
一种呼叫失败处理方法、装置、电子设备及存储介质.pdf

东耀****哥哥

1/10
2/10

3/10
4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种呼叫失败处理方法、装置、电子设备及存储介质.pdf
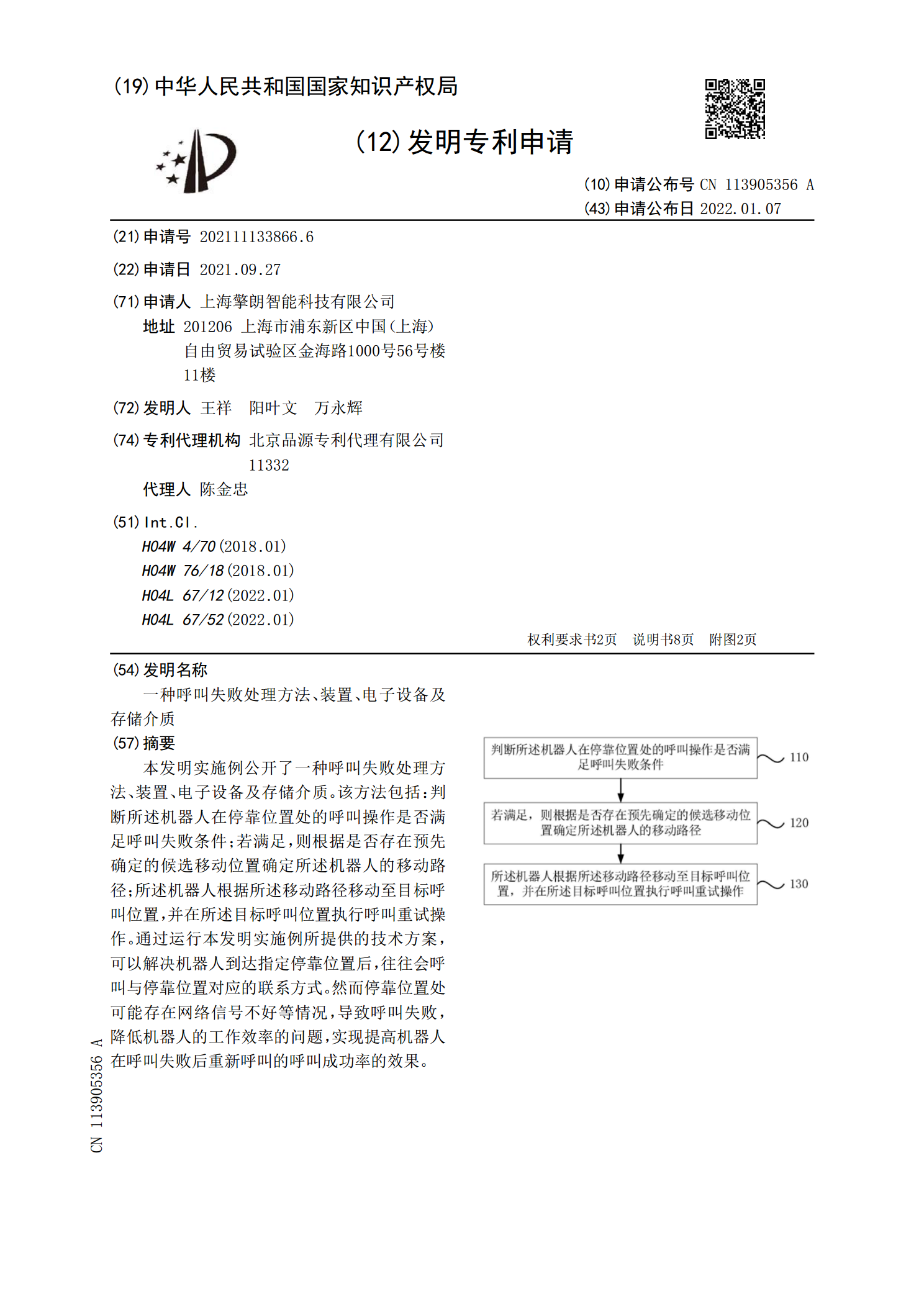
本发明实施例公开了一种呼叫失败处理方法、装置、电子设备及存储介质。该方法包括:判断所述机器人在停靠位置处的呼叫操作是否满足呼叫失败条件;若满足,则根据是否存在预先确定的候选移动位置确定所述机器人的移动路径;所述机器人根据所述移动路径移动至目标呼叫位置,并在所述目标呼叫位置执行呼叫重试操作。通过运行本发明实施例所提供的技术方案,可以解决机器人到达指定停靠位置后,往往会呼叫与停靠位置对应的联系方式。然而停靠位置处可能存在网络信号不好等情况,导致呼叫失败,降低机器人的工作效率的问题,实现提高机器人在呼叫失败后重
呼叫处理方法、呼叫中心、电子设备和存储介质.pdf
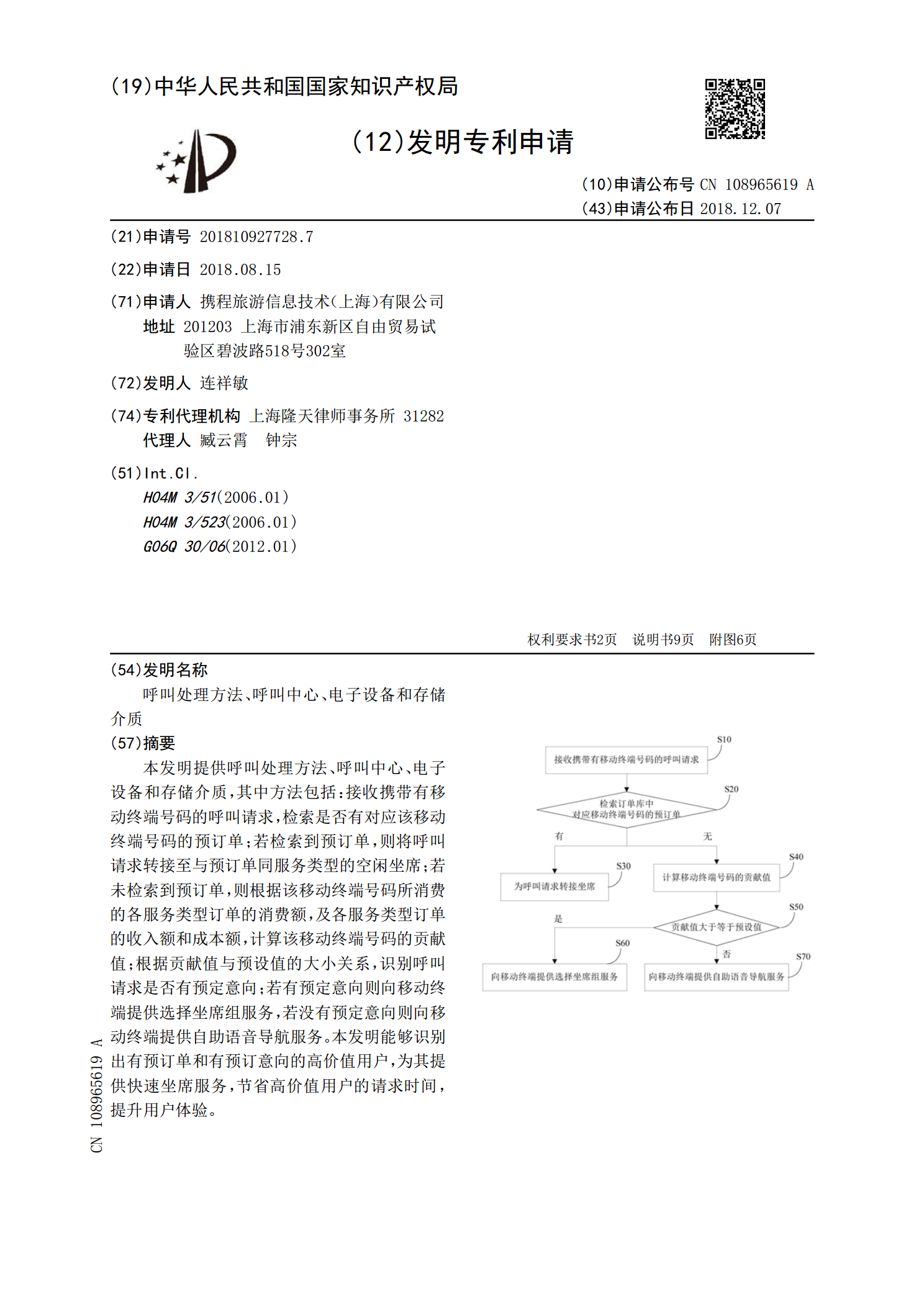
本发明提供呼叫处理方法、呼叫中心、电子设备和存储介质,其中方法包括:接收携带有移动终端号码的呼叫请求,检索是否有对应该移动终端号码的预订单;若检索到预订单,则将呼叫请求转接至与预订单同服务类型的空闲坐席;若未检索到预订单,则根据该移动终端号码所消费的各服务类型订单的消费额,及各服务类型订单的收入额和成本额,计算该移动终端号码的贡献值;根据贡献值与预设值的大小关系,识别呼叫请求是否有预定意向;若有预定意向则向移动终端提供选择坐席组服务,若没有预定意向则向移动终端提供自助语音导航服务。本发明能够识别出有预订单

语音呼叫方法、装置、存储介质及电子设备.pdf
本公开涉及一种语音呼叫方法、装置、存储介质及电子设备,所述方法包括:通过响应于接收到的语音呼叫请求,获取终端当前驻留的第一网络的第一信号质量;在该第一信号质量小于或等于第一预设信号门限的情况下,通过第二网络发起语音呼叫。从而避免了由于第一网络信号质量差导致语音呼叫时延过大或呼叫失败的问题,可以降低语音呼叫时延,提升语音呼叫成功率,从而提升用户的语音业务感知。
呼叫处理方法、装置、介质及电子设备.pdf
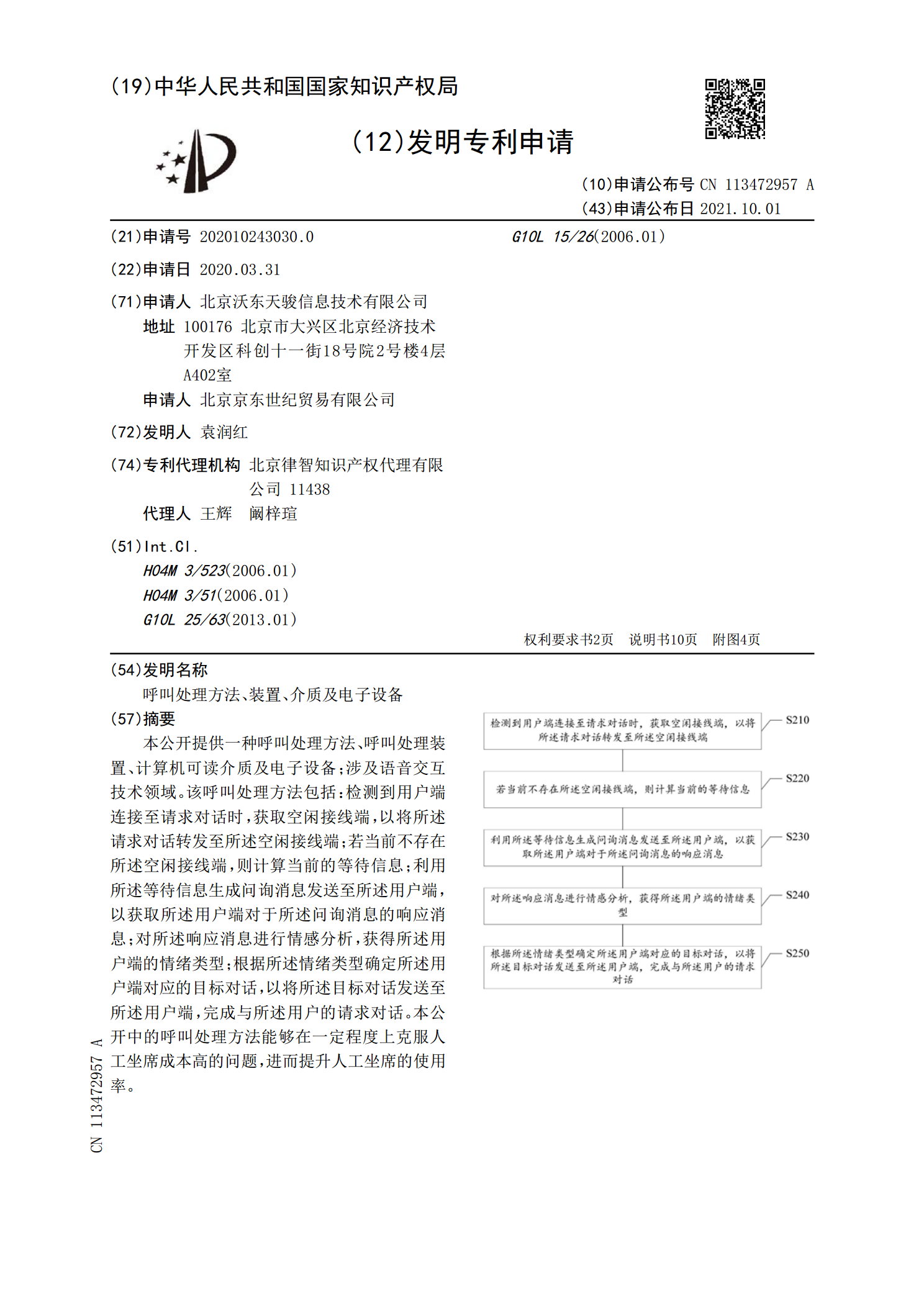
本公开提供一种呼叫处理方法、呼叫处理装置、计算机可读介质及电子设备;涉及语音交互技术领域。该呼叫处理方法包括:检测到用户端连接至请求对话时,获取空闲接线端,以将所述请求对话转发至所述空闲接线端;若当前不存在所述空闲接线端,则计算当前的等待信息;利用所述等待信息生成问询消息发送至所述用户端,以获取所述用户端对于所述问询消息的响应消息;对所述响应消息进行情感分析,获得所述用户端的情绪类型;根据所述情绪类型确定所述用户端对应的目标对话,以将所述目标对话发送至所述用户端,完成与所述用户的请求对话。本公开中的呼叫处
医护呼叫方法、装置、电子设备和存储介质.pdf
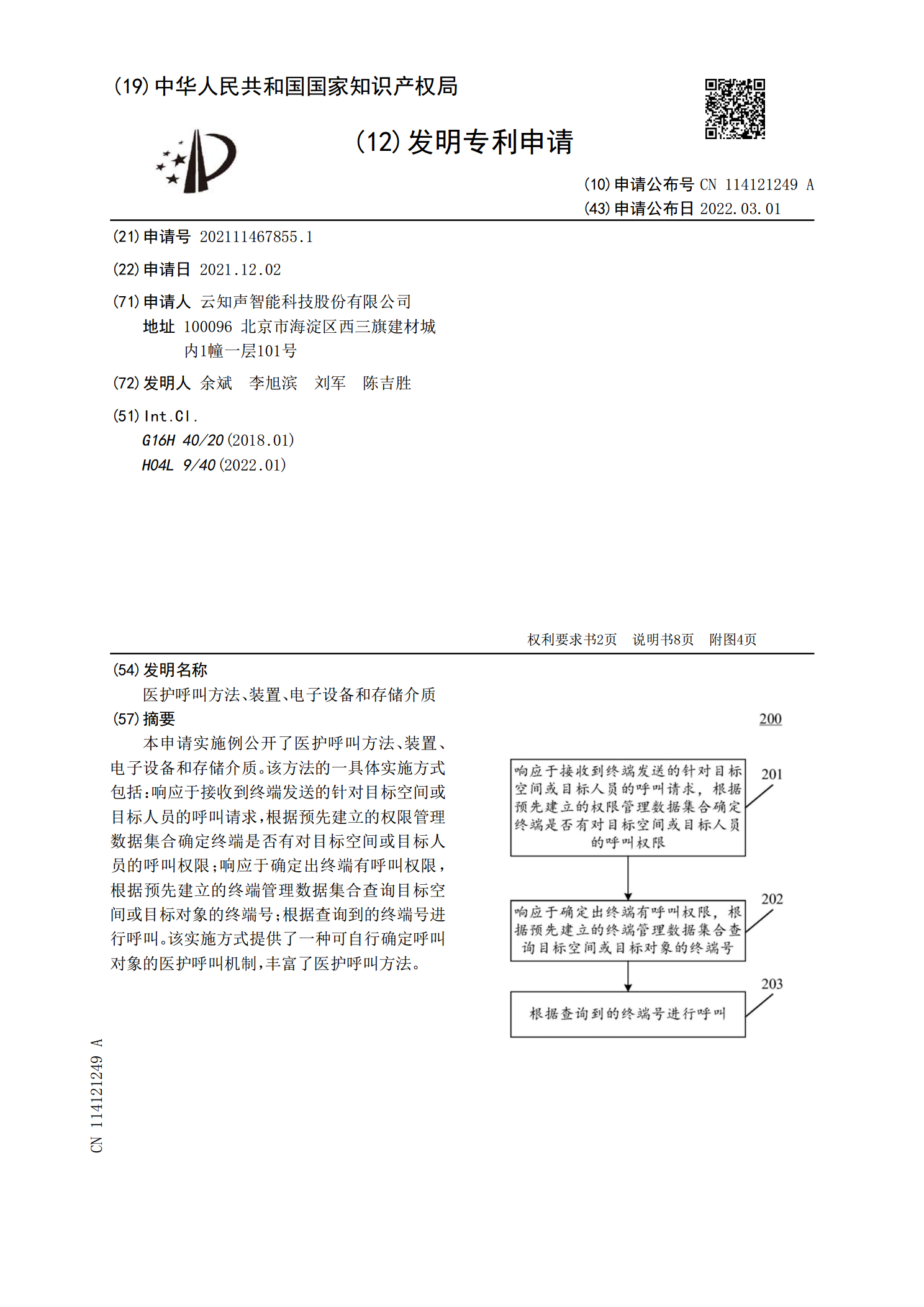
本申请实施例公开了医护呼叫方法、装置、电子设备和存储介质。该方法的一具体实施方式包括:响应于接收到终端发送的针对目标空间或目标人员的呼叫请求,根据预先建立的权限管理数据集合确定终端是否有对目标空间或目标人员的呼叫权限;响应于确定出终端有呼叫权限,根据预先建立的终端管理数据集合查询目标空间或目标对象的终端号;根据查询到的终端号进行呼叫。该实施方式提供了一种可自行确定呼叫对象的医护呼叫机制,丰富了医护呼叫方法。