
三维轨迹平滑处理方法、装置、设备及存储介质.pdf

努力****爱静


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

三维轨迹平滑处理方法、装置、设备及存储介质.pdf
本发明实施例公开了一种三维轨迹平滑处理方法,包括:跟踪目标三维数据轨迹r
目标轨迹的平滑方法和装置、电子设备和存储介质.pdf
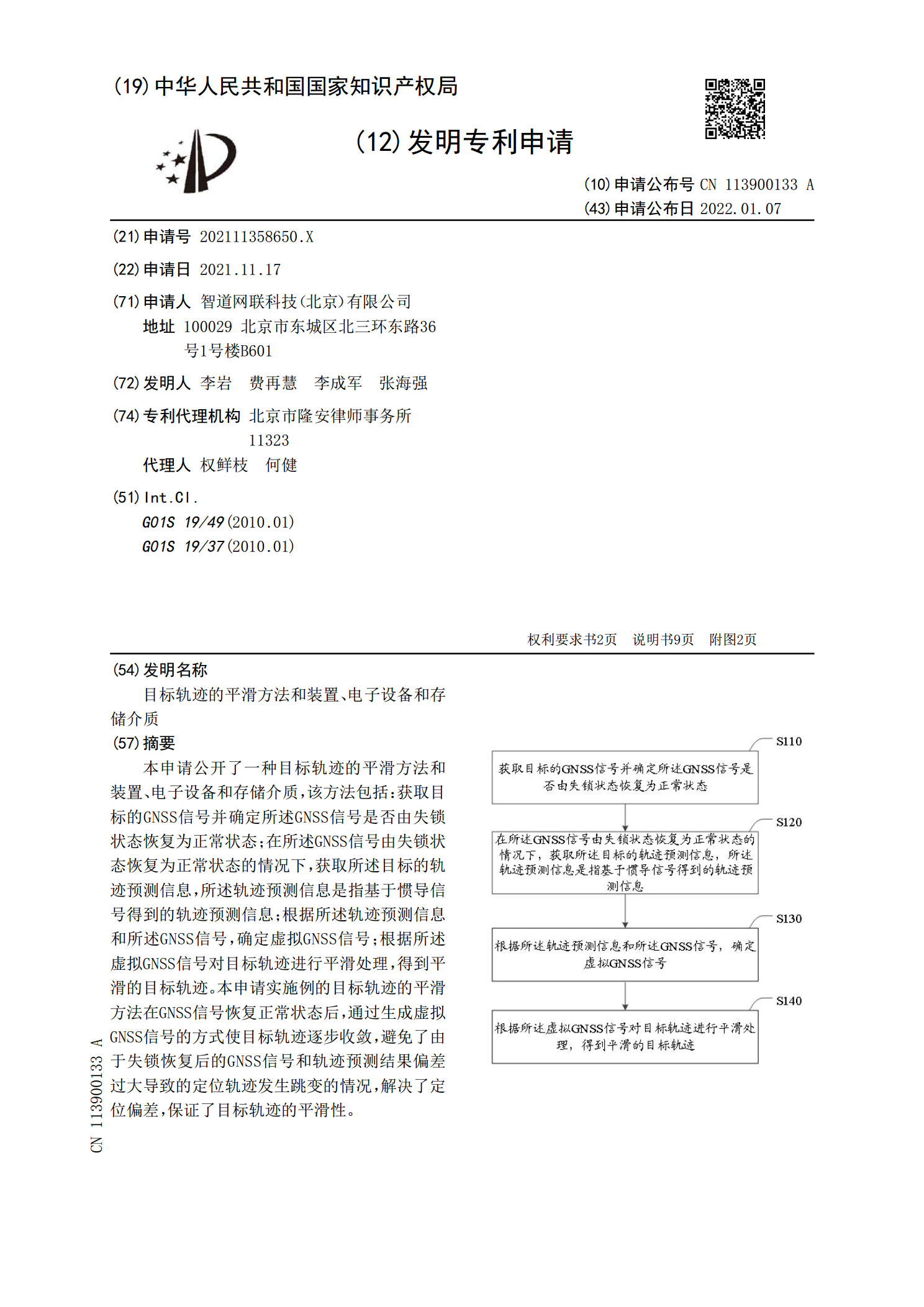
本申请公开了一种目标轨迹的平滑方法和装置、电子设备和存储介质,该方法包括:获取目标的GNSS信号并确定所述GNSS信号是否由失锁状态恢复为正常状态;在所述GNSS信号由失锁状态恢复为正常状态的情况下,获取所述目标的轨迹预测信息,所述轨迹预测信息是指基于惯导信号得到的轨迹预测信息;根据所述轨迹预测信息和所述GNSS信号,确定虚拟GNSS信号;根据所述虚拟GNSS信号对目标轨迹进行平滑处理,得到平滑的目标轨迹。本申请实施例的目标轨迹的平滑方法在GNSS信号恢复正常状态后,通过生成虚拟GNSS信号的方式使目标轨
轨迹平滑方法、电子设备及可读存储介质.pdf
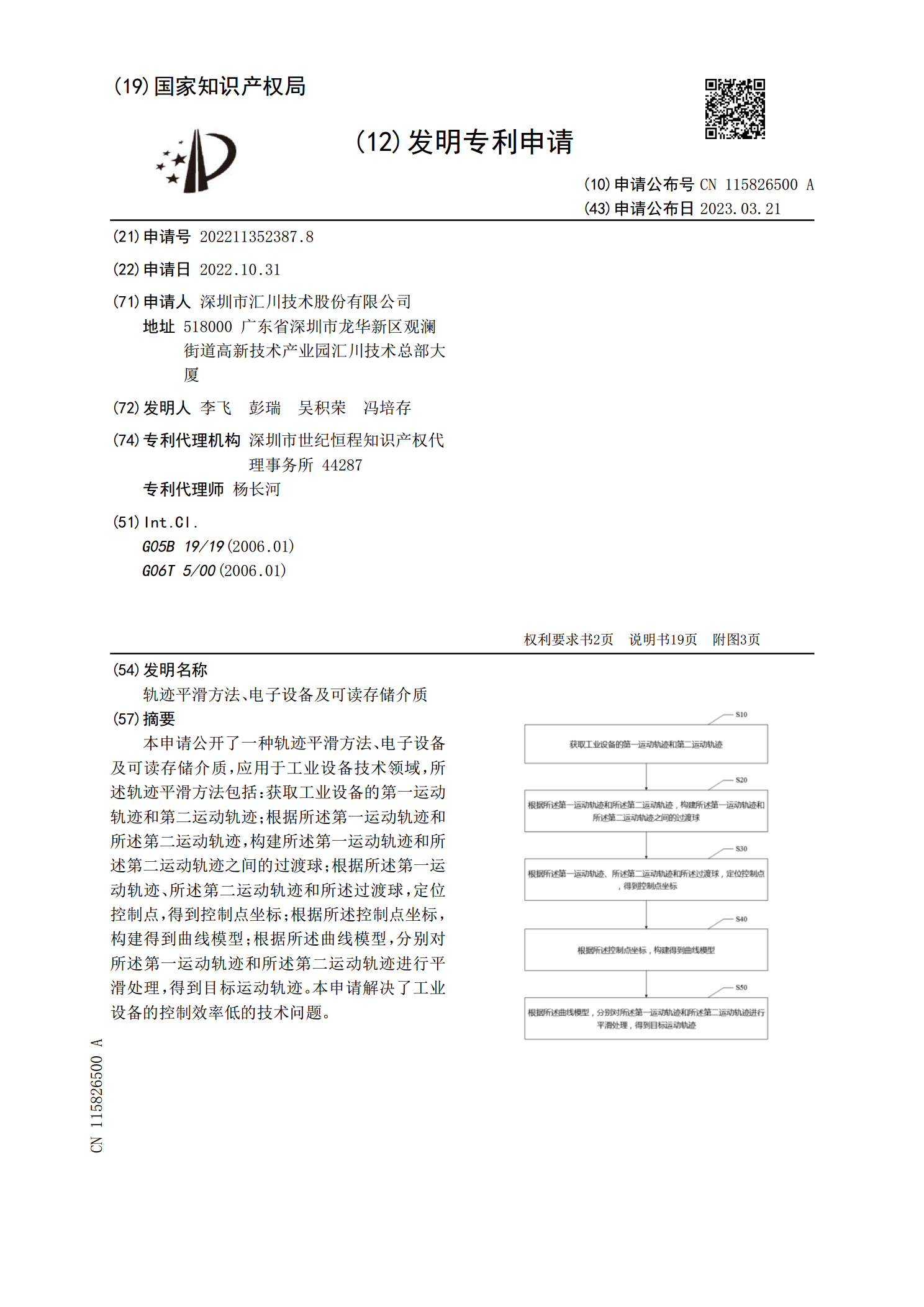
本申请公开了一种轨迹平滑方法、电子设备及可读存储介质,应用于工业设备技术领域,所述轨迹平滑方法包括:获取工业设备的第一运动轨迹和第二运动轨迹;根据所述第一运动轨迹和所述第二运动轨迹,构建所述第一运动轨迹和所述第二运动轨迹之间的过渡球;根据所述第一运动轨迹、所述第二运动轨迹和所述过渡球,定位控制点,得到控制点坐标;根据所述控制点坐标,构建得到曲线模型;根据所述曲线模型,分别对所述第一运动轨迹和所述第二运动轨迹进行平滑处理,得到目标运动轨迹。本申请解决了工业设备的控制效率低的技术问题。
移动轨迹数据处理方法、装置、设备及存储介质.pdf
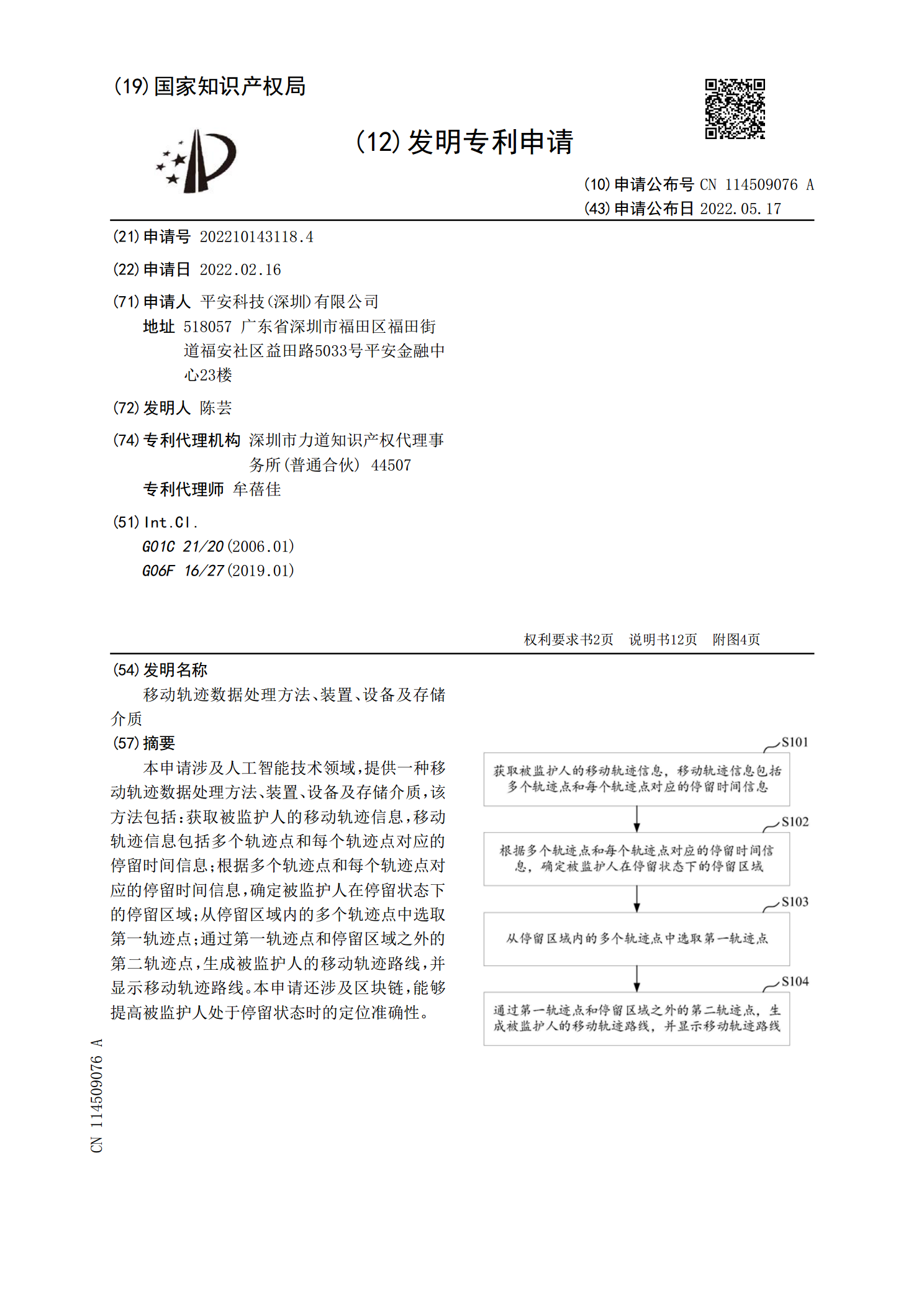
本申请涉及人工智能技术领域,提供一种移动轨迹数据处理方法、装置、设备及存储介质,该方法包括:获取被监护人的移动轨迹信息,移动轨迹信息包括多个轨迹点和每个轨迹点对应的停留时间信息;根据多个轨迹点和每个轨迹点对应的停留时间信息,确定被监护人在停留状态下的停留区域;从停留区域内的多个轨迹点中选取第一轨迹点;通过第一轨迹点和停留区域之外的第二轨迹点,生成被监护人的移动轨迹路线,并显示移动轨迹路线。本申请还涉及区块链,能够提高被监护人处于停留状态时的定位准确性。

目标轨迹的处理方法、装置、存储介质及电子装置.pdf
本发明提供了一种目标轨迹的处理方法、装置、存储介质及电子装置,其中,该方法包括:在目标地图中输入目标轨迹;确定所述目标轨迹在所述目标地图中的位置;基于所述目标轨迹在所述目标地图中的位置判断所述目标轨迹是否为有效轨迹;在确定所述目标轨迹为有效轨迹时保留所述目标轨迹,和/或,在确定所述目标轨迹为无效轨迹时删除所述目标轨迹。通过本发明,解决了相关技术中存在的无法确定形成的轨迹是是否要终结的问题,进而达到了准确有效地确定待终结的轨迹的目的。