
定位方法及装置、设备、存储介质.pdf

是你****松呀


1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
定位方法、装置、设备及存储介质.pdf
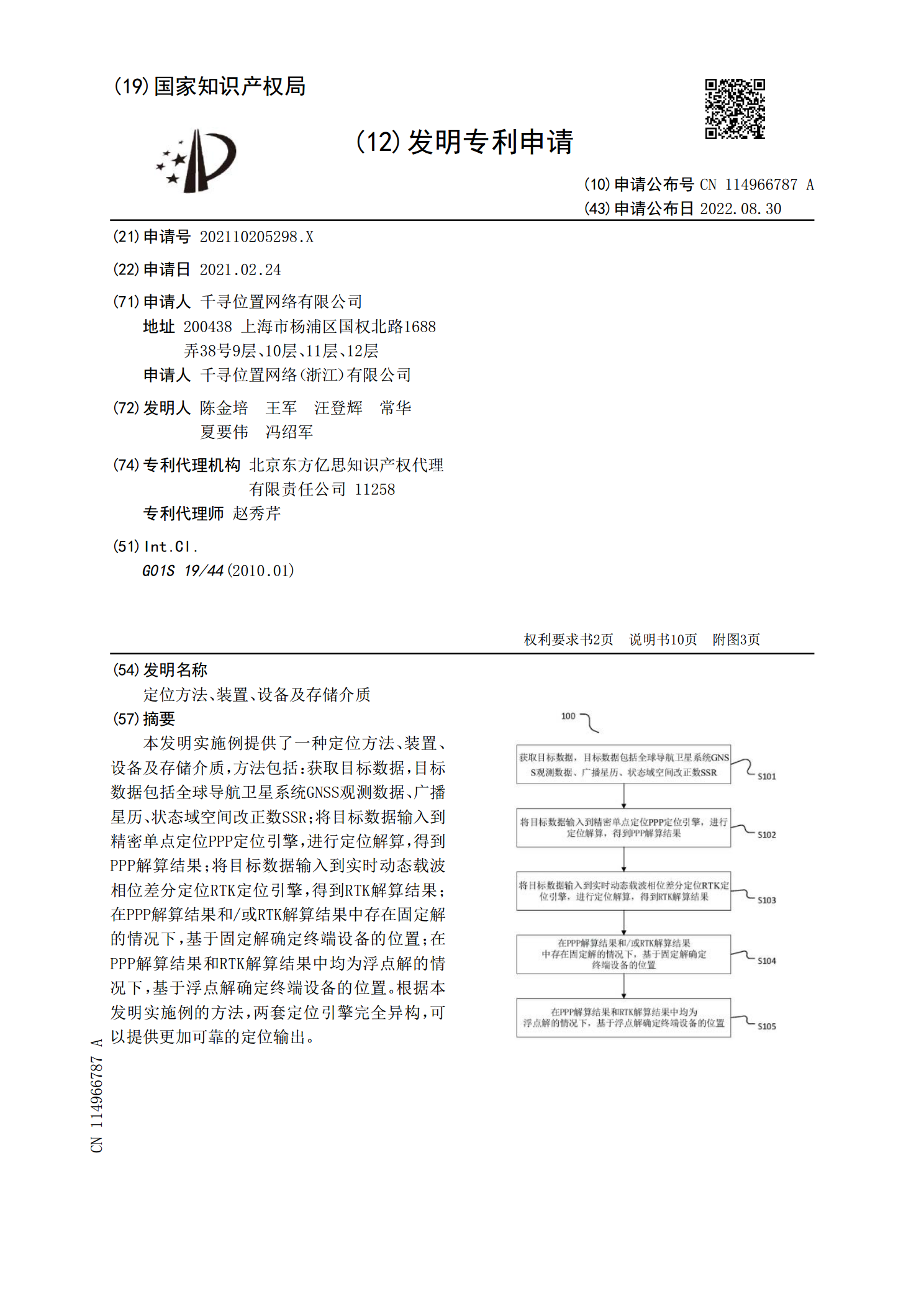
本发明实施例提供了一种定位方法、装置、设备及存储介质,方法包括:获取目标数据,目标数据包括全球导航卫星系统GNSS观测数据、广播星历、状态域空间改正数SSR;将目标数据输入到精密单点定位PPP定位引擎,进行定位解算,得到PPP解算结果;将目标数据输入到实时动态载波相位差分定位RTK定位引擎,得到RTK解算结果;在PPP解算结果和/或RTK解算结果中存在固定解的情况下,基于固定解确定终端设备的位置;在PPP解算结果和RTK解算结果中均为浮点解的情况下,基于浮点解确定终端设备的位置。根据本发明实施例的方法,两
定位方法、装置、设备及存储介质.pdf
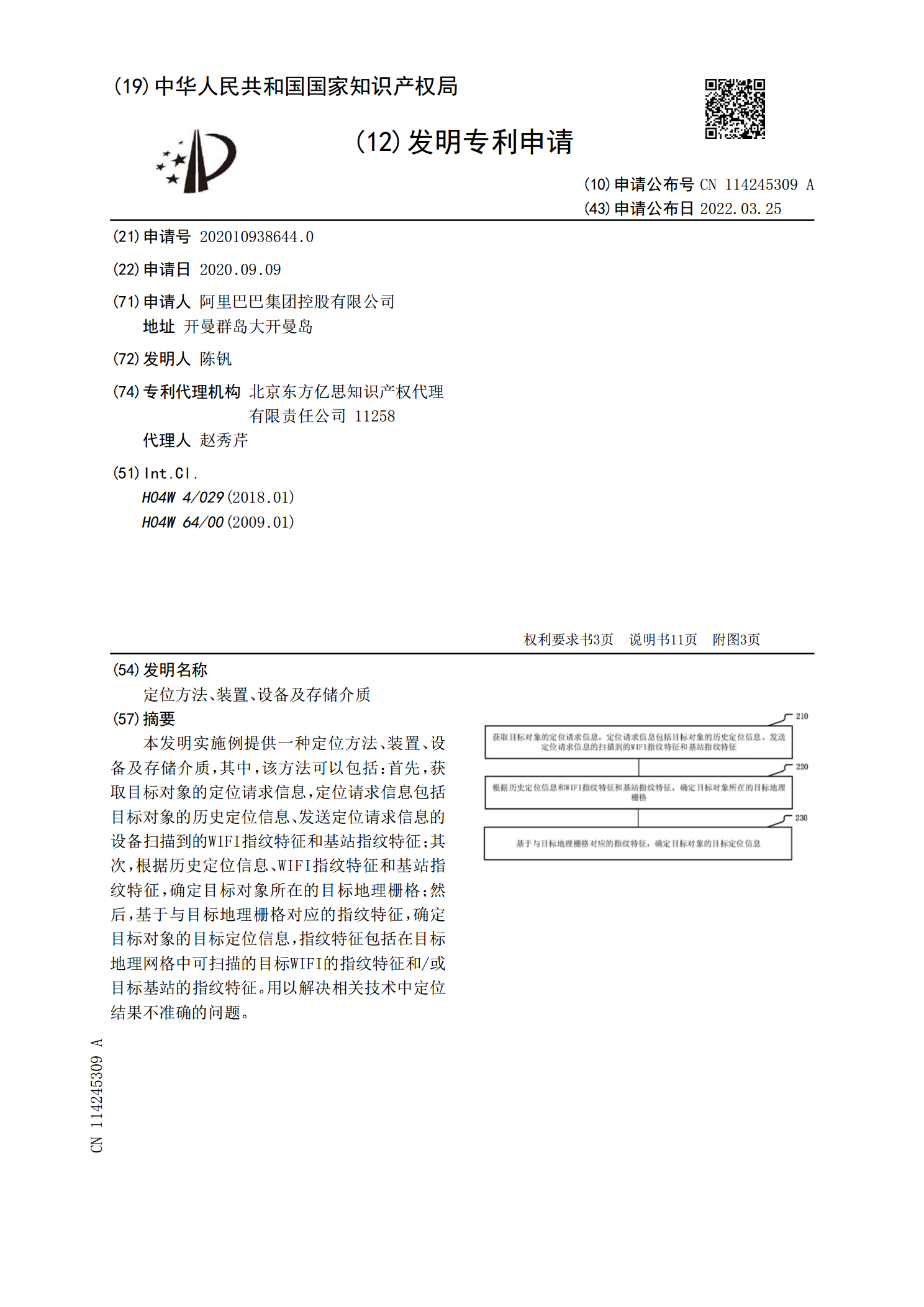
本发明实施例提供一种定位方法、装置、设备及存储介质,其中,该方法可以包括:首先,获取目标对象的定位请求信息,定位请求信息包括目标对象的历史定位信息、发送定位请求信息的设备扫描到的WIFI指纹特征和基站指纹特征;其次,根据历史定位信息、WIFI指纹特征和基站指纹特征,确定目标对象所在的目标地理栅格;然后,基于与目标地理栅格对应的指纹特征,确定目标对象的目标定位信息,指纹特征包括在目标地理网格中可扫描的目标WIFI的指纹特征和/或目标基站的指纹特征。用以解决相关技术中定位结果不准确的问题。

定位方法及装置、设备、存储介质.pdf
本申请公开了一种定位方法及装置、设备、存储介质,定位方法包括:获取待定位对象在目标时间段内的惯性测量数据;利用惯性测量数据以及参考运动状态信息,确定待定位对象在目标时间段内的最终运动状态信息,其中,参考运动状态信息为待定位对象在参考时间段内的最终运动状态信息;基于目标时间段内的最终运动状态信息,得到待定位对象在目标时间段内的位姿变化信息。上述方案,使用待定位对象的惯性测量数据以及参考运动状态信息,即可获取得到该对象对应的位姿变化信息,在简化定位过程的同时,也兼顾了定位的准确度。
定位方法及装置、设备、存储介质.pdf
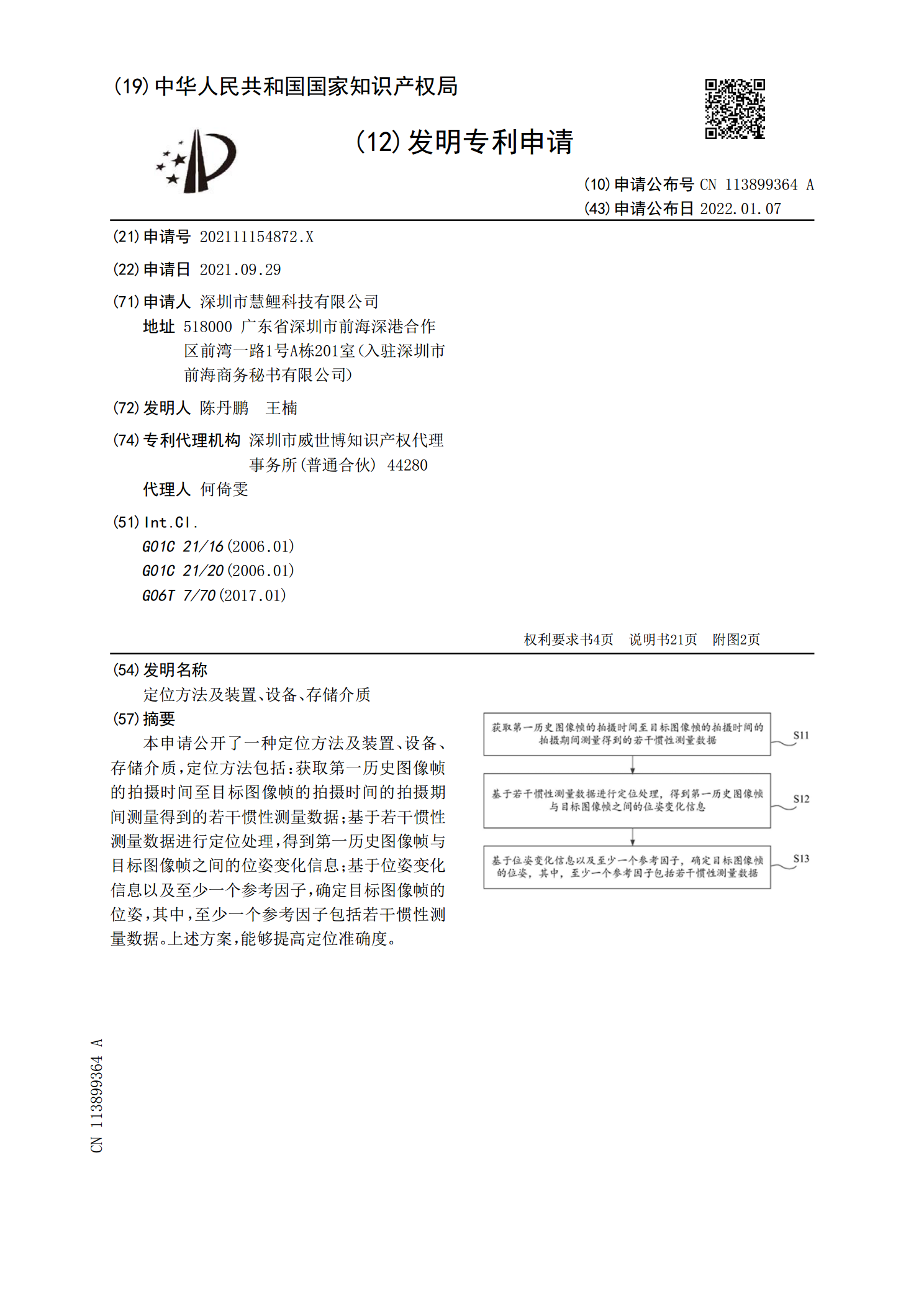
本申请公开了一种定位方法及装置、设备、存储介质,定位方法包括:获取第一历史图像帧的拍摄时间至目标图像帧的拍摄时间的拍摄期间测量得到的若干惯性测量数据;基于若干惯性测量数据进行定位处理,得到第一历史图像帧与目标图像帧之间的位姿变化信息;基于位姿变化信息以及至少一个参考因子,确定目标图像帧的位姿,其中,至少一个参考因子包括若干惯性测量数据。上述方案,能够提高定位准确度。

定位方法及装置、设备、存储介质.pdf
本申请公开了一种定位方法及装置、设备、存储介质,定位方法包括:获取目标图像帧和第一历史图像帧,以及从第一历史图像帧至目标图像帧的拍摄期间测量得到的若干惯性测量数据;基于若干惯性测量数据进行定位处理,得到第一历史图像帧与目标图像帧之间的位姿变化信息;基于位姿变化信息以及第一历史图像帧与目标图像帧的图像信息,确定目标图像帧的位姿。上述方案,能够提高定位准确度。