
基于多智能体深度强化学习的船舶协同避碰策略.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于多智能体深度强化学习的船舶协同避碰策略.docx
基于多智能体深度强化学习的船舶协同避碰策略摘要:船舶协同避碰是航行安全的重要问题。传统的协同避碰策略主要基于规则和经验,缺乏适应性和灵活性。近年来,多智能体深度强化学习在解决协同决策问题方面取得了显著进展。本文提出了一种基于多智能体深度强化学习的船舶协同避碰策略,并进行了仿真实验验证。结果表明,该策略在不同环境下能够有效避免碰撞。引言:船舶协同避碰是保证航行安全的重要问题。传统的协同避碰策略主要基于人工设计的规则和经验,受限于船舶操作员的认知和判断能力,无法适应复杂多变的海洋环境。多智能体深度强化学习是一
基于数字孪生和强化学习的多智能体协同避碰采摘方法.pdf
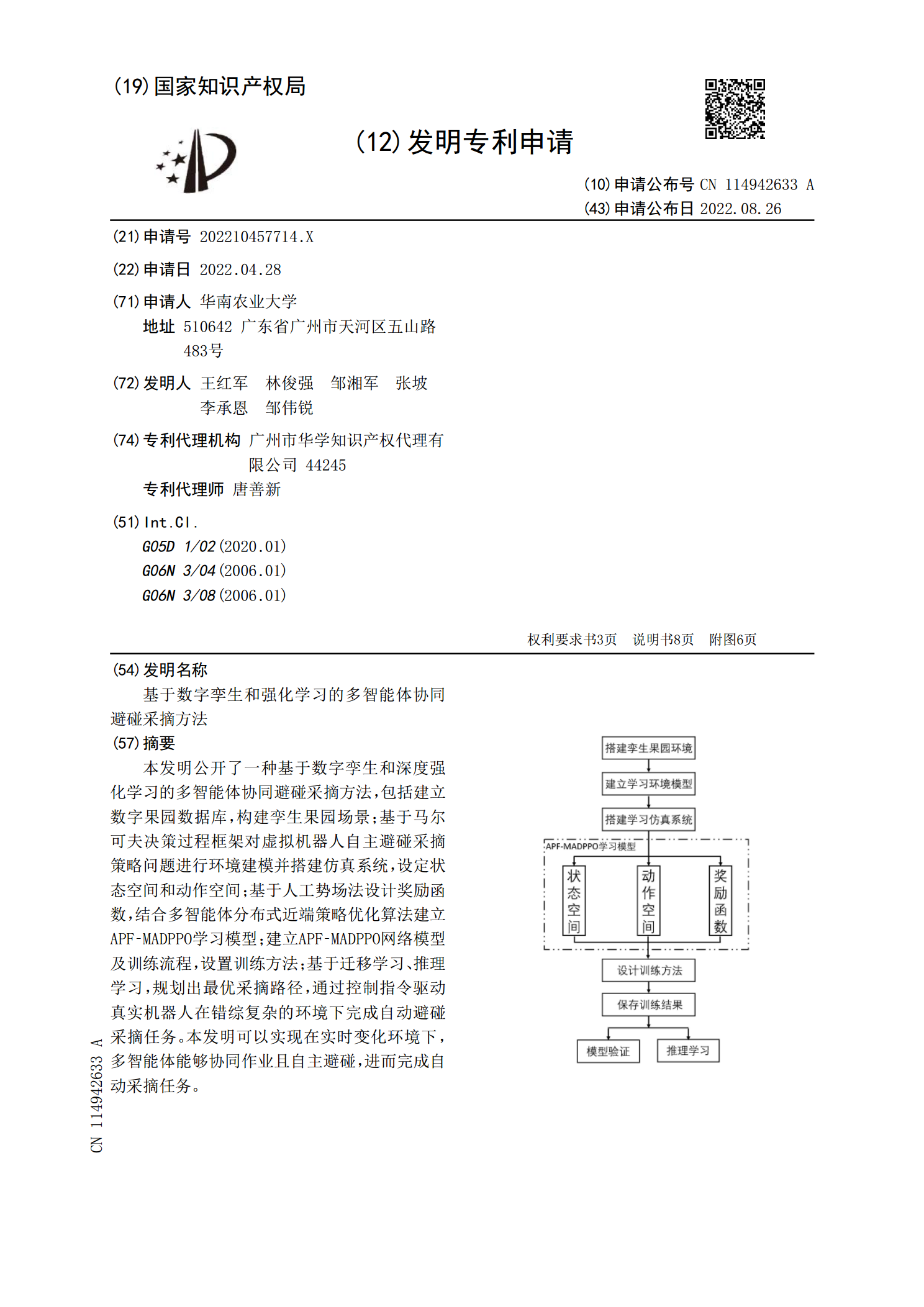
本发明公开了一种基于数字孪生和深度强化学习的多智能体协同避碰采摘方法,包括建立数字果园数据库,构建孪生果园场景;基于马尔可夫决策过程框架对虚拟机器人自主避碰采摘策略问题进行环境建模并搭建仿真系统,设定状态空间和动作空间;基于人工势场法设计奖励函数,结合多智能体分布式近端策略优化算法建立APF‑MADPPO学习模型;建立APF‑MADPPO网络模型及训练流程,设置训练方法;基于迁移学习、推理学习,规划出最优采摘路径,通过控制指令驱动真实机器人在错综复杂的环境下完成自动避碰采摘任务。本发明可以实现在实时变化环

规则约束下基于深度强化学习的船舶避碰方法.docx
规则约束下基于深度强化学习的船舶避碰方法随着船舶数量的增加和航线的复杂化,船舶避碰成为了一个非常重要的问题。一旦两艘船在航线上相撞,将会造成巨大的损失,甚至会危及人命。因此,如何有效地避免船舶碰撞是所有海事从业人员都必须考虑的问题。传统上,船舶避碰是由船员和船舶交通管制员来处理的。但是,这种方法存在许多缺点。首先,只有人类的思维和判断能力,难以完整、准确并实时地识别和控制避碰行动。其次,由于人类的认知和决策能力受到主观能力、心理疲劳及环境因素的制约,经常会做出错误的决策。此外,考虑到目前船舶数量的急剧增长

基于强化学习的无人船舶避碰导航及控制.docx
基于强化学习的无人船舶避碰导航及控制基于强化学习的无人船舶避碰导航及控制摘要:无人船舶在近年来得到了广泛关注,但其航行中存在着避碰问题。本论文提出了一种基于强化学习的无人船舶避碰导航及控制方法。首先,介绍了无人船舶的避碰问题以及目前存在的挑战。然后,分析了强化学习在航行中的应用潜力,并提出了一种基于深度强化学习的无人船舶避碰导航及控制算法。将该算法应用于无人船舶的真实案例中,通过与传统方法进行对比实验证明了该算法的有效性。最后,展望了该研究的未来发展方向。关键词:无人船舶、避碰导航、控制、强化学习、深度强
基于船端融合数据的智能船舶协同避碰系统和方法.pdf
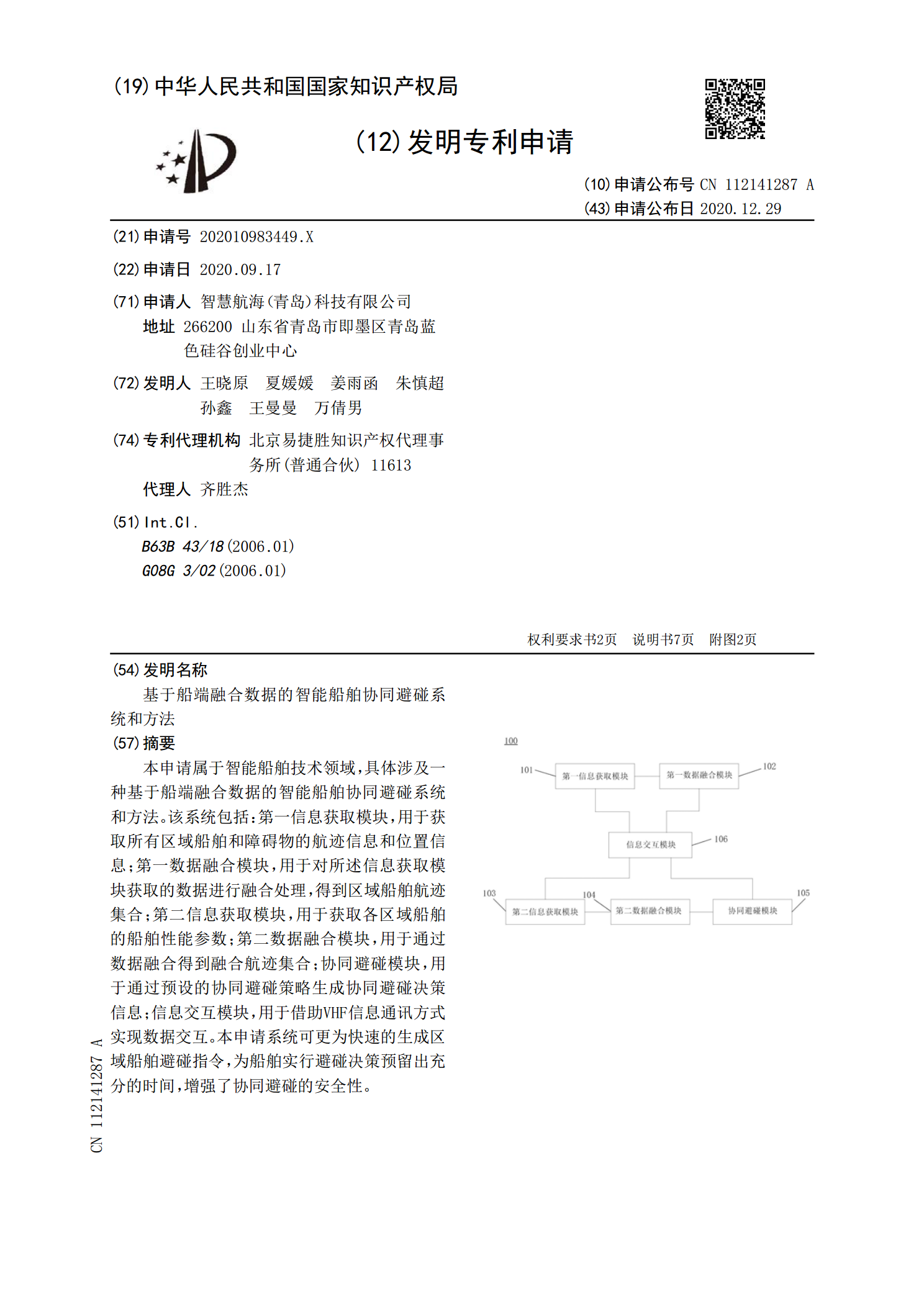
本申请属于智能船舶技术领域,具体涉及一种基于船端融合数据的智能船舶协同避碰系统和方法。该系统包括:第一信息获取模块,用于获取所有区域船舶和障碍物的航迹信息和位置信息;第一数据融合模块,用于对所述信息获取模块获取的数据进行融合处理,得到区域船舶航迹集合;第二信息获取模块,用于获取各区域船舶的船舶性能参数;第二数据融合模块,用于通过数据融合得到融合航迹集合;协同避碰模块,用于通过预设的协同避碰策略生成协同避碰决策信息;信息交互模块,用于借助VHF信息通讯方式实现数据交互。本申请系统可更为快速的生成区域船舶避碰