
电动自行车速度控制方法、装置、电动自行车及存储介质.pdf

长春****主a

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
电动自行车速度控制方法、装置、电动自行车及存储介质.pdf
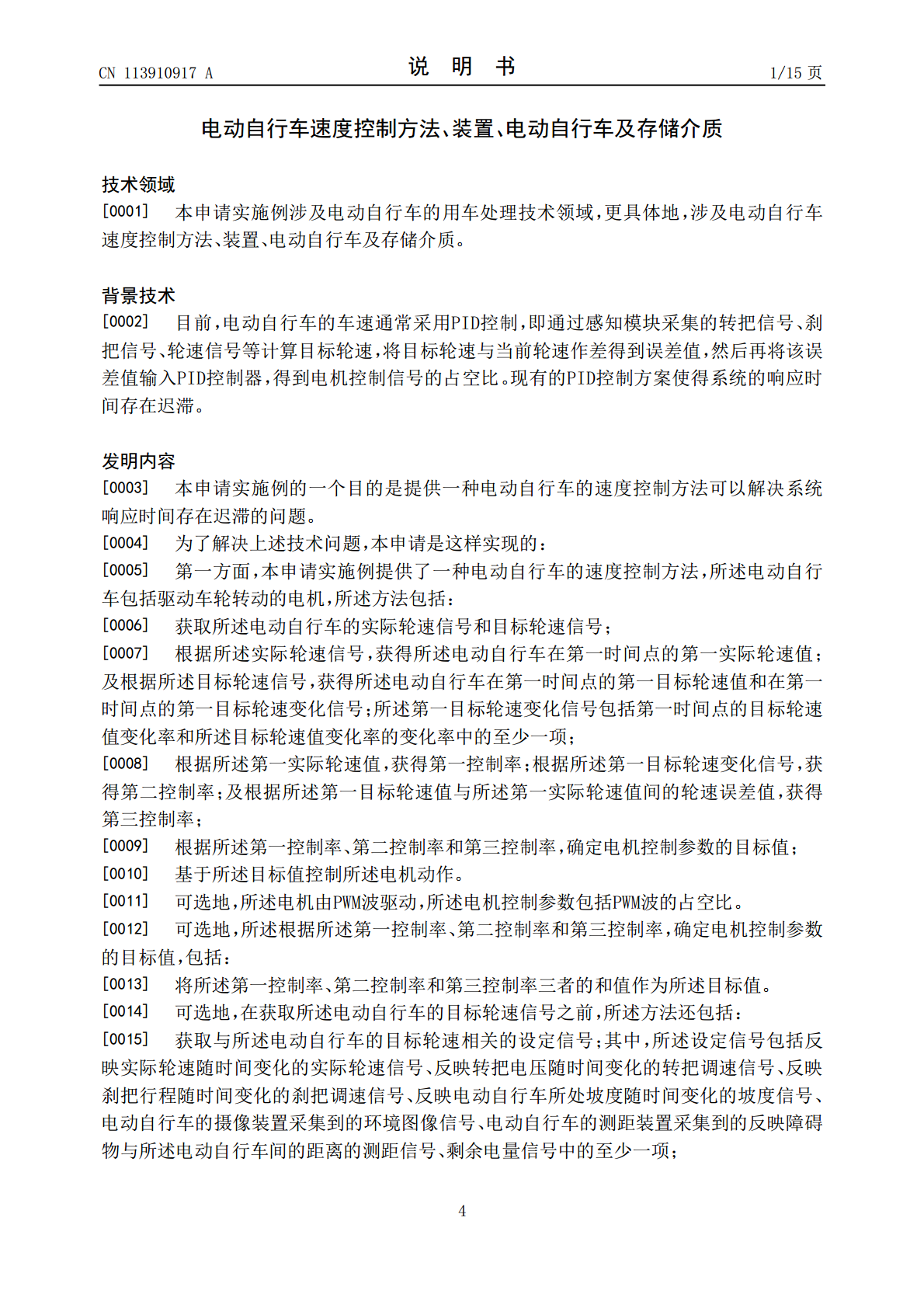
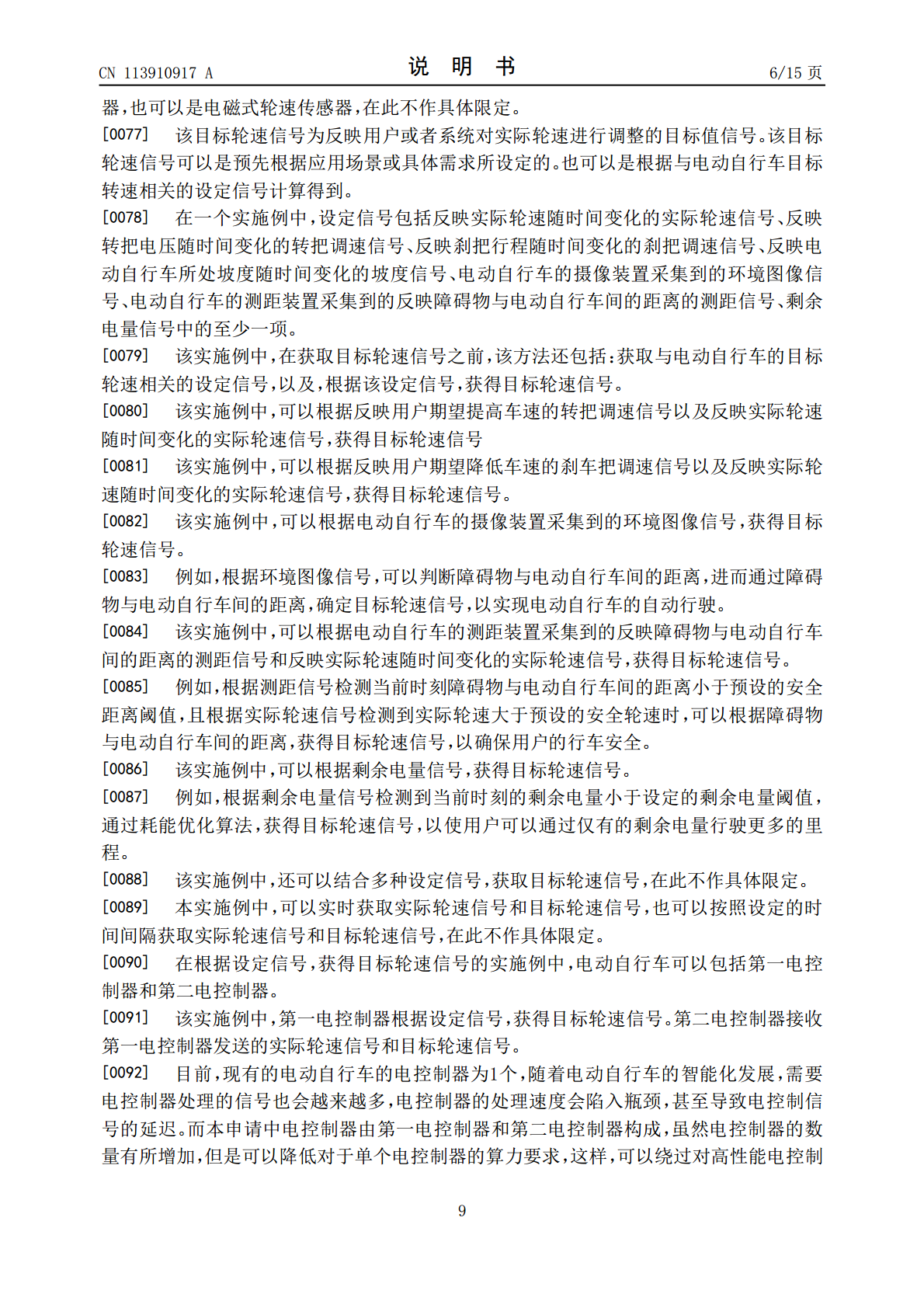
本申请提供了一种电动自行车速度控制方法、装置、电动自行车及存储介质,该法包括:获取电动自行车的实际轮速信号和目标轮速信号;根据实际轮速信号,获得电动自行车在第一时间点的第一实际轮速值;及根据目标轮速信号,获得电动自行车在第一时间点的第一目标轮速值和在第一时间点的第一目标轮速变化信号;根据第一实际轮速值,获得第一控制率;根据第一目标轮速变化信号,获得第二控制率;及根据第一目标轮速值与第一实际轮速值间的轮速误差值,获得第三控制率;根据第一控制率、第二控制率和第三控制率,确定电机控制参数的目标值;基于电机控制参
电动自行车起步控制方法、装置、电动自行车及存储介质.pdf
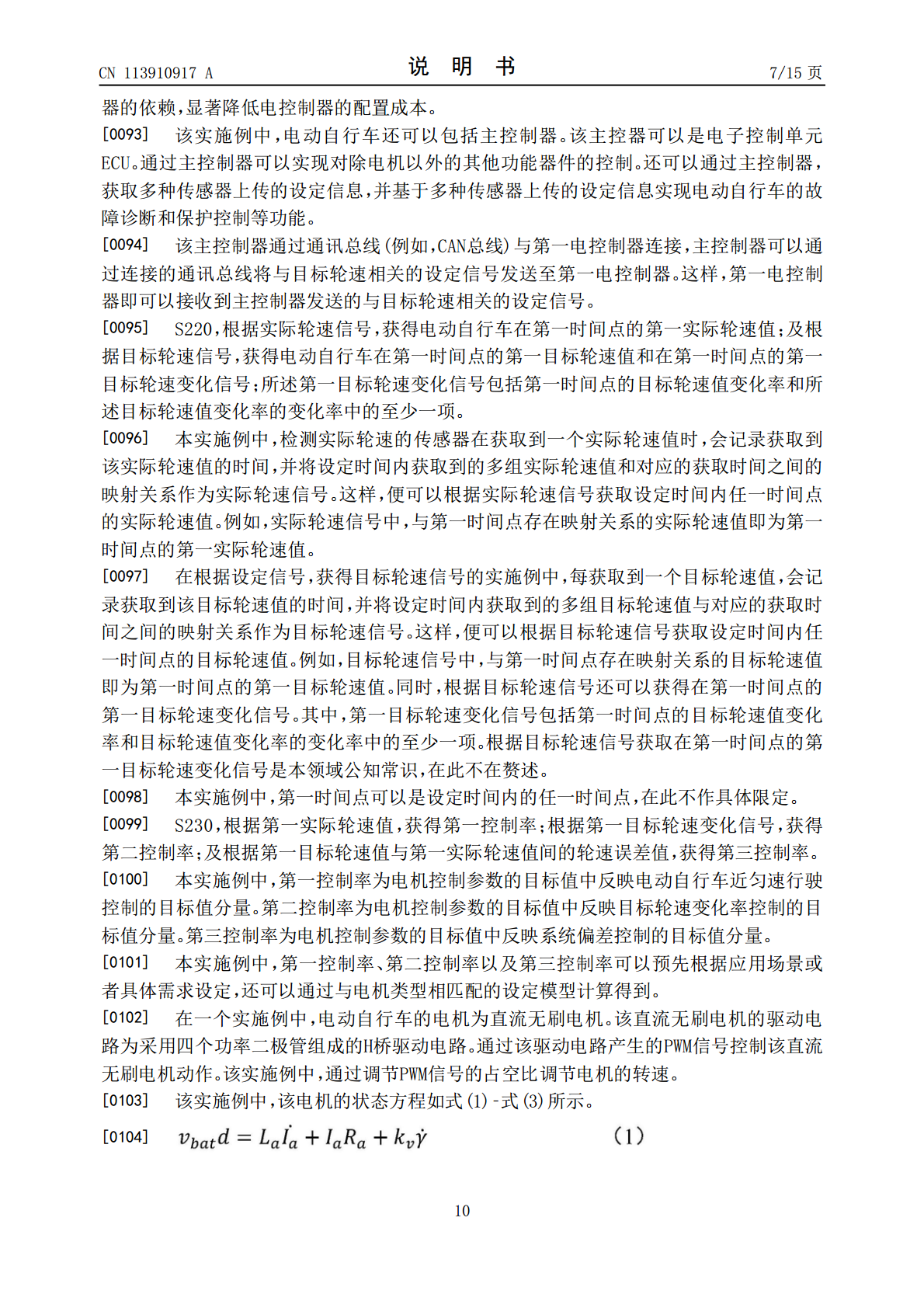
本申请涉及一种电动自行车的起步控制方法、装置、电动自行车及存储介质,其中,该控制方法包括:在所述电动自行车处于起步预备阶段,获取反映用户操作所述电动自行车的操作状态的设定信息;其中,所述起步预备阶段为接收到开锁成功信号至接收到加速信号的阶段;根据所述设定信息,确定所述用户对于所述电动自行车的使用技能级别;根据所述使用技能级别,确定与所述用户相匹配的目标起步策略;以及,响应于所述加速信号,按照所述目标起步策略控制所述电动自行车的电机动作。
电动自行车的动力调整方法、装置及电动自行车.pdf
本公开提出了一种电动自行车的动力调整方法、装置及电动自行车,所述电动自行车包括目标电器件,所述目标电器件包括电机,该方法包括:获取目标用户的属性信息;根据所述目标用户的属性信息,获得与所述目标用户的属性信息对应的目标动力模式;控制所述电机输出与所述目标动力模式匹配的动力。

电动自行车的速度踏力传感装置.pdf
本发明公开了一种电动自行车的速度踏力传感装置,包括与电动自行车枢接的受力架(1),所述受力架(1)上设置与电动自行车链条(2)啮合传动的过渡链轮(11),其特征在于所述受力架(1)上还设置有传感器(3),所述传感器(3)包括与受力架固定的霍尔座(31),所述霍尔座外侧设置的磁钢座(32),所述霍尔座与磁钢座(32)感应测定速度踏力。该装置可以进行脚踏力的检测和电动自行车速度的检测,从而实现智能的电力助力控制功能。
电动汽车控制方法、控制装置、电动汽车及存储介质.pdf
本申请公开了一种电动汽车控制方法、控制装置、电动汽车及存储介质,电动汽车控制方法,包括:获取电动汽车的泊车信息;当根据泊车信息确定电动汽车处于泊车起步状态时,确定电动汽车的驱动电机的目标扭矩,泊车起步状态用于表征电动汽车的驱动电机处于扭矩过零状态,目标扭矩小于预设过零扭矩,预设过零扭矩用于表征驱动电机在泊车起步状态下产生顿挫的扭矩阈值;根据目标扭矩控制电动汽车进行泊车。本方法实现了在电动汽车处于泊车起步状态时,根据目标扭矩控制电动汽车进行泊车,可避免驱动电机处于扭矩过零状态时因扭矩变化太快产生顿挫,增加了