
一种基于异构多智能体强化学习的多无人机协同突防方法.pdf

猫巷****忠娟


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共32页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于异构多智能体强化学习的多无人机协同突防方法.pdf
本发明公开了一种基于异构多智能体强化学习的多无人机协同突防方法,属于多智能体深度强化学习领域。本发明通过构建牵引性博弈场景和结果描述性博弈场景,初始化状态、评价神经网络参数、目标神经网络参数等超参数,对智能体进行训练。训练初始时,各无人机根据状态得到动作改变二维速度,得到新的状态,并将每回合博弈经验保存于经验池中,随机抽取样本构成学习样本,不断对智能体神经网络进行更新。当训练次数完成后,保存各神经网络参数,在评估性博弈场景中对学习效果进行验证,直到达到要求的成功率,完成协同突防任务的训练。
一种基于多智能体深度强化学习的多无人机编队集群控制方法.pdf
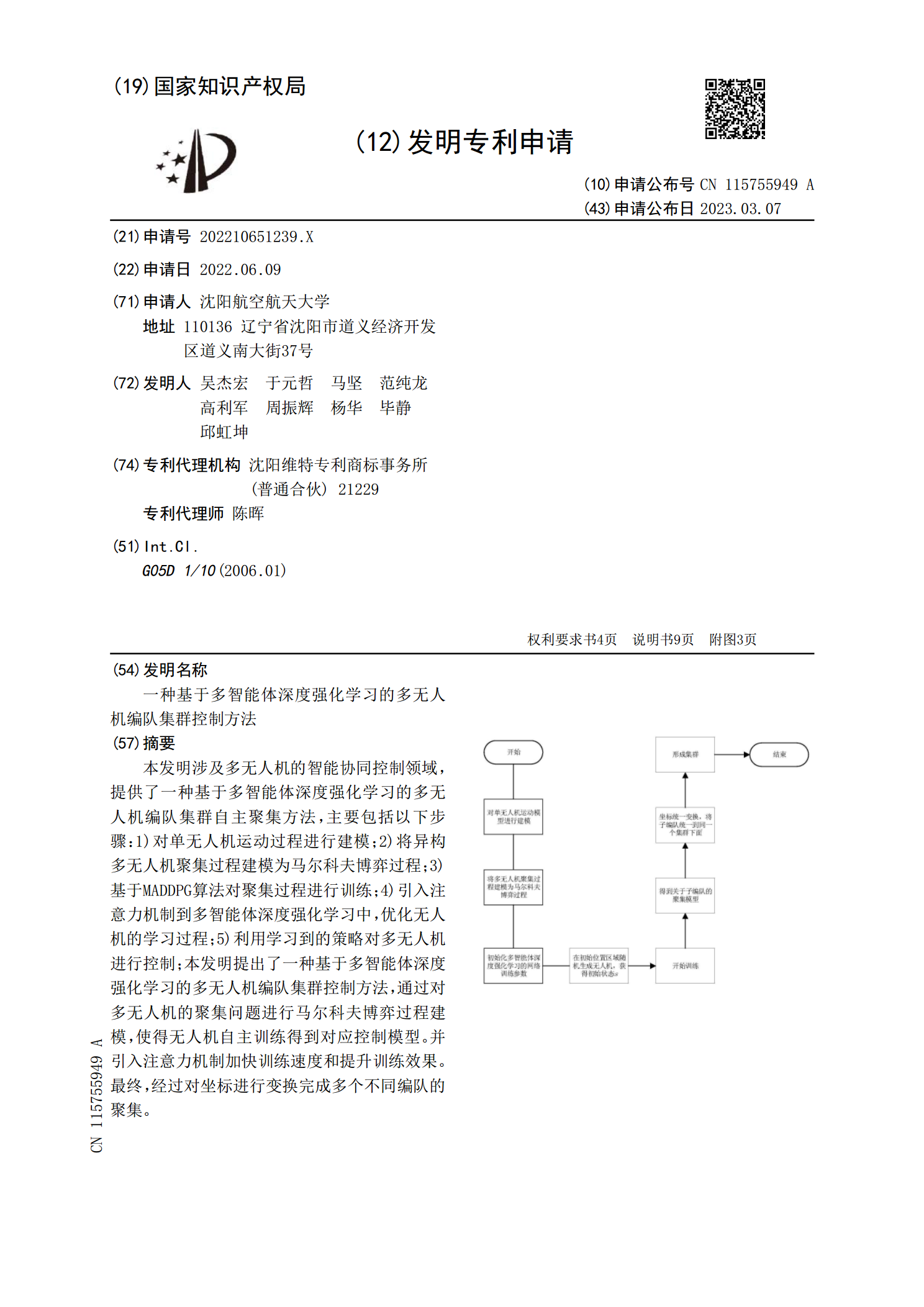
本发明涉及多无人机的智能协同控制领域,提供了一种基于多智能体深度强化学习的多无人机编队集群自主聚集方法,主要包括以下步骤:1)对单无人机运动过程进行建模;2)将异构多无人机聚集过程建模为马尔科夫博弈过程;3)基于MADDPG算法对聚集过程进行训练;4)引入注意力机制到多智能体深度强化学习中,优化无人机的学习过程;5)利用学习到的策略对多无人机进行控制;本发明提出了一种基于多智能体深度强化学习的多无人机编队集群控制方法,通过对多无人机的聚集问题进行马尔科夫博弈过程建模,使得无人机自主训练得到对应控制模型。并
基于多智能体强化学习的无人机协同控制训练方法及系统.pdf
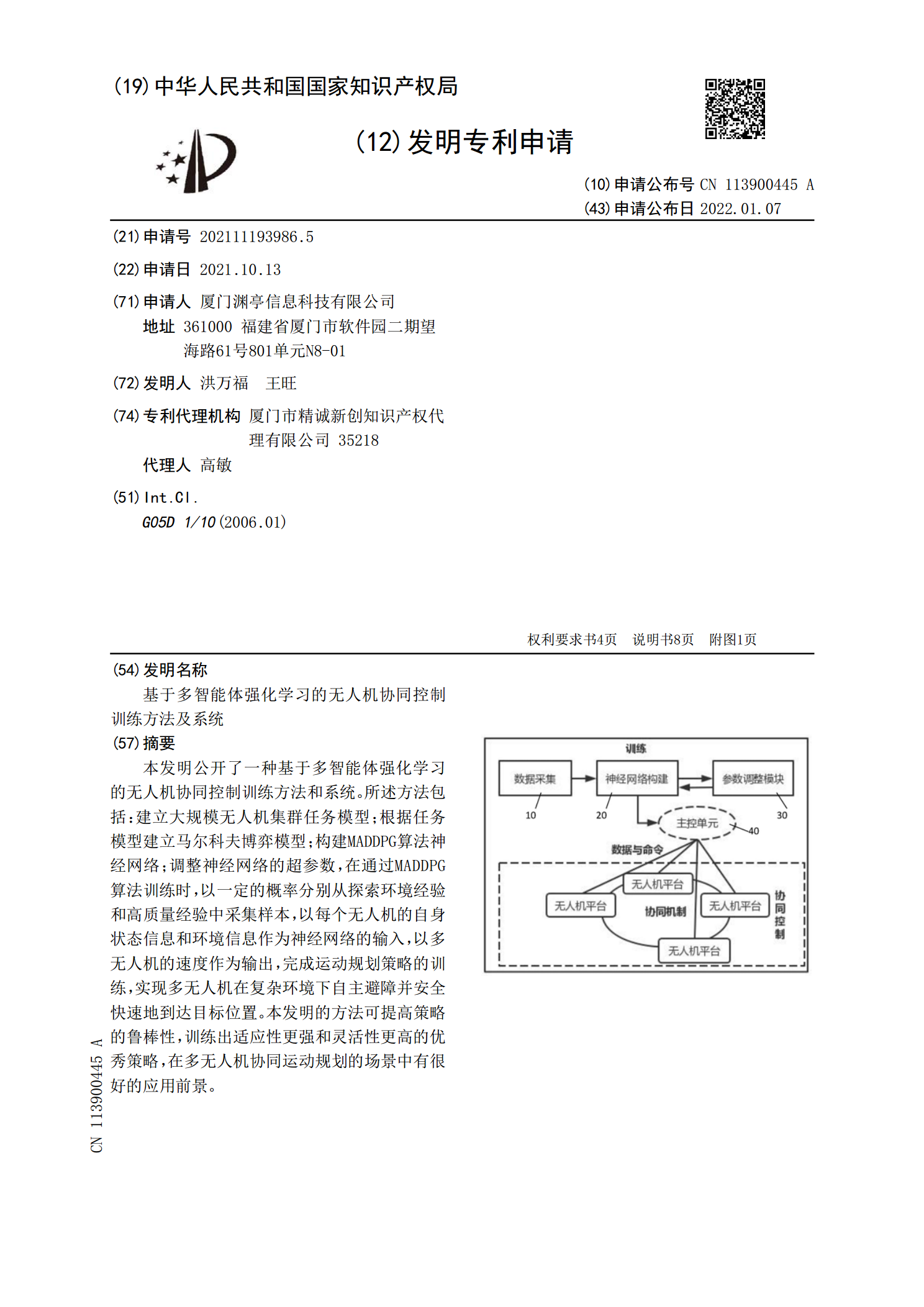
本发明公开了一种基于多智能体强化学习的无人机协同控制训练方法和系统。所述方法包括:建立大规模无人机集群任务模型;根据任务模型建立马尔科夫博弈模型;构建MADDPG算法神经网络;调整神经网络的超参数,在通过MADDPG算法训练时,以一定的概率分别从探索环境经验和高质量经验中采集样本,以每个无人机的自身状态信息和环境信息作为神经网络的输入,以多无人机的速度作为输出,完成运动规划策略的训练,实现多无人机在复杂环境下自主避障并安全快速地到达目标位置。本发明的方法可提高策略的鲁棒性,训练出适应性更强和灵活性更高的优

基于多智能体的多无人机编队算法.docx
基于多智能体的多无人机编队算法标题:基于多智能体的多无人机编队算法摘要:随着无人机技术的不断发展与普及,无人机编队技术成为一个研究热点。在许多应用场景中,多无人机编队可以提供更高效、更灵活的任务执行能力。本论文针对多无人机编队算法进行了研究,通过分析无人机编队问题的特点和挑战,提出了基于多智能体的多无人机编队算法,并进行了相关实验验证。实验结果表明,所提出的算法可以实现稳定、优化的多无人机编队控制。1.引言1.1研究背景和意义随着无人机技术的飞速发展,无人机编队日益成为无人机应用领域的研究热点之一。多无人

基于多智能体的多无人机编队算法.docx
基于多智能体的多无人机编队算法标题:基于多智能体的多无人机编队算法摘要:随着无人机技术的快速发展,多无人机系统的应用越来越广泛,如航拍、调度、搜救等。无人机编队算法是多无人机系统中的重要问题之一,其目标是使多架无人机在任务执行过程中保持协同、高效地工作。本文提出了一种基于多智能体的多无人机编队算法,以实现无人机之间的协同控制和路径规划。关键词:多无人机系统、编队算法、多智能体、路径规划、协同控制1.引言随着无人机技术的突破和应用场景的广泛,多无人机系统的研究日益受到关注。多无人机编队算法是多无人机系统的核