
基于多智能体强化学习的无人机协同控制训练方法及系统.pdf

篷璐****爱吗


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于多智能体强化学习的无人机协同控制训练方法及系统.pdf
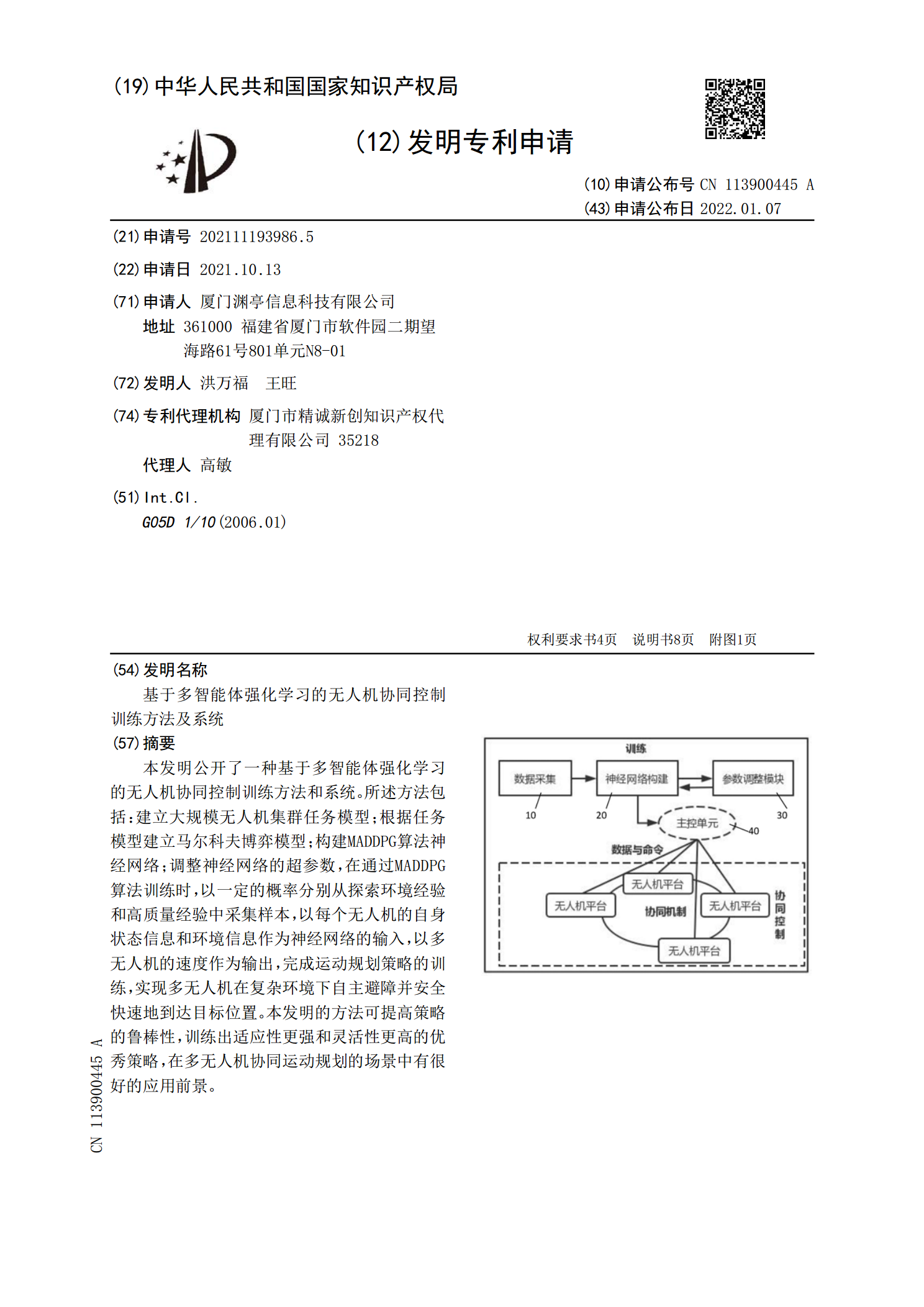
本发明公开了一种基于多智能体强化学习的无人机协同控制训练方法和系统。所述方法包括:建立大规模无人机集群任务模型;根据任务模型建立马尔科夫博弈模型;构建MADDPG算法神经网络;调整神经网络的超参数,在通过MADDPG算法训练时,以一定的概率分别从探索环境经验和高质量经验中采集样本,以每个无人机的自身状态信息和环境信息作为神经网络的输入,以多无人机的速度作为输出,完成运动规划策略的训练,实现多无人机在复杂环境下自主避障并安全快速地到达目标位置。本发明的方法可提高策略的鲁棒性,训练出适应性更强和灵活性更高的优

一种基于异构多智能体强化学习的多无人机协同突防方法.pdf
本发明公开了一种基于异构多智能体强化学习的多无人机协同突防方法,属于多智能体深度强化学习领域。本发明通过构建牵引性博弈场景和结果描述性博弈场景,初始化状态、评价神经网络参数、目标神经网络参数等超参数,对智能体进行训练。训练初始时,各无人机根据状态得到动作改变二维速度,得到新的状态,并将每回合博弈经验保存于经验池中,随机抽取样本构成学习样本,不断对智能体神经网络进行更新。当训练次数完成后,保存各神经网络参数,在评估性博弈场景中对学习效果进行验证,直到达到要求的成功率,完成协同突防任务的训练。

基于多智能体的煤矿区域协同控制系统设计.docx
基于多智能体的煤矿区域协同控制系统设计Title:DesignofaMulti-Agent-basedCoalMineAreaCollaborativeControlSystemAbstract:Inrecentyears,theminingindustryhaswitnessedsignificantadvancementsintechnologytoimprovesafetyandefficiency.Onepromisingareaisthedevelopmentofcollaborativecon

基于多智能体深度强化学习的高速公路可变限速协同控制方法.docx
基于多智能体深度强化学习的高速公路可变限速协同控制方法目录一、内容概要................................................21.1背景与意义...........................................21.2研究目标与内容.......................................4二、相关工作................................................42.1深度强化学习在交通控制

基于多智能体深度强化学习的船舶协同避碰策略.docx
基于多智能体深度强化学习的船舶协同避碰策略摘要:船舶协同避碰是航行安全的重要问题。传统的协同避碰策略主要基于规则和经验,缺乏适应性和灵活性。近年来,多智能体深度强化学习在解决协同决策问题方面取得了显著进展。本文提出了一种基于多智能体深度强化学习的船舶协同避碰策略,并进行了仿真实验验证。结果表明,该策略在不同环境下能够有效避免碰撞。引言:船舶协同避碰是保证航行安全的重要问题。传统的协同避碰策略主要基于人工设计的规则和经验,受限于船舶操作员的认知和判断能力,无法适应复杂多变的海洋环境。多智能体深度强化学习是一