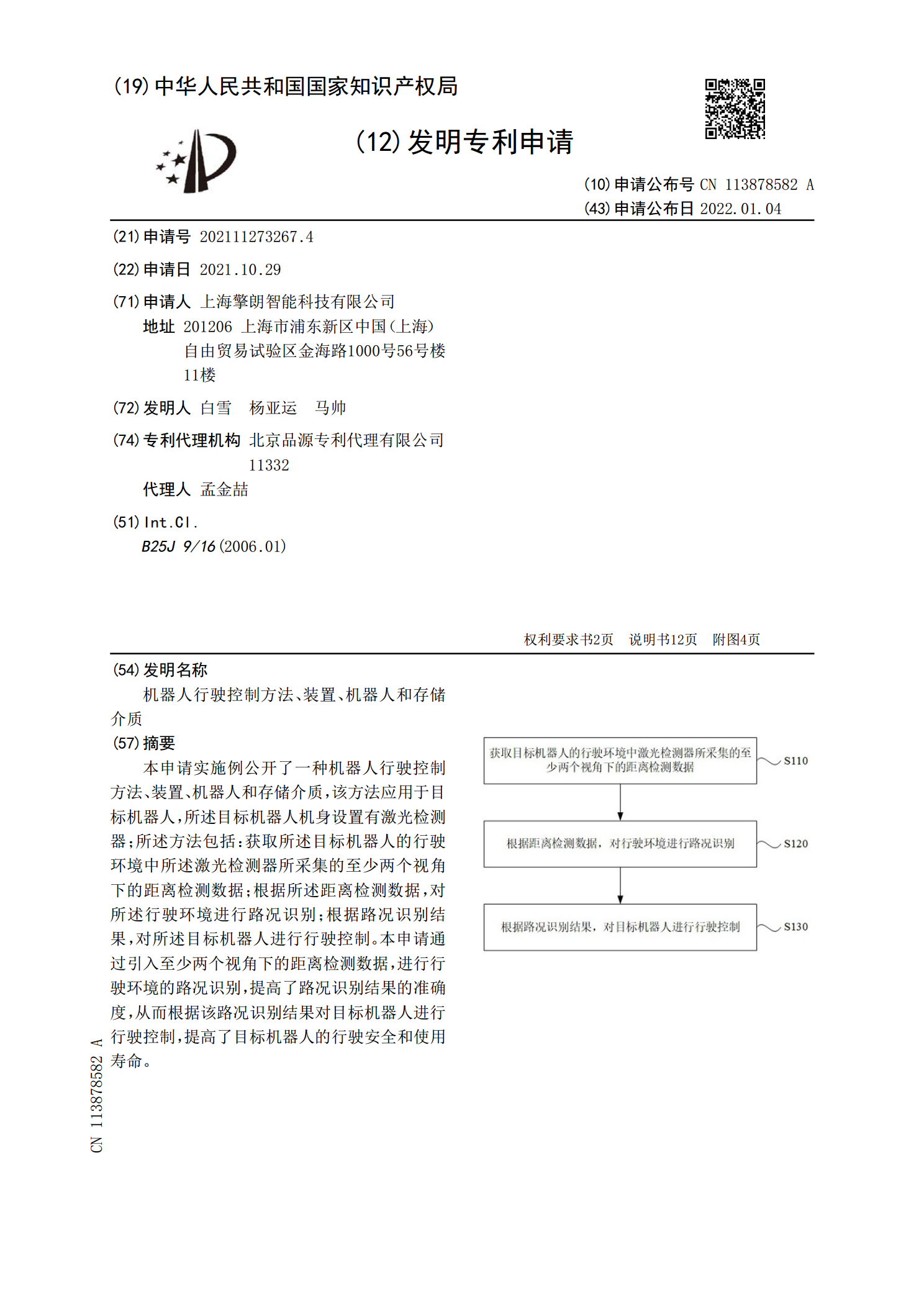
本申请实施例公开了一种机器人行驶控制方法、装置、机器人和存储介质,该方法应用于目标机器人,所述目标机器人机身设置有激光检测器;所述方法包括:获取所述目标机器人的行驶环境中所述激光检测器所采集的至少两个视角下的距离检测数据;根据所述距离检测数据,对所述行驶环境进行路况识别;根据路况识别结果,对所述目标机器人进行行驶控制。本申请通过引入至少两个视角下的距离检测数据,进行行驶环境的路况识别,提高了路况识别结果的准确度,从而根据该路况识别结果对目标机器人进行行驶控制,提高了目标机器人的行驶安全和使用寿命。

机器人控制方法、装置、机器人和存储介质.pdf
本申请实施例公开了一种机器人控制方法、装置、机器人和存储介质,涉及控制领域。该方法包括:在机器人所在区域的电梯门开启后,根据预设路径,控制机器人移动且自转,以采集轿厢内部的至少两个视场角度的目标图像;依次对各所述目标图像进行人物标定和追踪,并根据标定和追踪结果,确定所述轿厢中的目标乘梯人数;根据所述目标乘梯人数,对所述机器人进行乘梯控制。本申请提高了确定结果准确度,同时避免了机器人等待时间过长对机器人,同时减少了无效乘梯过多对电梯的作业效率的影响,从而提高了机器人和电梯的作业效率。

机器人的控制方法、控制装置、机器人和可读存储介质.pdf
本发明提出了一种机器人的控制方法、控制装置、机器人和可读存储介质。其中,机器人的控制方法包括接收手势控制指令;根据手势控制指令控制机器人行驶至第一目标区域;在机器人位于第一目标区域内的情况下,采集第一图像,第一图像为机器人所处环境的环境图像;根据第一图像确定第二目标区域;控制机器人在第二目标区域内运行。本发明实现了用户手势指令带有的位置信息进行精准定位,保证扫地机器人能够对用户期望的清扫区域的污渍、灰尘和/或垃圾等进行清扫,在用户手势控制指令所指的位置不够准确的情况下,能够对清扫位置校准,提高了扫地机器人
控制机器人行走的方法、装置、机器人和存储介质.pdf
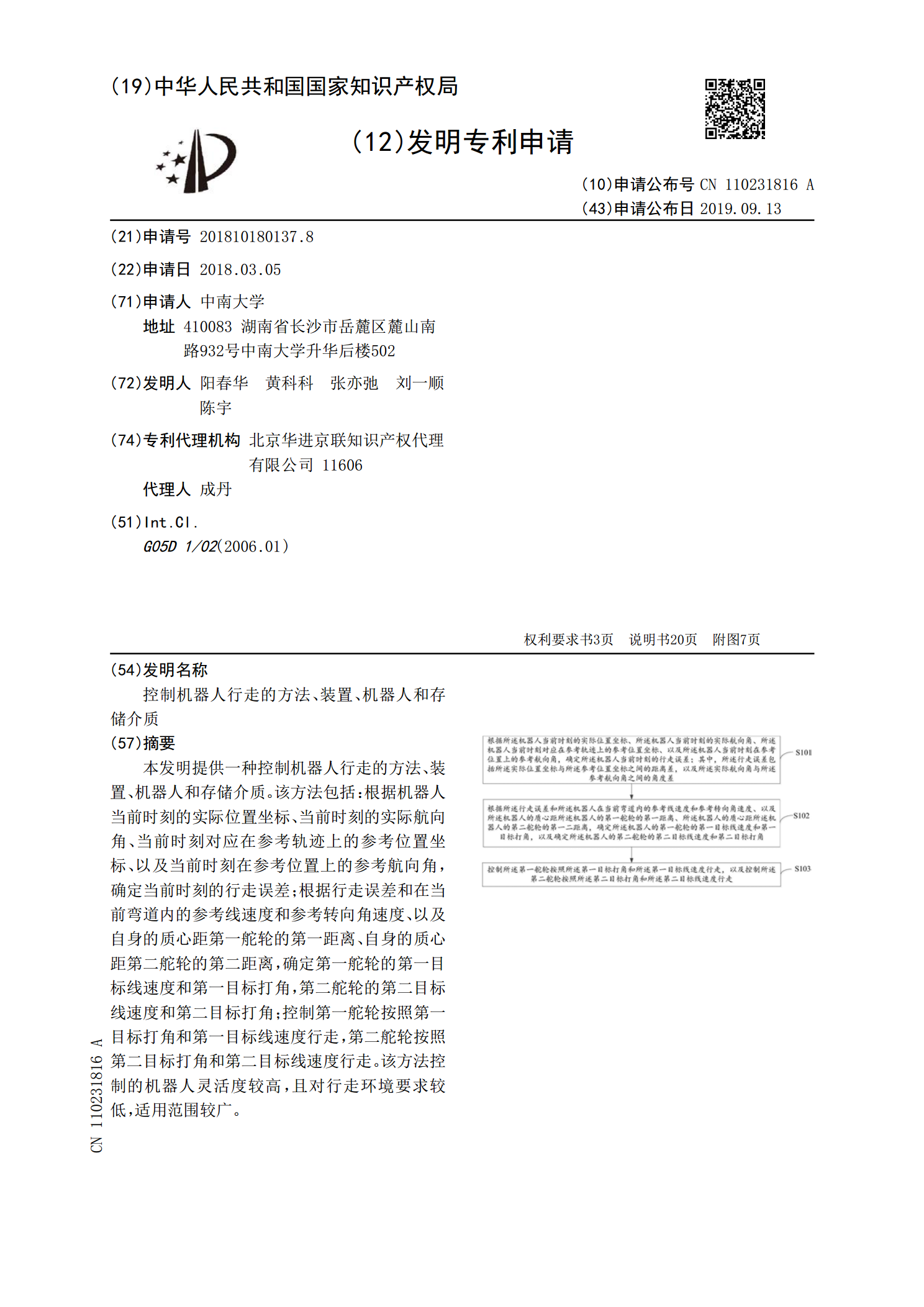
本发明提供一种控制机器人行走的方法、装置、机器人和存储介质。该方法包括:根据机器人当前时刻的实际位置坐标、当前时刻的实际航向角、当前时刻对应在参考轨迹上的参考位置坐标、以及当前时刻在参考位置上的参考航向角,确定当前时刻的行走误差;根据行走误差和在当前弯道内的参考线速度和参考转向角速度、以及自身的质心距第一舵轮的第一距离、自身的质心距第二舵轮的第二距离,确定第一舵轮的第一目标线速度和第一目标打角,第二舵轮的第二目标线速度和第二目标打角;控制第一舵轮按照第一目标打角和第一目标线速度行走,第二舵轮按照第二目标打
机器人的门锁控制方法、装置、机器人和存储介质.pdf
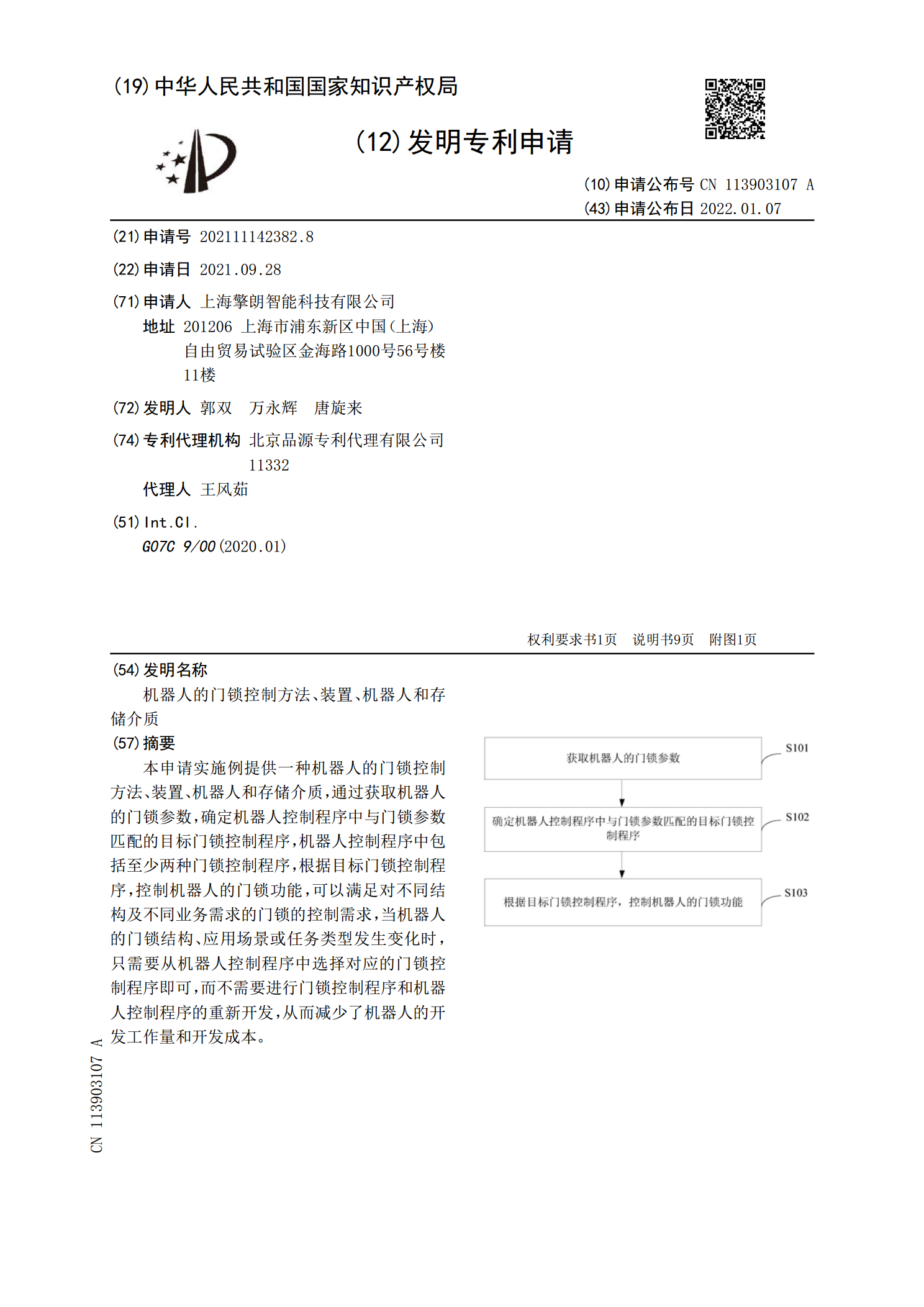
本申请实施例提供一种机器人的门锁控制方法、装置、机器人和存储介质,通过获取机器人的门锁参数,确定机器人控制程序中与门锁参数匹配的目标门锁控制程序,机器人控制程序中包括至少两种门锁控制程序,根据目标门锁控制程序,控制机器人的门锁功能,可以满足对不同结构及不同业务需求的门锁的控制需求,当机器人的门锁结构、应用场景或任务类型发生变化时,只需要从机器人控制程序中选择对应的门锁控制程序即可,而不需要进行门锁控制程序和机器人控制程序的重新开发,从而减少了机器人的开发工作量和开发成本。