
基于制动踏板解耦的混合动力汽车协调再生制动控制方法.pdf

黛娥****ak

1/10
2/10
3/10

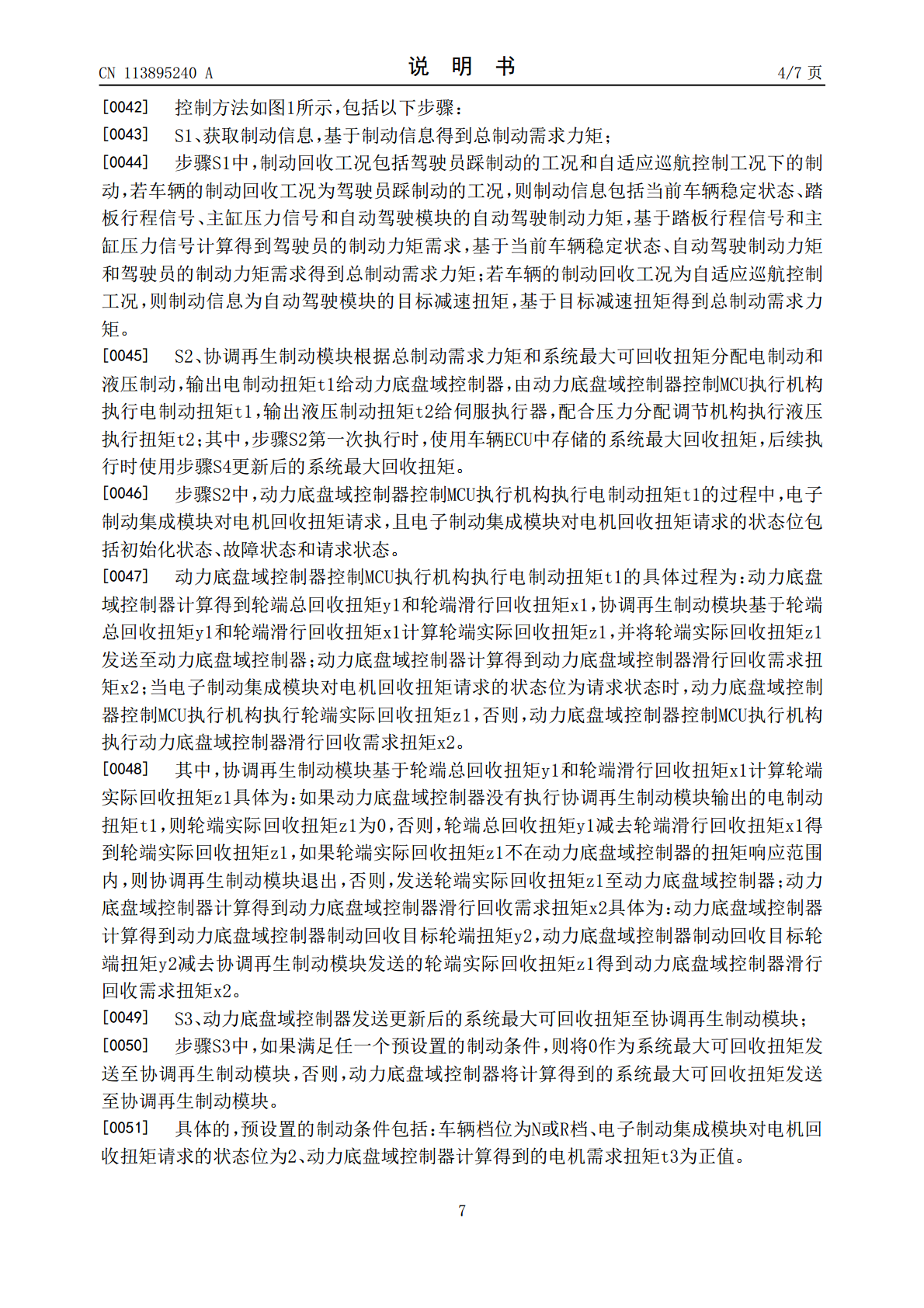
4/10

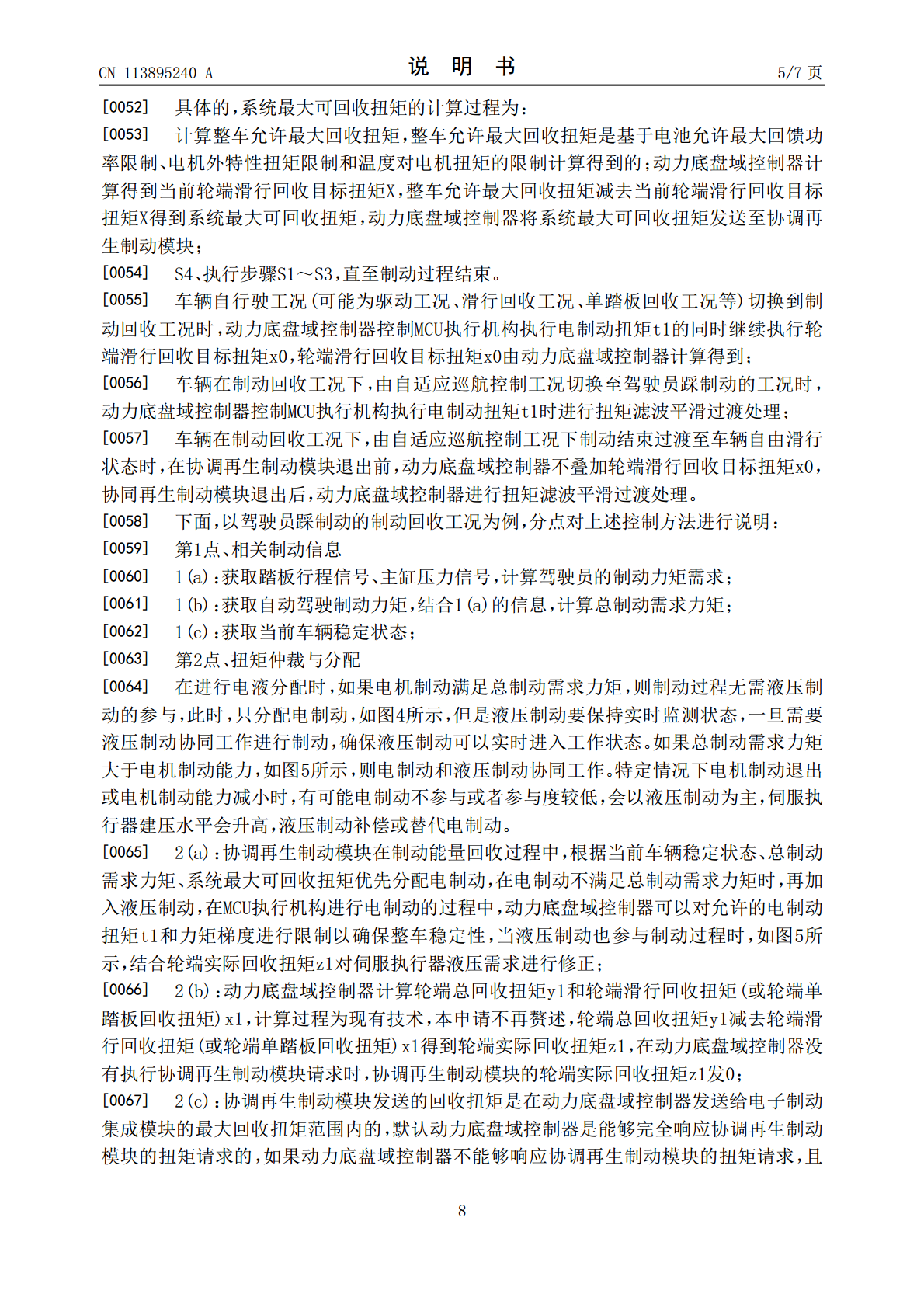
5/10
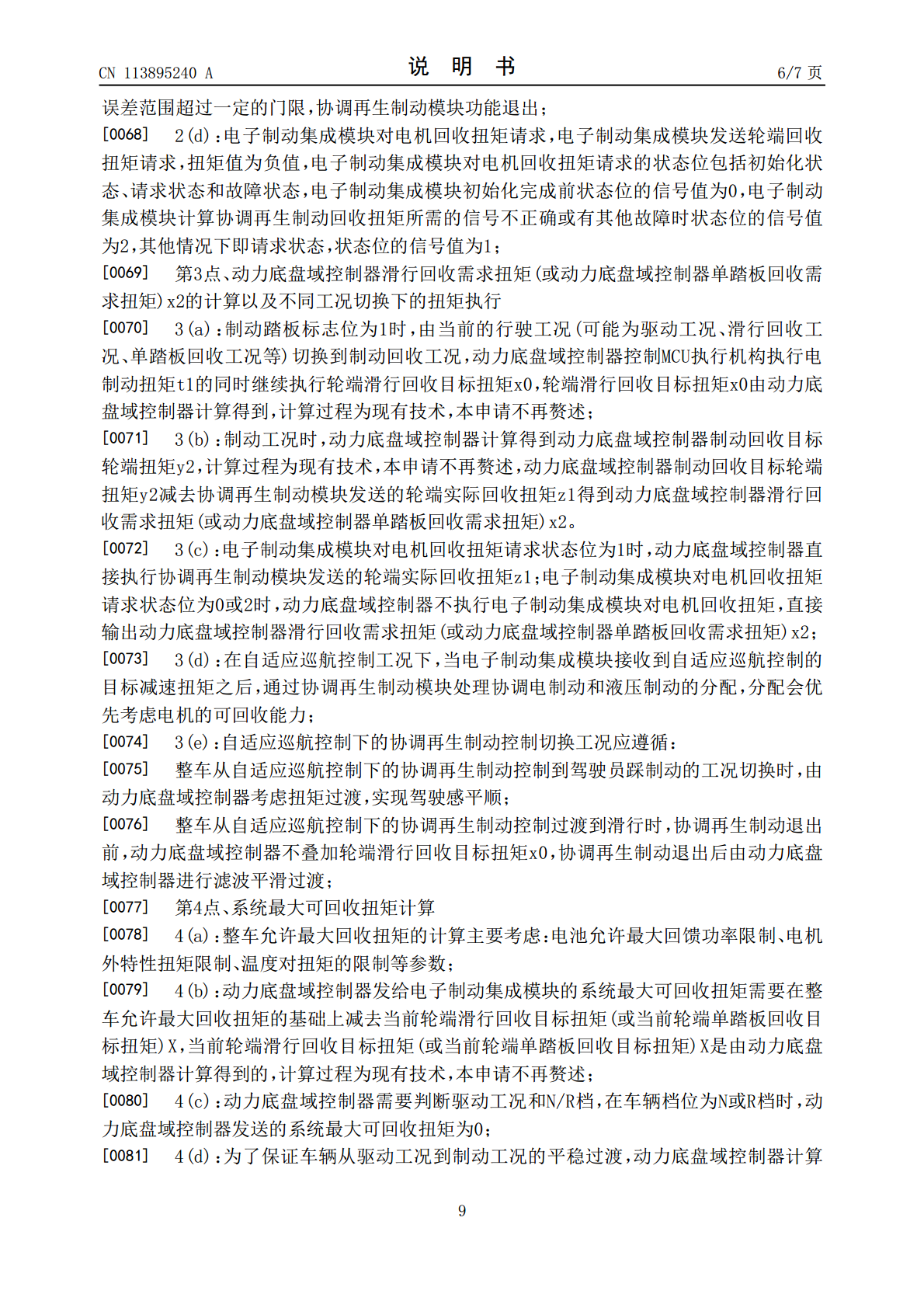
6/10
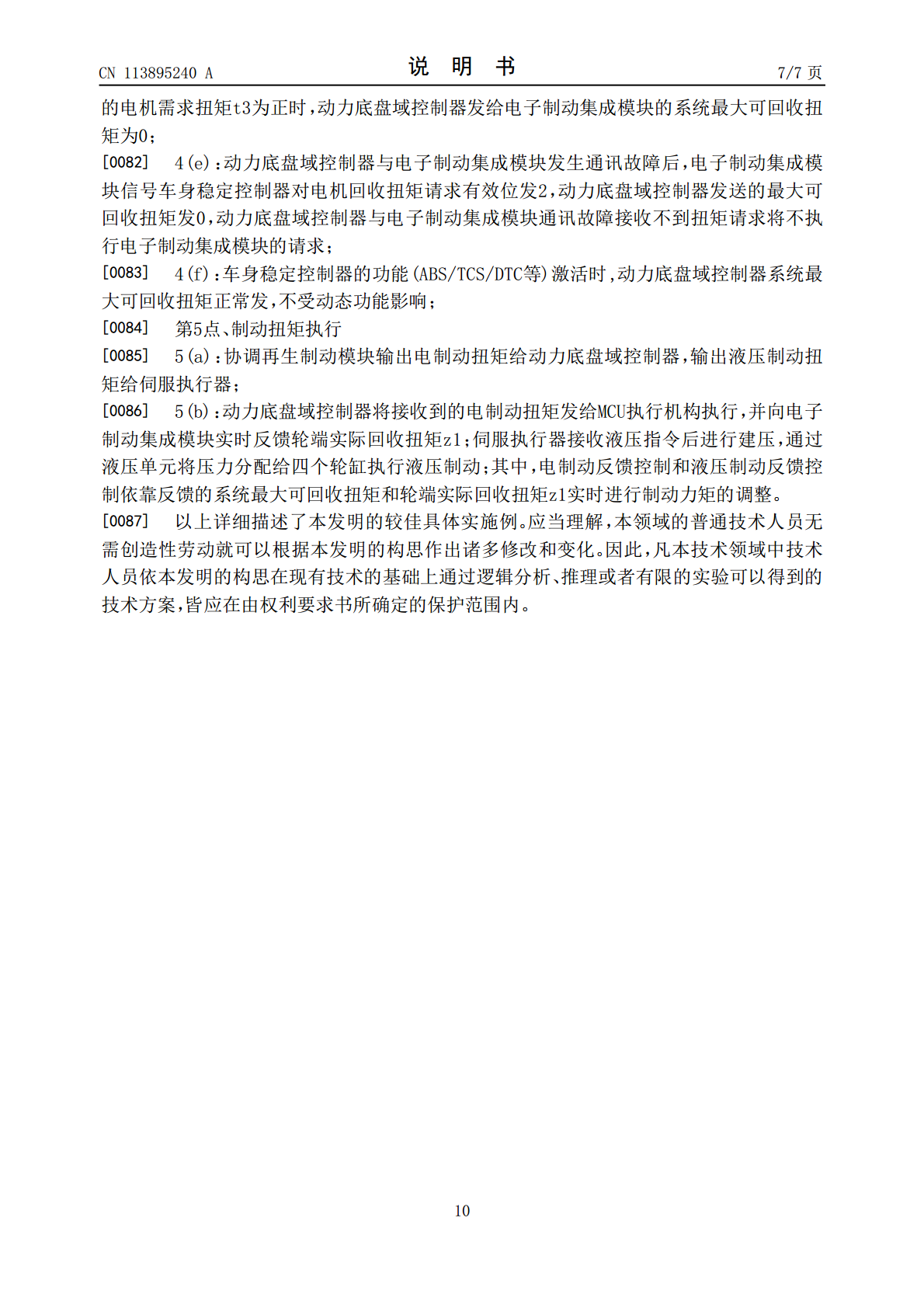
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于制动踏板解耦的混合动力汽车协调再生制动控制方法.pdf
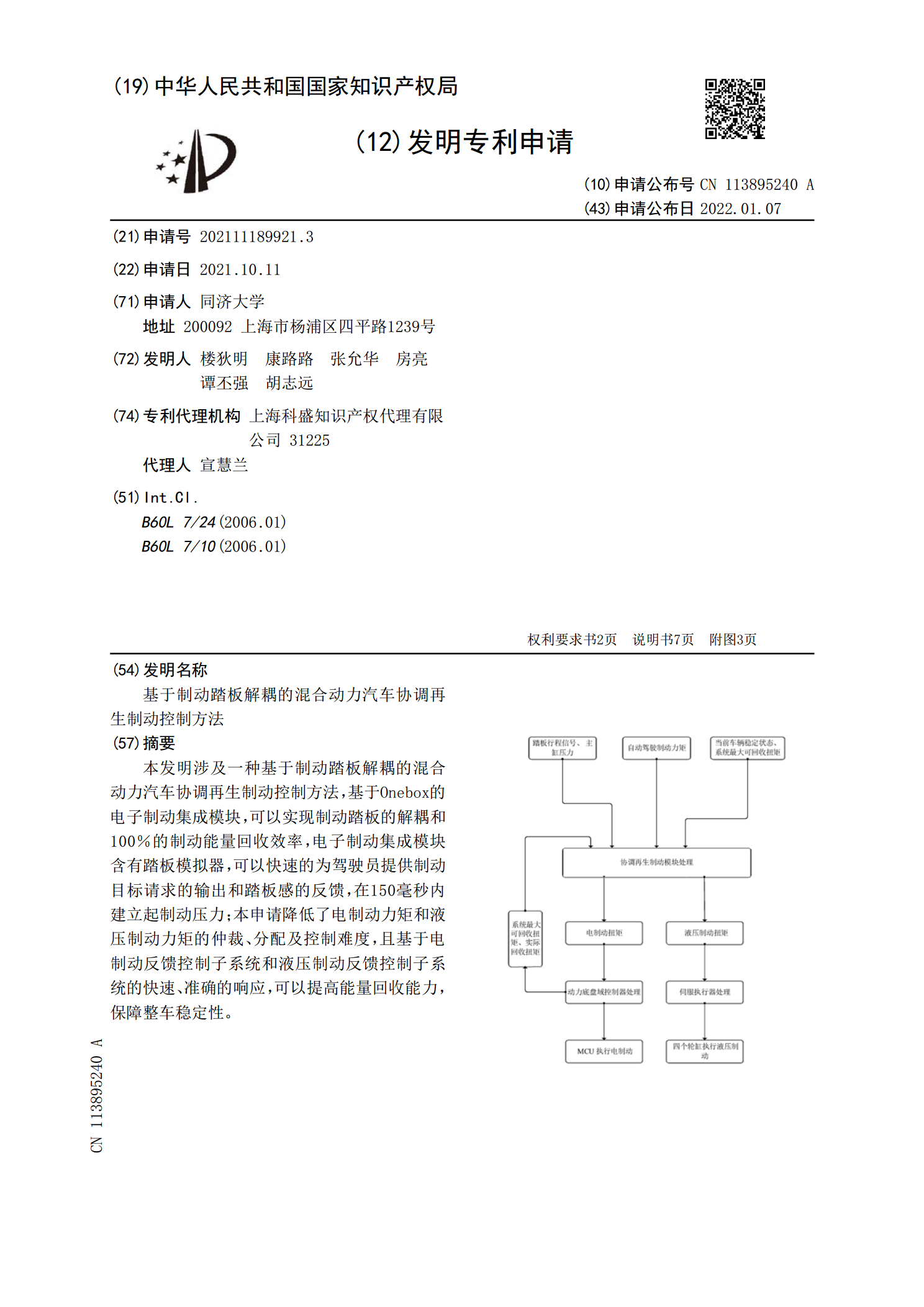
本发明涉及一种基于制动踏板解耦的混合动力汽车协调再生制动控制方法,基于Onebox的电子制动集成模块,可以实现制动踏板的解耦和100%的制动能量回收效率,电子制动集成模块含有踏板模拟器,可以快速的为驾驶员提供制动目标请求的输出和踏板感的反馈,在150毫秒内建立起制动压力;本申请降低了电制动力矩和液压制动力矩的仲裁、分配及控制难度,且基于电制动反馈控制子系统和液压制动反馈控制子系统的快速、准确的响应,可以提高能量回收能力,保障整车稳定性。
基于解耦制动系统的汽车踏板感回馈的控制系统和方法.pdf
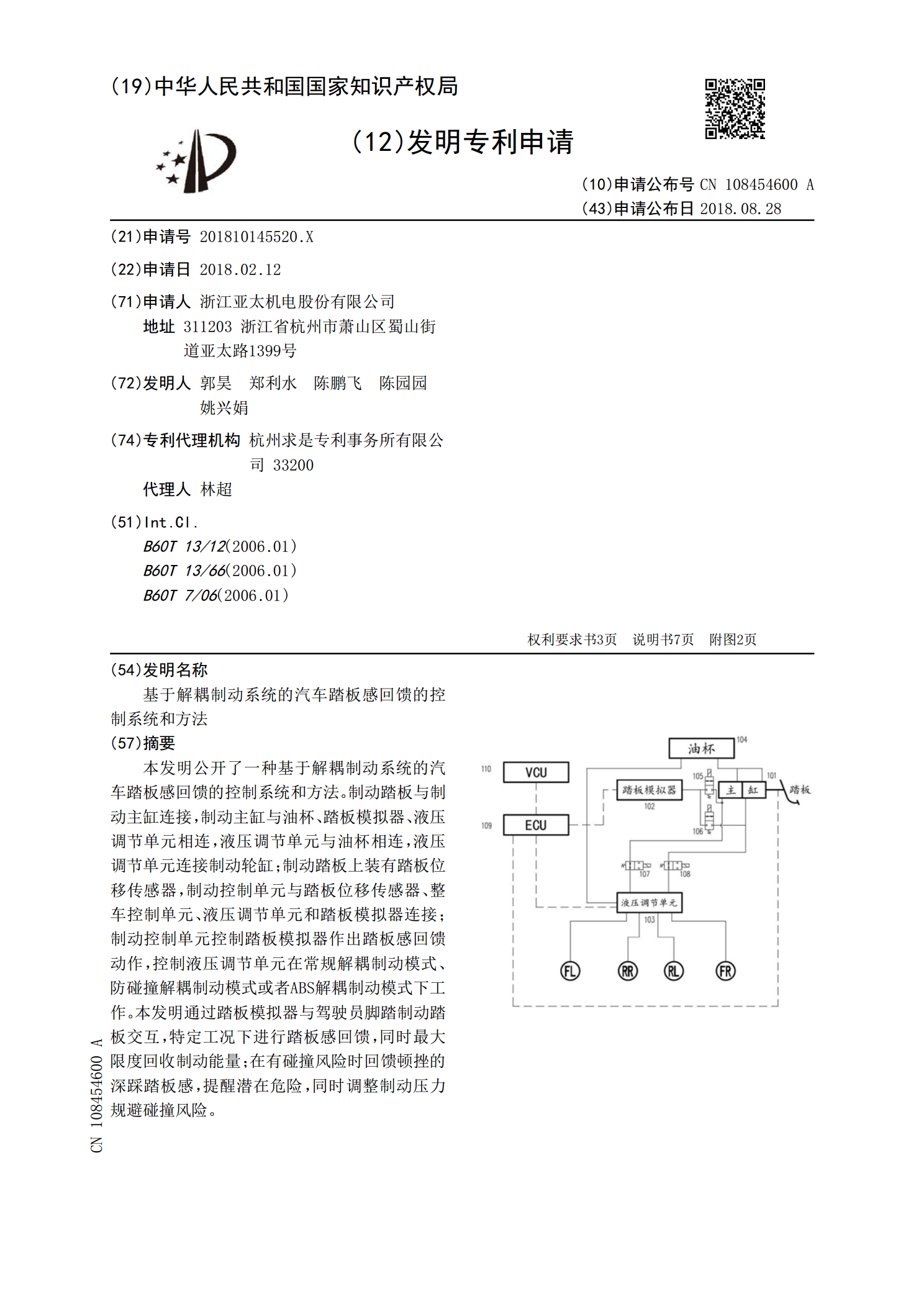
本发明公开了一种基于解耦制动系统的汽车踏板感回馈的控制系统和方法。制动踏板与制动主缸连接,制动主缸与油杯、踏板模拟器、液压调节单元相连,液压调节单元与油杯相连,液压调节单元连接制动轮缸;制动踏板上装有踏板位移传感器,制动控制单元与踏板位移传感器、整车控制单元、液压调节单元和踏板模拟器连接;制动控制单元控制踏板模拟器作出踏板感回馈动作,控制液压调节单元在常规解耦制动模式、防碰撞解耦制动模式或者ABS解耦制动模式下工作。本发明通过踏板模拟器与驾驶员脚踏制动踏板交互,特定工况下进行踏板感回馈,同时最大限度回收制
混合动力客车气压与再生制动协调控制方法.pdf
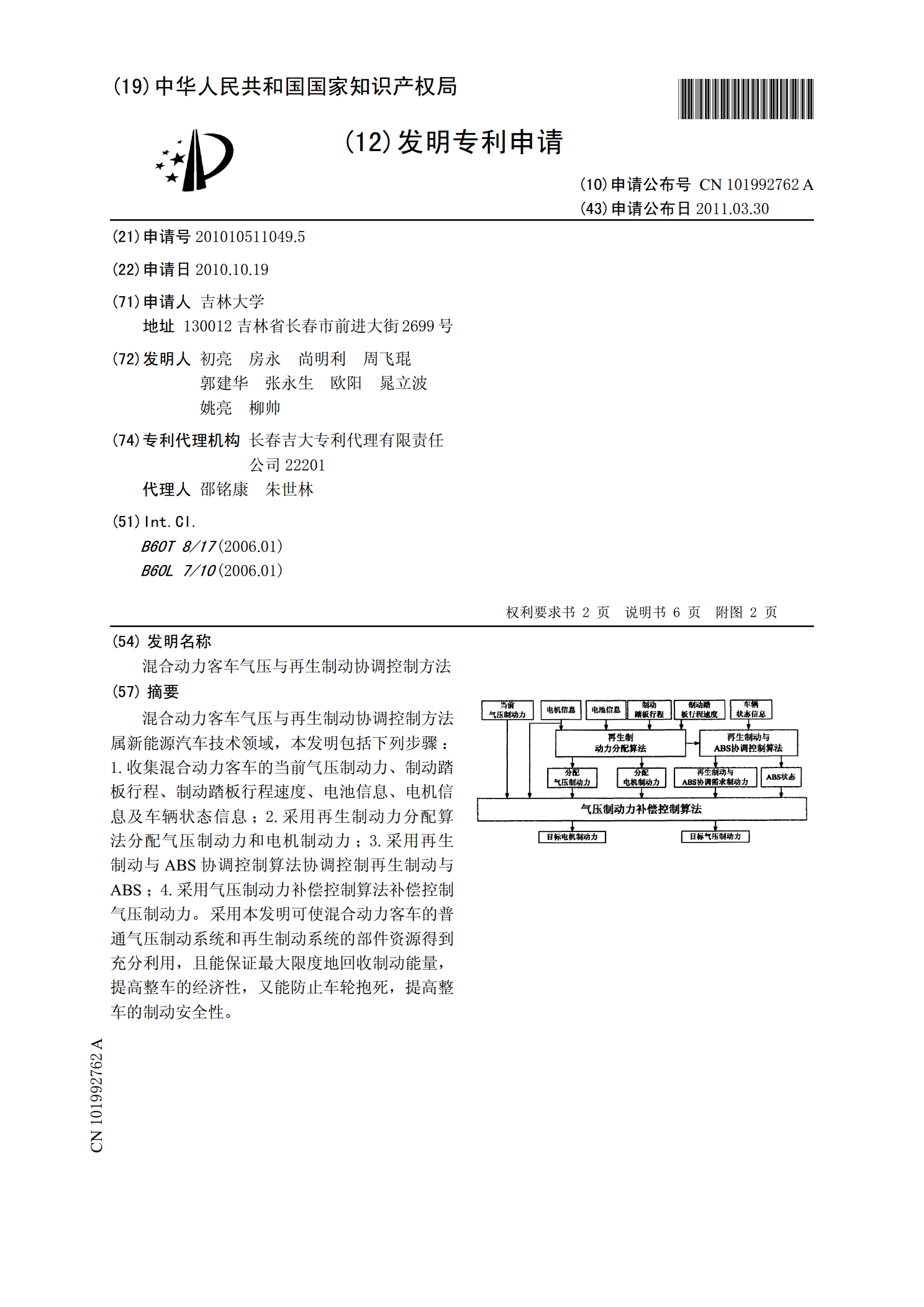
混合动力客车气压与再生制动协调控制方法属新能源汽车技术领域,本发明包括下列步骤:1.收集混合动力客车的当前气压制动力、制动踏板行程、制动踏板行程速度、电池信息、电机信息及车辆状态信息;2.采用再生制动力分配算法分配气压制动力和电机制动力;3.采用再生制动与ABS协调控制算法协调控制再生制动与ABS;4.采用气压制动力补偿控制算法补偿控制气压制动力。采用本发明可使混合动力客车的普通气压制动系统和再生制动系统的部件资源得到充分利用,且能保证最大限度地回收制动能量,提高整车的经济性,又能防止车轮抱死,提高整车的
基于Advisor的混合动力汽车再生制动控制策略仿真研究.pdf
武汉理工大学硕士学位论文基于Advisor的混合动力汽车再生制动控制策略仿真研究姓名:谈丽华申请学位级别:硕士专业:车辆工程指导教师:邓亚东20100401摘要关键词:混合动力,再生制动控制策略,Advisor,系统建模与仿真混合动力汽车结合了传统内燃机汽车和纯电动汽车各自的优点,保持了优节约能源的今天,其上分析的混合动力汽车的优点决定了在今后今后较长一段时期内,它将作为汽车新生代的主要发展方向。再生制动是混合动力汽车的一项关键节能技术,它能在车辆减速或制动过程中,在保证车辆制动性能的条件下,将车辆动能或
基于Advisor的混合动力汽车再生制动控制策略仿真研究.pdf
武汉理工大学硕士学位论文基于Advisor的混合动力汽车再生制动控制策略仿真研究姓名:谈丽华申请学位级别:硕士专业:车辆工程指导教师:邓亚东20100401摘要关键词:混合动力再生制动控制策略低辰S敕抡混合动力汽车结合了传统内燃机汽车和纯电动汽车各自的