
轨迹平滑方法、电子设备及可读存储介质.pdf

一条****ee


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轨迹平滑方法、电子设备及可读存储介质.pdf
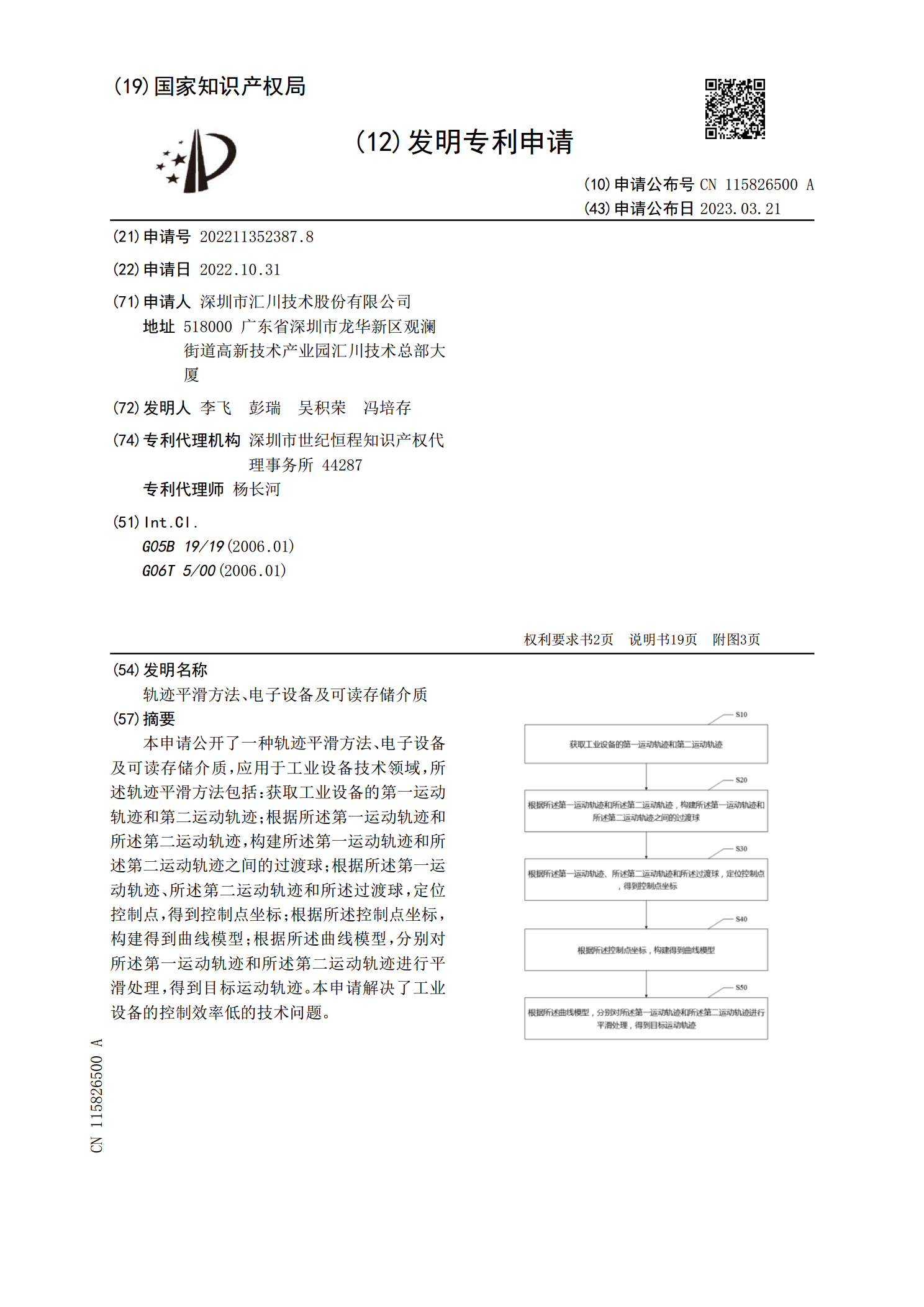
本申请公开了一种轨迹平滑方法、电子设备及可读存储介质,应用于工业设备技术领域,所述轨迹平滑方法包括:获取工业设备的第一运动轨迹和第二运动轨迹;根据所述第一运动轨迹和所述第二运动轨迹,构建所述第一运动轨迹和所述第二运动轨迹之间的过渡球;根据所述第一运动轨迹、所述第二运动轨迹和所述过渡球,定位控制点,得到控制点坐标;根据所述控制点坐标,构建得到曲线模型;根据所述曲线模型,分别对所述第一运动轨迹和所述第二运动轨迹进行平滑处理,得到目标运动轨迹。本申请解决了工业设备的控制效率低的技术问题。
目标轨迹的平滑方法和装置、电子设备和存储介质.pdf
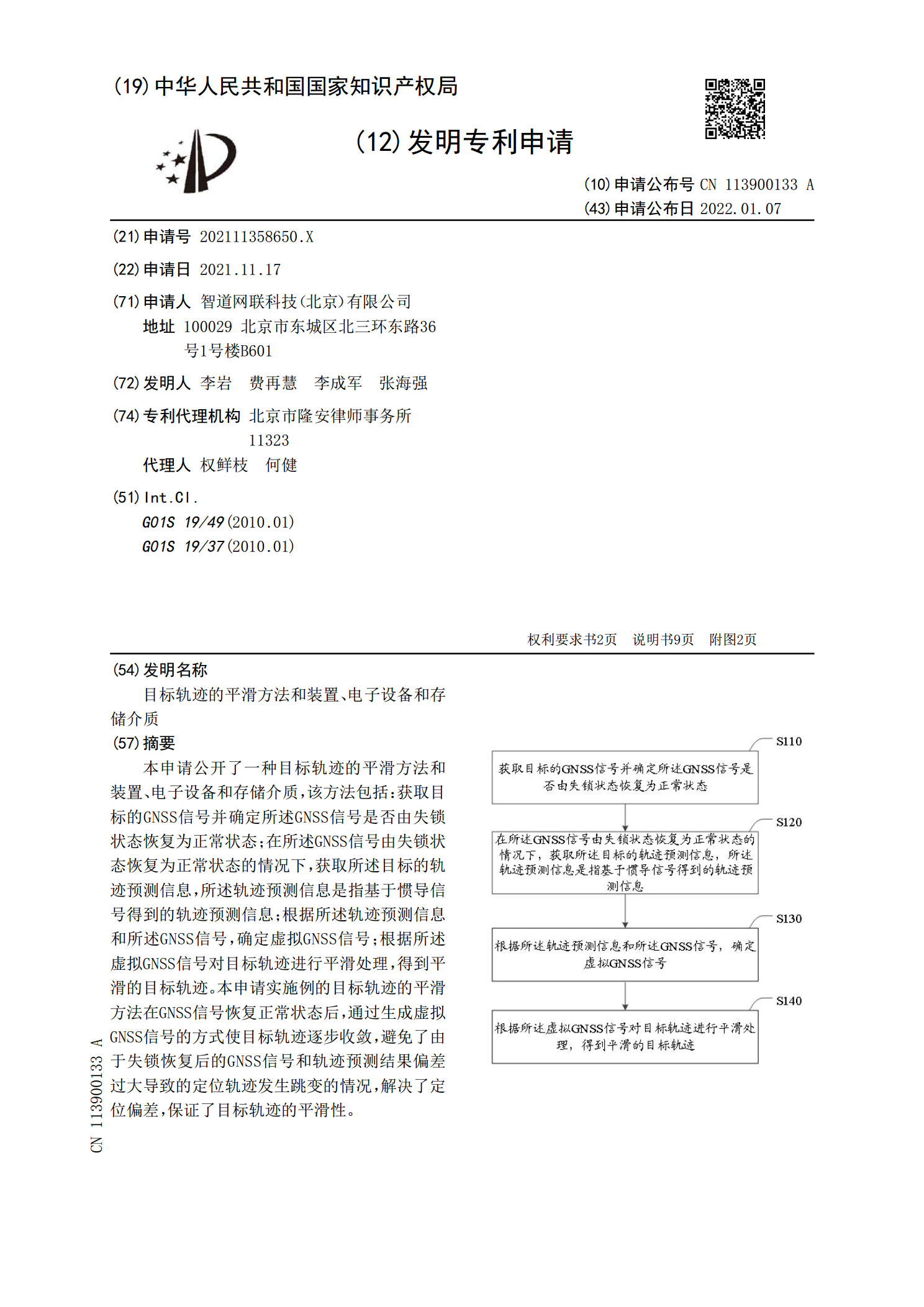
本申请公开了一种目标轨迹的平滑方法和装置、电子设备和存储介质,该方法包括:获取目标的GNSS信号并确定所述GNSS信号是否由失锁状态恢复为正常状态;在所述GNSS信号由失锁状态恢复为正常状态的情况下,获取所述目标的轨迹预测信息,所述轨迹预测信息是指基于惯导信号得到的轨迹预测信息;根据所述轨迹预测信息和所述GNSS信号,确定虚拟GNSS信号;根据所述虚拟GNSS信号对目标轨迹进行平滑处理,得到平滑的目标轨迹。本申请实施例的目标轨迹的平滑方法在GNSS信号恢复正常状态后,通过生成虚拟GNSS信号的方式使目标轨
运动轨迹预测方法及系统、电子设备及可读存储介质.pdf
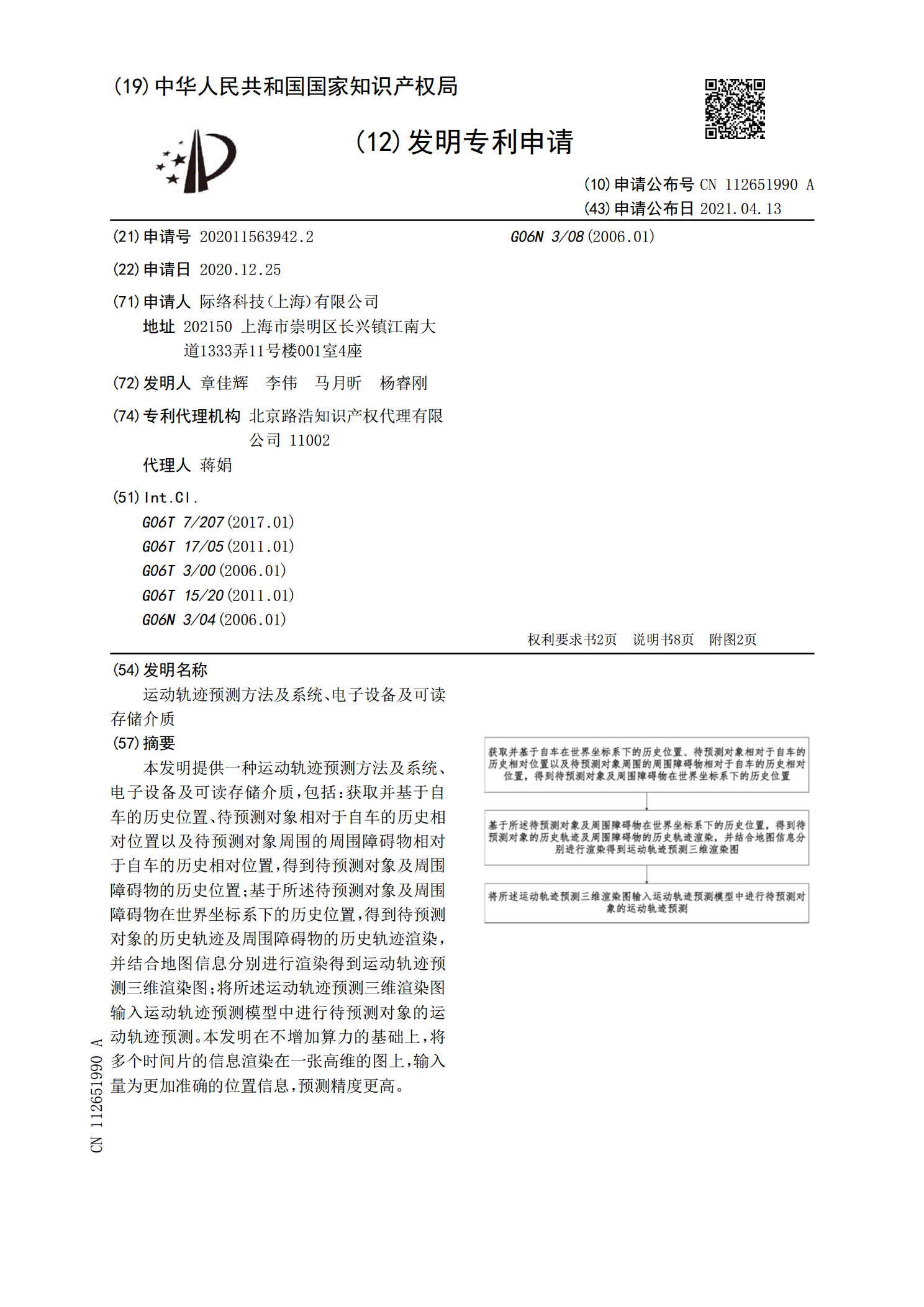
本发明提供一种运动轨迹预测方法及系统、电子设备及可读存储介质,包括:获取并基于自车的历史位置、待预测对象相对于自车的历史相对位置以及待预测对象周围的周围障碍物相对于自车的历史相对位置,得到待预测对象及周围障碍物的历史位置;基于所述待预测对象及周围障碍物在世界坐标系下的历史位置,得到待预测对象的历史轨迹及周围障碍物的历史轨迹渲染,并结合地图信息分别进行渲染得到运动轨迹预测三维渲染图;将所述运动轨迹预测三维渲染图输入运动轨迹预测模型中进行待预测对象的运动轨迹预测。本发明在不增加算力的基础上,将多个时间片的信息

轨迹数据的处理方法、装置、可读存储介质和电子设备.pdf
本发明提供了一种轨迹数据的处理方法、装置、可读存储介质和电子设备,属于轨迹数据技术领域。方法包括:响应于轨迹数据的处理请求,根据时间信息,按照时间的先后顺序对多个第一轨迹点进行排序,生成轨迹线;在轨迹线中确定目标区域对应的目标轨迹线,以及目标轨迹线内包含的多个第二轨迹点;根据特征信息和目标对象,确定多个第二轨迹点的优先级;获取多个第二轨迹点的数量,并判断数量是否大于数量阈值;基于数量大于数量阈值,根据数量、数量阈值和优先级,确定待删除轨迹点,得到目标轨迹点;展示目标轨迹线和目标轨迹点。本发明提供的技术方案

轨迹异常检测方法和装置、电子设备及可读存储介质.pdf
本发明提供一种轨迹异常检测方法和装置、电子设备及可读存储介质,其中所述方法包括:获取目标对象的历史行驶轨迹信息及实时行驶轨迹信息;对历史行驶轨迹信息进行密度聚类,基于所述密度聚类的结果获得目标对象的日间常驻地和夜间常驻地;基于目标对象分别在日间常驻地的第一历史停留时长和夜间常驻地的第二历史停留时长,得到昼伏夜出判断比例;基于实时行驶轨迹信息,获取并基于目标对象分别在日间常驻地的第一实时停留时长和夜间常驻地的第二实时停留时长,得到昼伏夜出实时比例;基于昼伏夜出判断比例、昼伏夜出实时比例的比较结果,检测出目标