
基于多智能体深度强化学习的高速公路可变限速协同控制方法.docx

wk****31


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于多智能体深度强化学习的高速公路可变限速协同控制方法.docx
基于多智能体深度强化学习的高速公路可变限速协同控制方法目录一、内容概要................................................21.1背景与意义...........................................21.2研究目标与内容.......................................4二、相关工作................................................42.1深度强化学习在交通控制
基于多智能体深度强化学习的城市交通信号协同控制方法.pdf
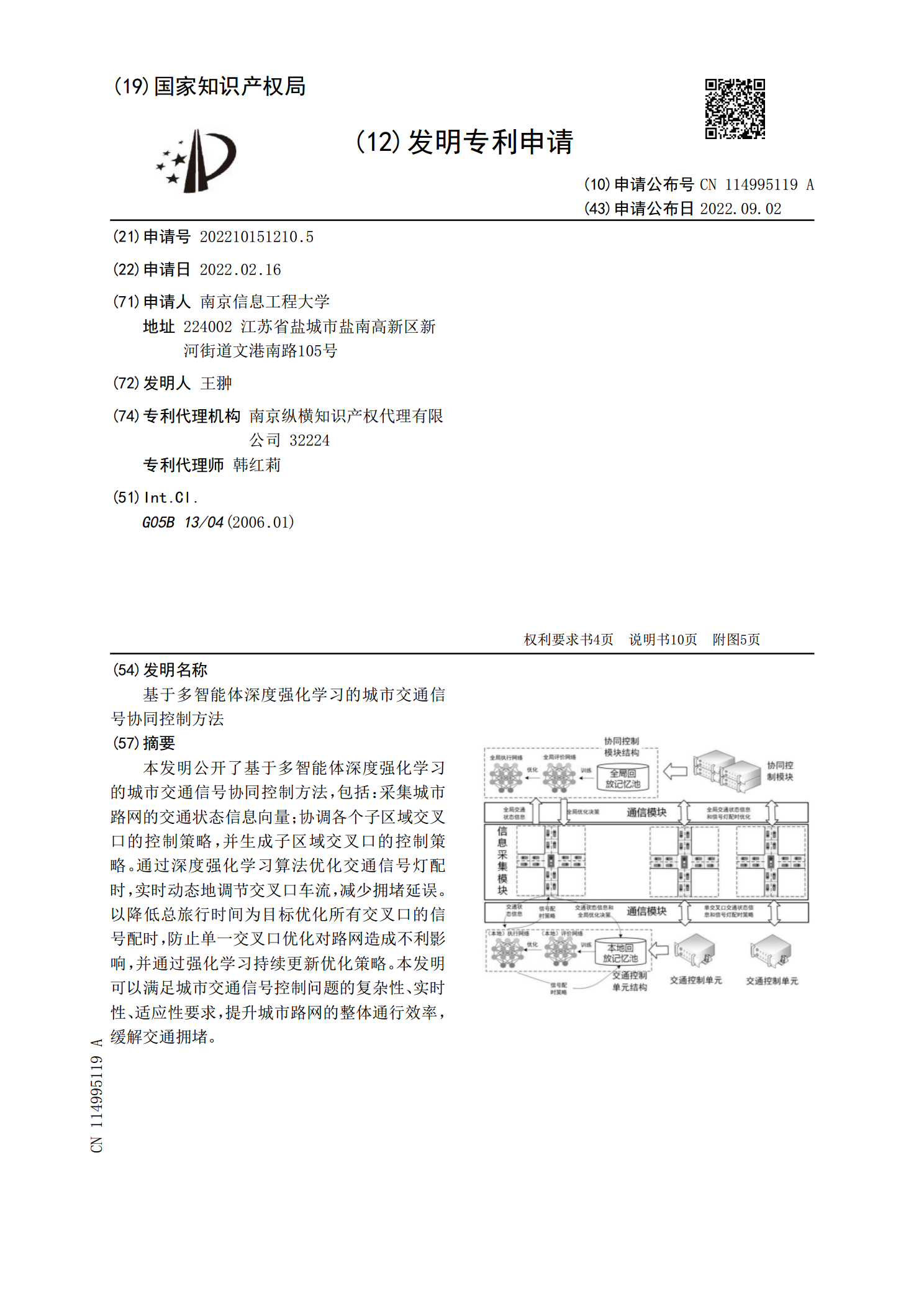
本发明公开了基于多智能体深度强化学习的城市交通信号协同控制方法,包括:采集城市路网的交通状态信息向量;协调各个子区域交叉口的控制策略,并生成子区域交叉口的控制策略。通过深度强化学习算法优化交通信号灯配时,实时动态地调节交叉口车流,减少拥堵延误。以降低总旅行时间为目标优化所有交叉口的信号配时,防止单一交叉口优化对路网造成不利影响,并通过强化学习持续更新优化策略。本发明可以满足城市交通信号控制问题的复杂性、实时性、适应性要求,提升城市路网的整体通行效率,缓解交通拥堵。

基于多智能体深度强化学习的船舶协同避碰策略.docx
基于多智能体深度强化学习的船舶协同避碰策略摘要:船舶协同避碰是航行安全的重要问题。传统的协同避碰策略主要基于规则和经验,缺乏适应性和灵活性。近年来,多智能体深度强化学习在解决协同决策问题方面取得了显著进展。本文提出了一种基于多智能体深度强化学习的船舶协同避碰策略,并进行了仿真实验验证。结果表明,该策略在不同环境下能够有效避免碰撞。引言:船舶协同避碰是保证航行安全的重要问题。传统的协同避碰策略主要基于人工设计的规则和经验,受限于船舶操作员的认知和判断能力,无法适应复杂多变的海洋环境。多智能体深度强化学习是一

基于多智能体深度强化学习的配.docx
基于多智能体深度强化学习的配目录一、内容概要................................................21.1背景与意义...........................................21.2国内外研究现状.......................................41.3研究内容与方法.......................................5二、相关理论基础........................
基于深度强化学习的多智能体攻防决策方法.pdf
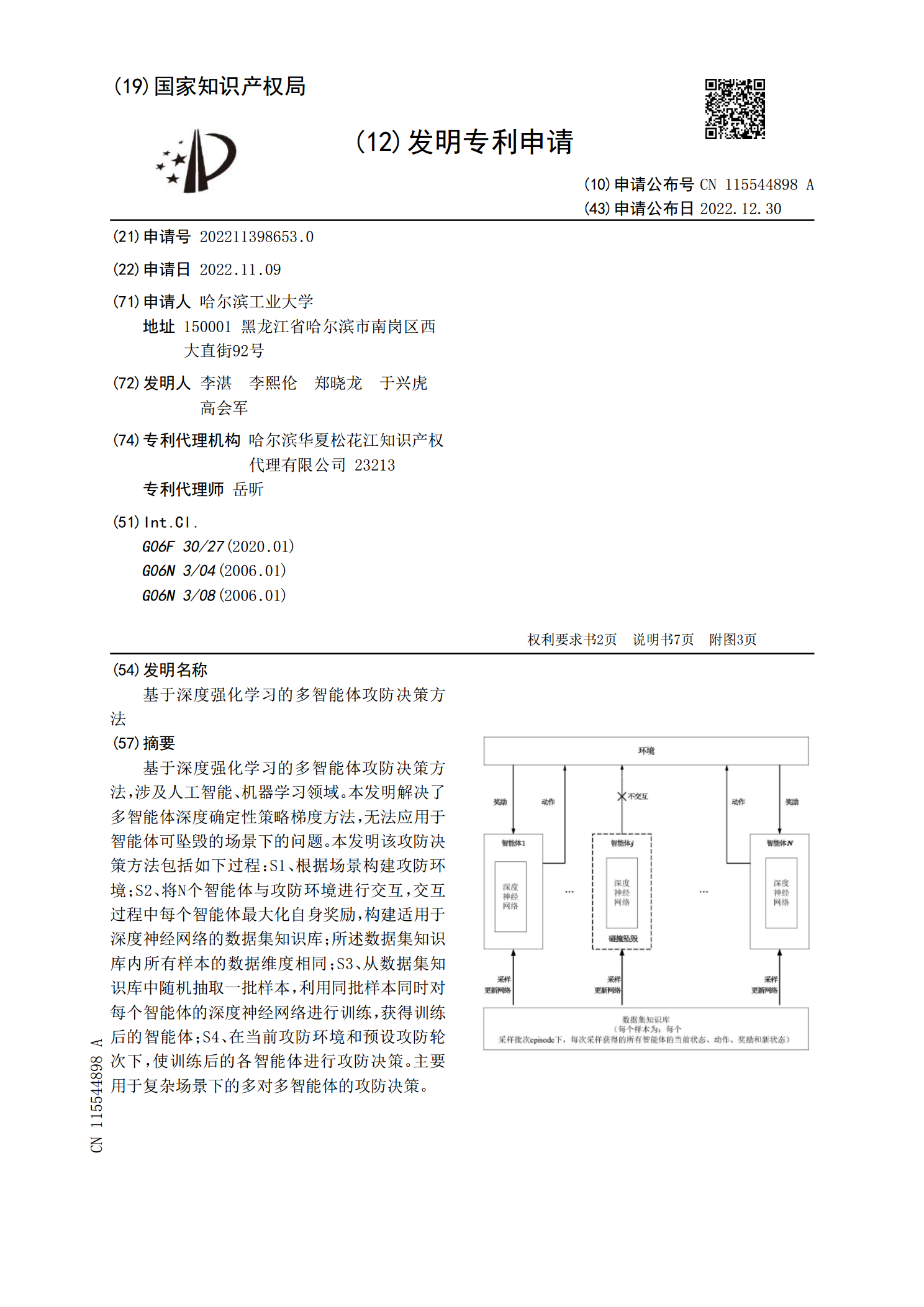
基于深度强化学习的多智能体攻防决策方法,涉及人工智能、机器学习领域。本发明解决了多智能体深度确定性策略梯度方法,无法应用于智能体可坠毁的场景下的问题。本发明该攻防决策方法包括如下过程:S1、根据场景构建攻防环境;S2、将N个智能体与攻防环境进行交互,交互过程中每个智能体最大化自身奖励,构建适用于深度神经网络的数据集知识库;所述数据集知识库内所有样本的数据维度相同;S3、从数据集知识库中随机抽取一批样本,利用同批样本同时对每个智能体的深度神经网络进行训练,获得训练后的智能体;S4、在当前攻防环境和预设攻防轮