
多无人机轨迹规划方法、装置、无人机及存储介质.pdf

音景****ka

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多无人机轨迹规划方法、装置、无人机及存储介质.pdf
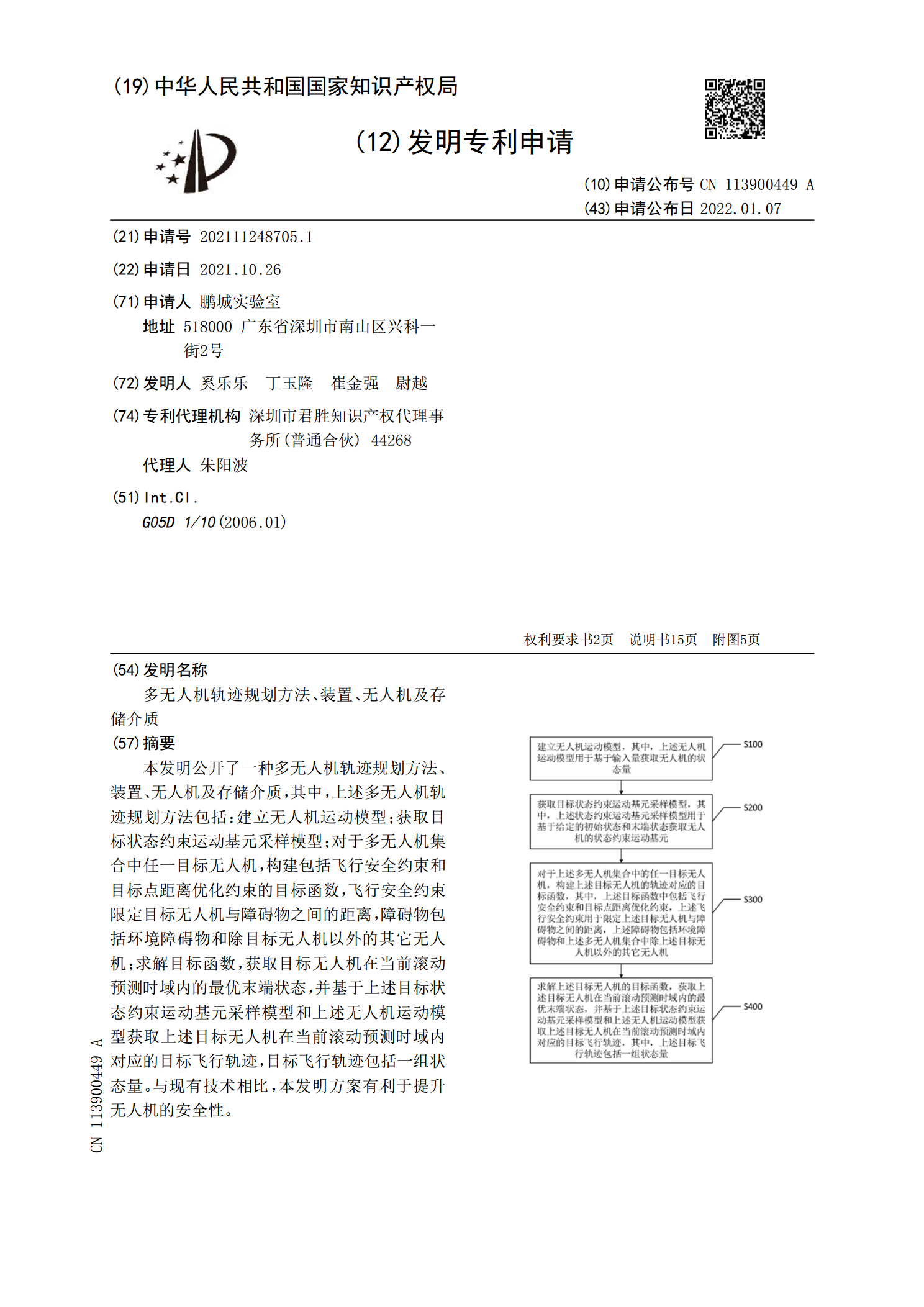
本发明公开了一种多无人机轨迹规划方法、装置、无人机及存储介质,其中,上述多无人机轨迹规划方法包括:建立无人机运动模型;获取目标状态约束运动基元采样模型;对于多无人机集合中任一目标无人机,构建包括飞行安全约束和目标点距离优化约束的目标函数,飞行安全约束限定目标无人机与障碍物之间的距离,障碍物包括环境障碍物和除目标无人机以外的其它无人机;求解目标函数,获取目标无人机在当前滚动预测时域内的最优末端状态,并基于上述目标状态约束运动基元采样模型和上述无人机运动模型获取上述目标无人机在当前滚动预测时域内对应的目标飞行
无人机的控制方法、装置、无人机及存储介质.pdf
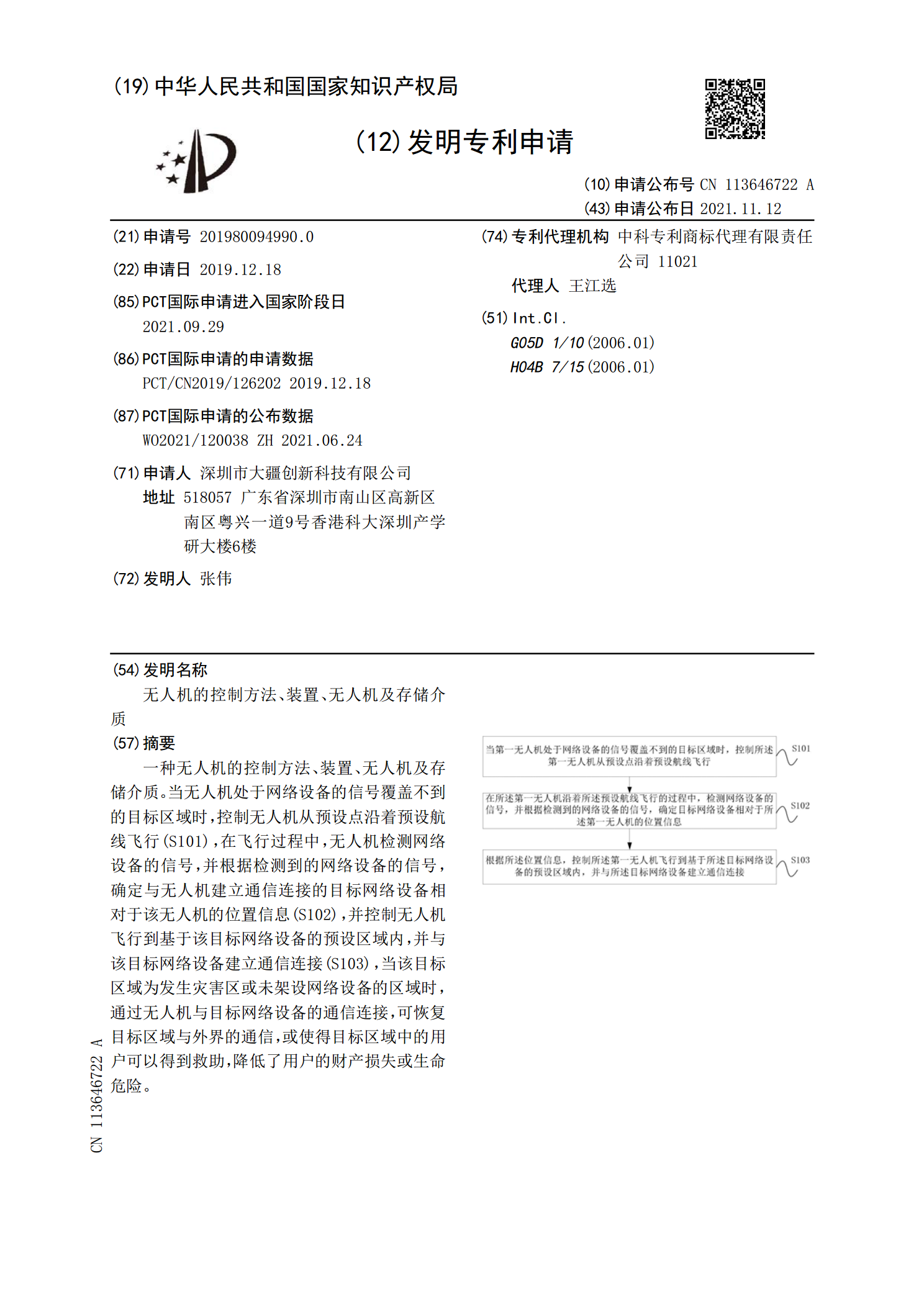
一种无人机的控制方法、装置、无人机及存储介质。当无人机处于网络设备的信号覆盖不到的目标区域时,控制无人机从预设点沿着预设航线飞行(S101),在飞行过程中,无人机检测网络设备的信号,并根据检测到的网络设备的信号,确定与无人机建立通信连接的目标网络设备相对于该无人机的位置信息(S102),并控制无人机飞行到基于该目标网络设备的预设区域内,并与该目标网络设备建立通信连接(S103),当该目标区域为发生灾害区或未架设网络设备的区域时,通过无人机与目标网络设备的通信连接,可恢复目标区域与外界的通信,或使得目标区域
无人机拍摄方法、装置、无人机及存储介质.pdf
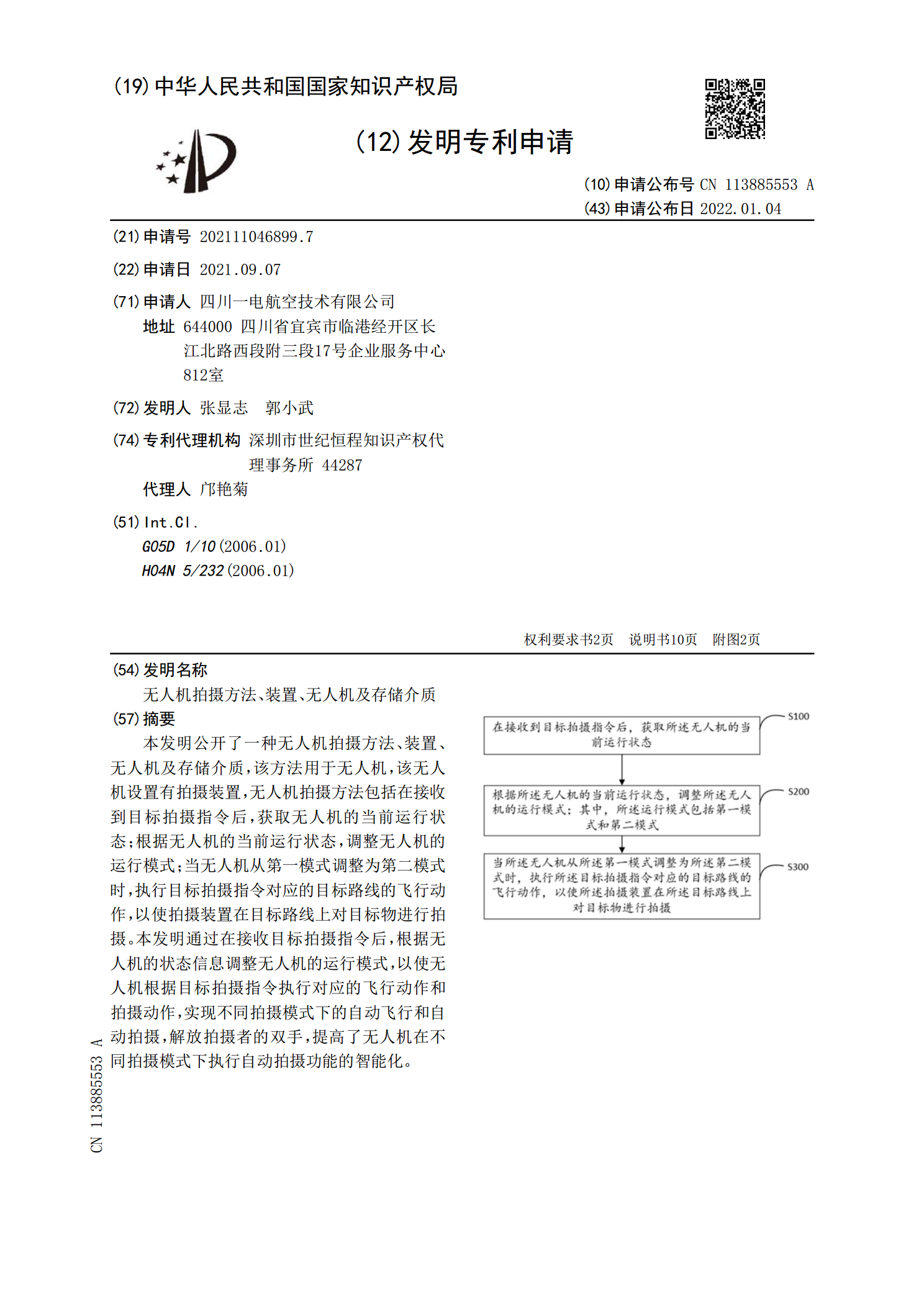
本发明公开了一种无人机拍摄方法、装置、无人机及存储介质,该方法用于无人机,该无人机设置有拍摄装置,无人机拍摄方法包括在接收到目标拍摄指令后,获取无人机的当前运行状态;根据无人机的当前运行状态,调整无人机的运行模式;当无人机从第一模式调整为第二模式时,执行目标拍摄指令对应的目标路线的飞行动作,以使拍摄装置在目标路线上对目标物进行拍摄。本发明通过在接收目标拍摄指令后,根据无人机的状态信息调整无人机的运行模式,以使无人机根据目标拍摄指令执行对应的飞行动作和拍摄动作,实现不同拍摄模式下的自动飞行和自动拍摄,解放拍
无人机控制方法、装置、无人机及存储介质.pdf
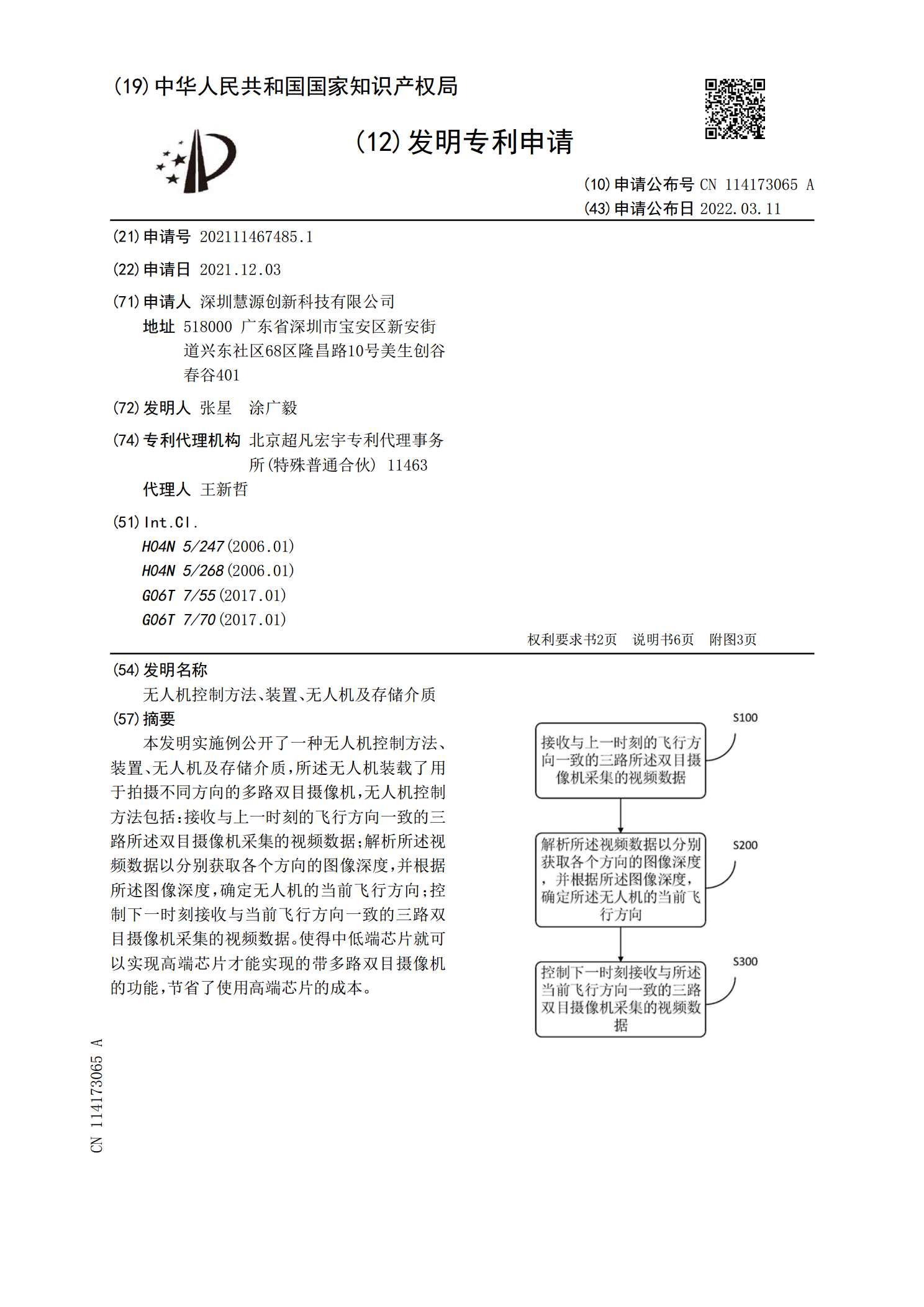
本发明实施例公开了一种无人机控制方法、装置、无人机及存储介质,所述无人机装载了用于拍摄不同方向的多路双目摄像机,无人机控制方法包括:接收与上一时刻的飞行方向一致的三路所述双目摄像机采集的视频数据;解析所述视频数据以分别获取各个方向的图像深度,并根据所述图像深度,确定无人机的当前飞行方向;控制下一时刻接收与当前飞行方向一致的三路双目摄像机采集的视频数据。使得中低端芯片就可以实现高端芯片才能实现的带多路双目摄像机的功能,节省了使用高端芯片的成本。
车辆与多无人机协同路径规划方法、装置、终端及介质.pdf
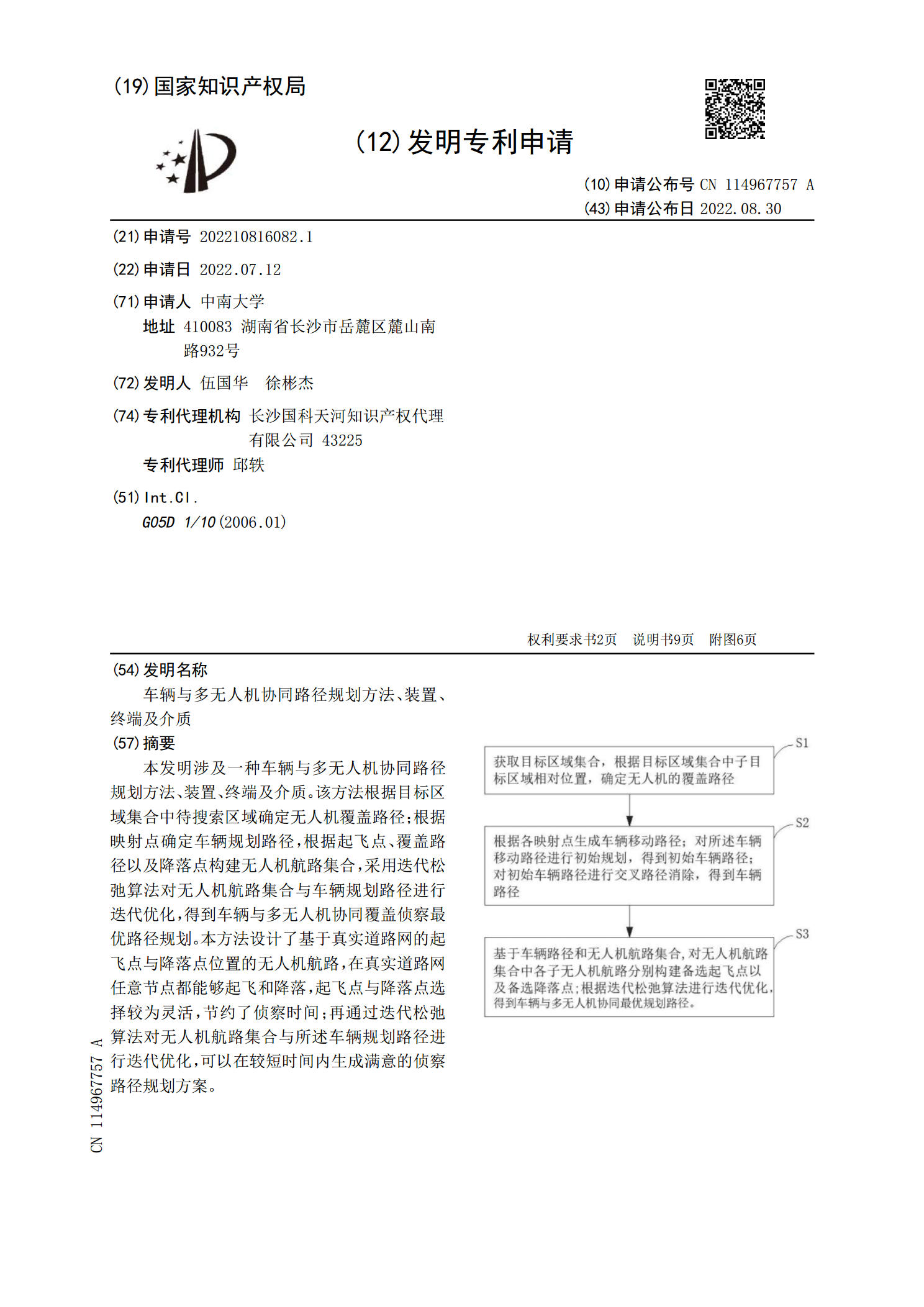
本发明涉及一种车辆与多无人机协同路径规划方法、装置、终端及介质。该方法根据目标区域集合中待搜索区域确定无人机覆盖路径;根据映射点确定车辆规划路径,根据起飞点、覆盖路径以及降落点构建无人机航路集合,采用迭代松弛算法对无人机航路集合与车辆规划路径进行迭代优化,得到车辆与多无人机协同覆盖侦察最优路径规划。本方法设计了基于真实道路网的起飞点与降落点位置的无人机航路,在真实道路网任意节点都能够起飞和降落,起飞点与降落点选择较为灵活,节约了侦察时间;再通过迭代松弛算法对无人机航路集合与所述车辆规划路径进行迭代优化,可