
一种距离检测方法、装置及车辆.pdf

Ke****67

1/10

2/10

3/10
4/10
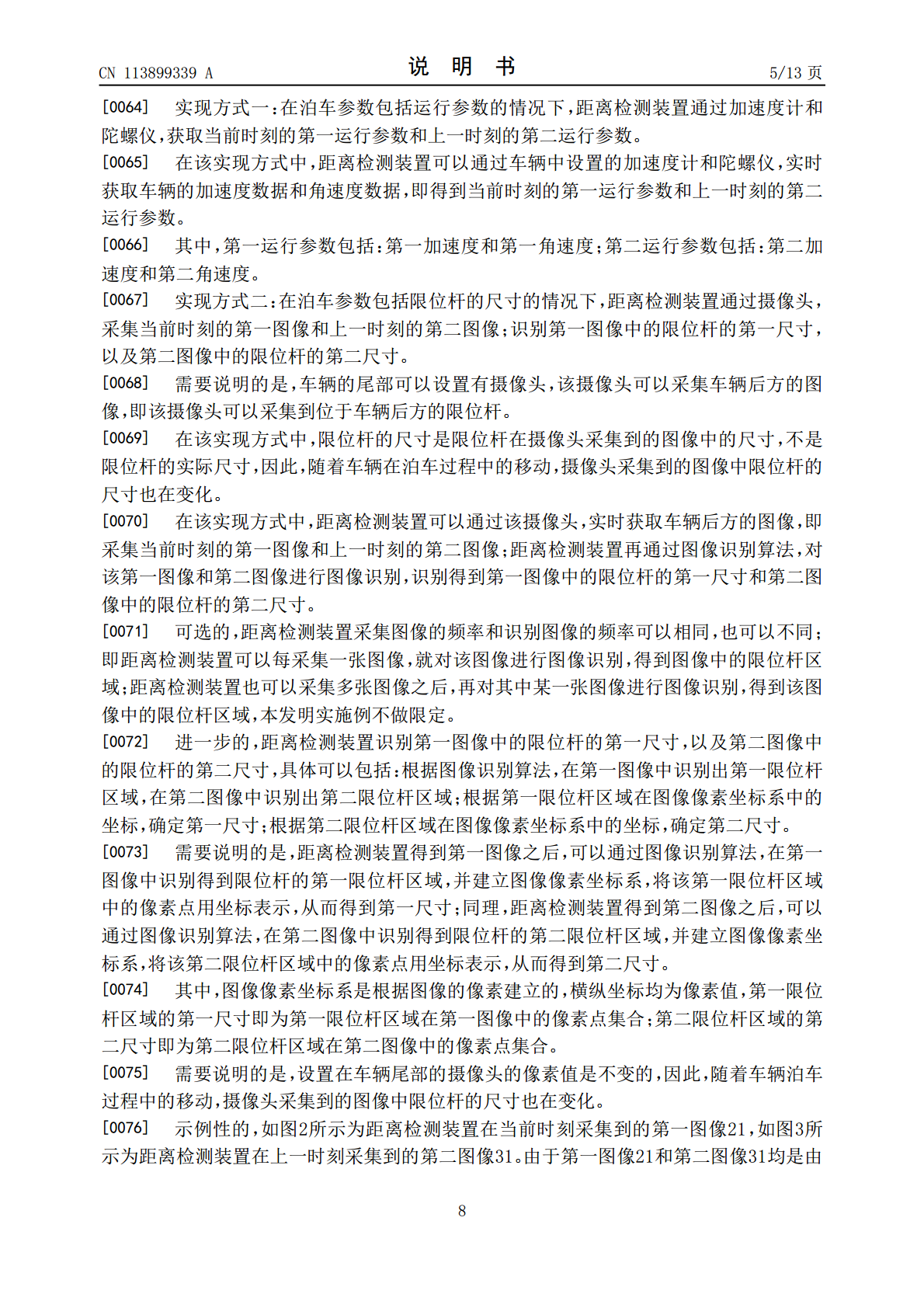
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种距离检测方法、装置及车辆.pdf
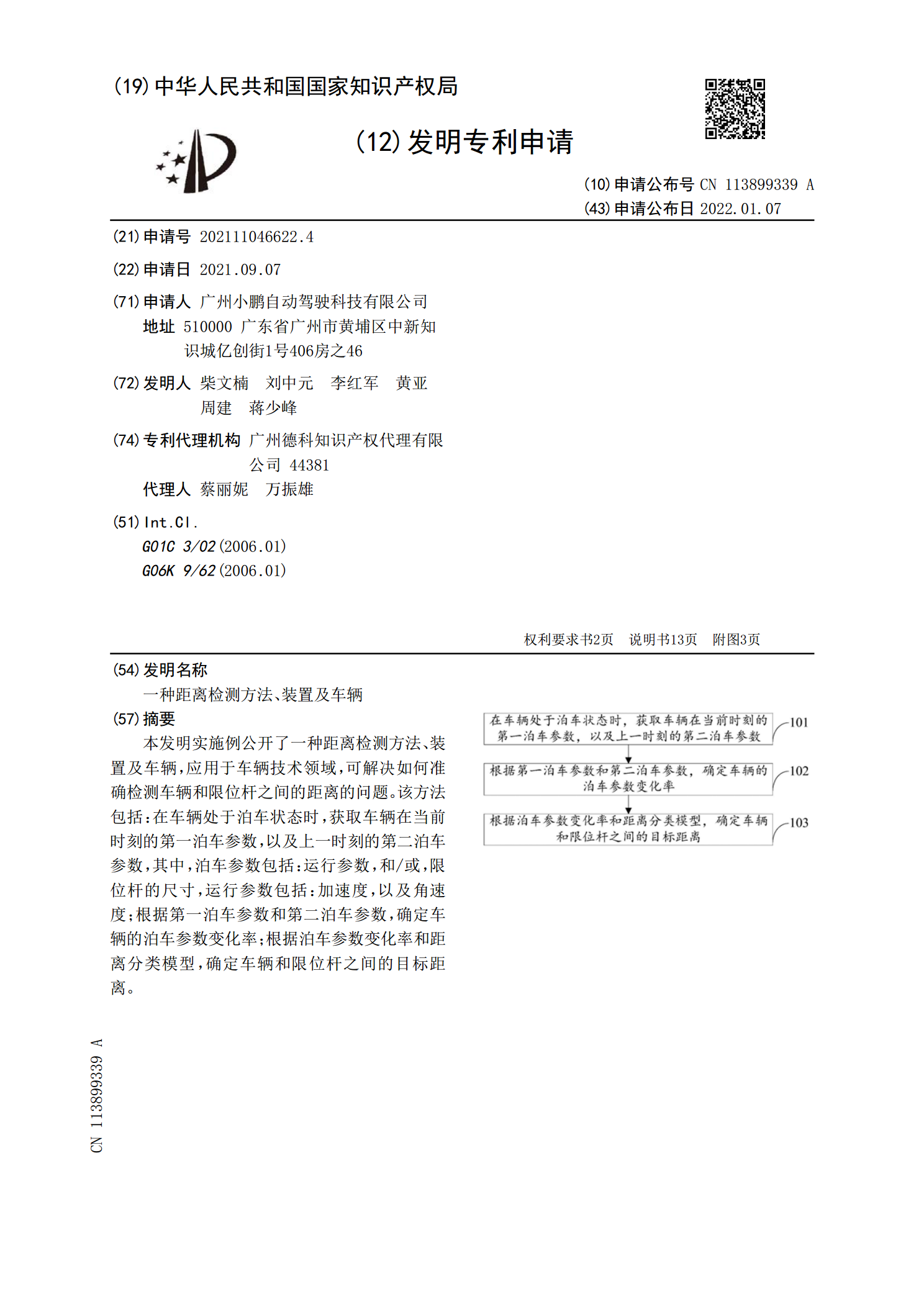
本发明实施例公开了一种距离检测方法、装置及车辆,应用于车辆技术领域,可解决如何准确检测车辆和限位杆之间的距离的问题。该方法包括:在车辆处于泊车状态时,获取车辆在当前时刻的第一泊车参数,以及上一时刻的第二泊车参数,其中,泊车参数包括:运行参数,和/或,限位杆的尺寸,运行参数包括:加速度,以及角速度;根据第一泊车参数和第二泊车参数,确定车辆的泊车参数变化率;根据泊车参数变化率和距离分类模型,确定车辆和限位杆之间的目标距离。
一种距离检测方法、装置及车辆.pdf
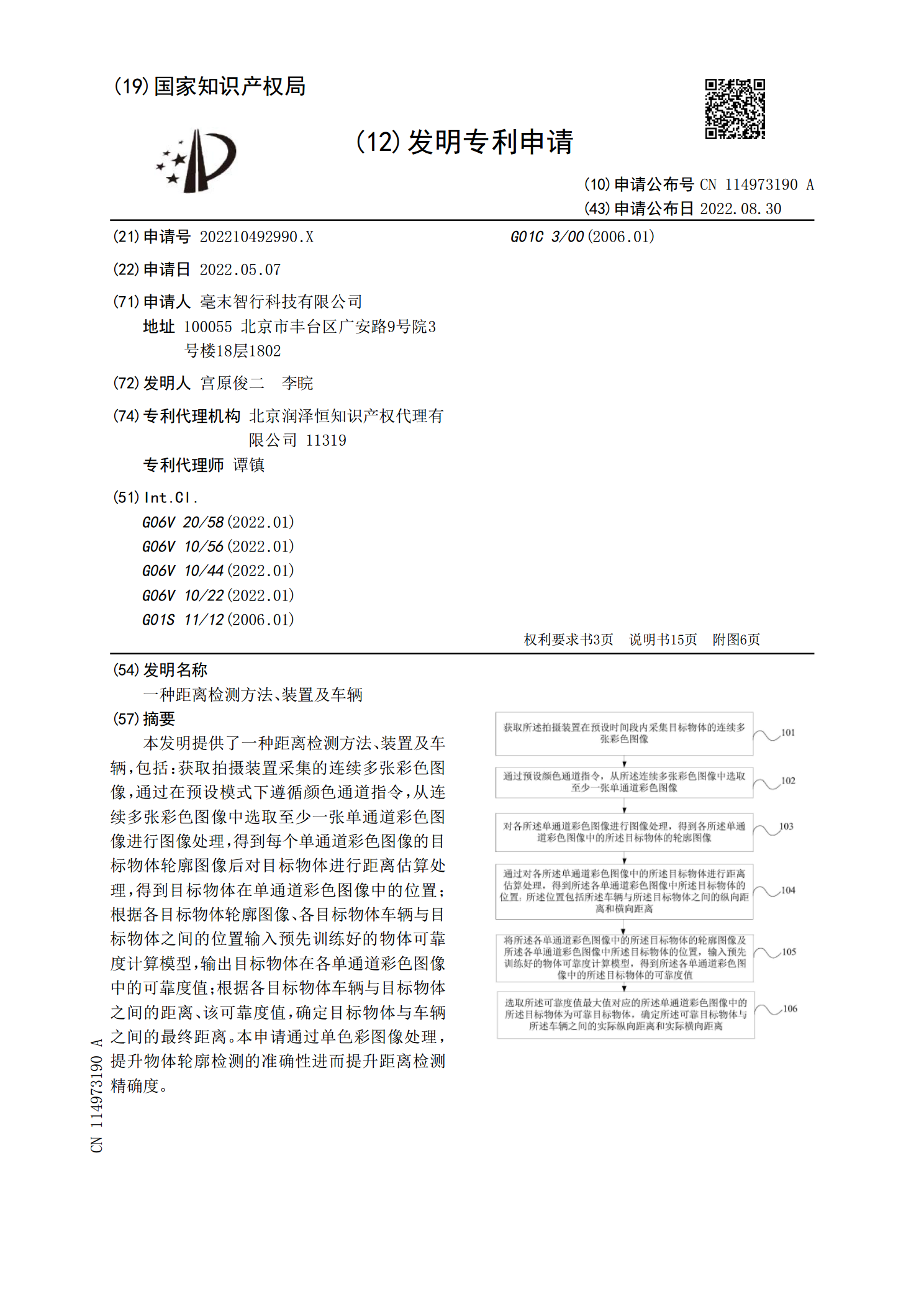
本发明提供了一种距离检测方法、装置及车辆,包括:获取拍摄装置采集的连续多张彩色图像,通过在预设模式下遵循颜色通道指令,从连续多张彩色图像中选取至少一张单通道彩色图像进行图像处理,得到每个单通道彩色图像的目标物体轮廓图像后对目标物体进行距离估算处理,得到目标物体在单通道彩色图像中的位置;根据各目标物体轮廓图像、各目标物体车辆与目标物体之间的位置输入预先训练好的物体可靠度计算模型,输出目标物体在各单通道彩色图像中的可靠度值;根据各目标物体车辆与目标物体之间的距离、该可靠度值,确定目标物体与车辆之间的最终距离。

车辆与障碍物的距离检测方法及装置.pdf
本申请实施例公开了一种车辆与障碍物的距离检测方法及装置,该方法包括:获取全景图像,全景图像中包括至少一个目标对象;对全景图像进行分割处理,得到每个目标对象的对象信息,对象信息包括:类别信息、标识信息以及轮廓信息;根据对象信息,确定车辆的观察点与每个目标对象的目标距离。根据本申请的实施例,能够准确检测目标对象。

一种距离检测方法及装置.pdf
本发明实施例提供一种距离检测方法及装置,方法为,采用安装在车辆轮胎上方挡板上的激光传感器向设定方向发射激光信号;接收返回的激光信号;根据返回的激光信号,确定该车辆轮胎侧面与路面上物体之间的水平距离。采用本发明实施例提供的方案,通过采集车辆轮胎侧面的激光信号,并确定轮胎侧面与路面上物体的水平距离,使得驾驶员能够及时得到车辆轮胎侧面与路面上物体的靠近程度,提高了车辆行驶的安全性。

距离检测装置及其距离检测方法.pdf
本发明提供一种距离检测装置及其距离检测方法。依据前次计算出的扬声器与声音接收器间的相对速度利用都普勒效应修正预设声音信号的频率值,将修正后的预设声音信号与声音接收器所接收到的声音信号进行交叉相关运算,以产生交叉相关信号,并依据交叉相关信号的封包振幅峰值所对应的时间与扬声器输出预设声音信号的封包振幅峰值的时间来计算扬声器与声音接收器间的距离。