
焊接的控制方法、控制装置和焊接系统.pdf

一只****呀淑

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

焊接的控制方法、控制装置和焊接系统.pdf
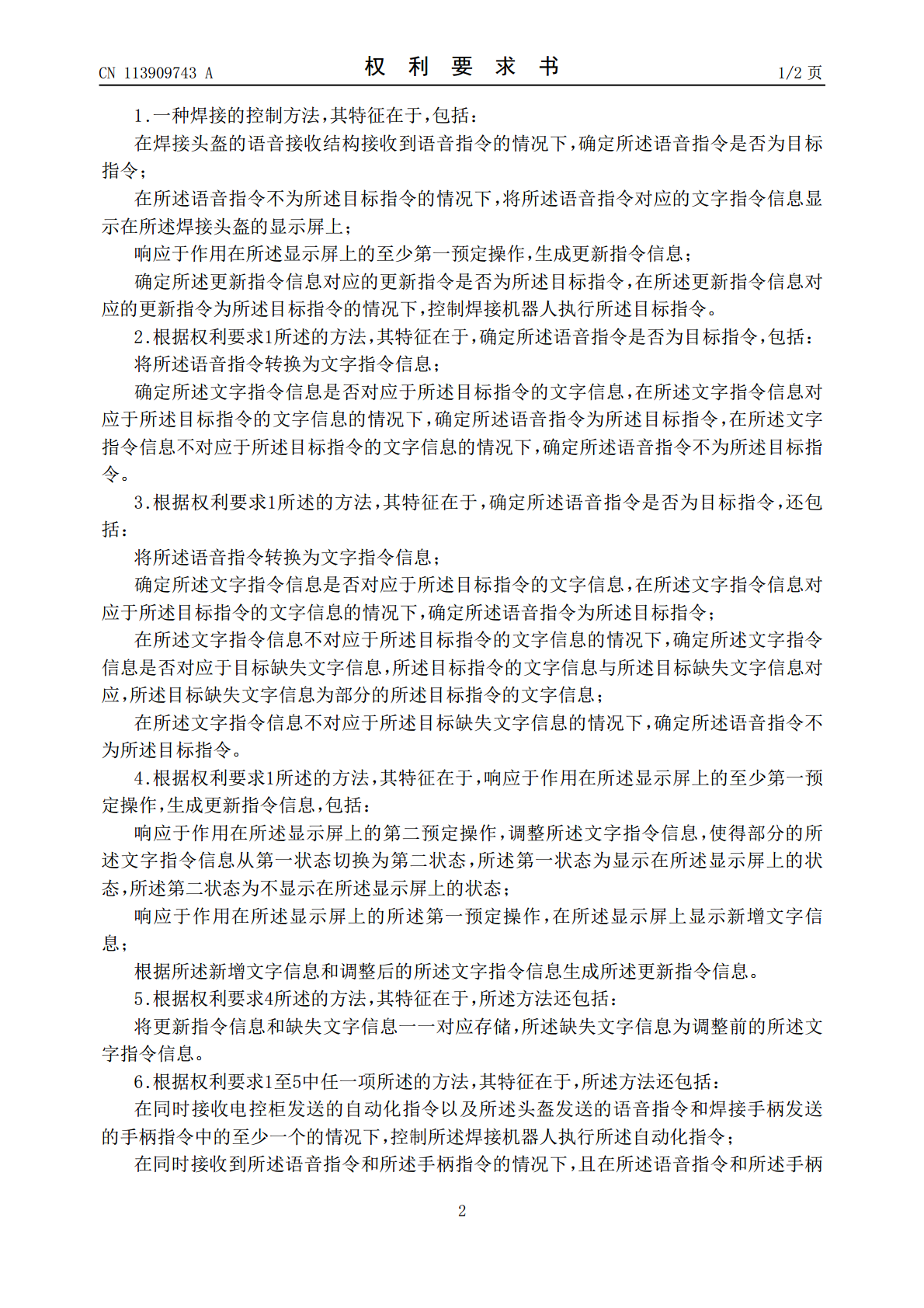
本申请提供了一种焊接的控制方法、控制装置和焊接系统。该方法包括:在焊接头盔的语音接收结构接收到语音指令的情况下,确定语音指令是否为目标指令;在语音指令不为目标指令的情况下,将语音指令对应的文字指令信息显示在焊接头盔的显示屏上;响应于作用在显示屏上的至少第一预定操作,生成更新指令信息;在更新指令信息对应的更新指令为目标指令的情况下,控制焊接机器人执行目标指令。该方法实现了通过语音控制焊接机器人,这样用户可以在电控柜控制焊接机器人不准确的情况下,通过语音辅助控制,使得焊接更加精准,同时还可以在用户的语音指令不
焊接装置、焊接装置的控制方法与控制装置.pdf
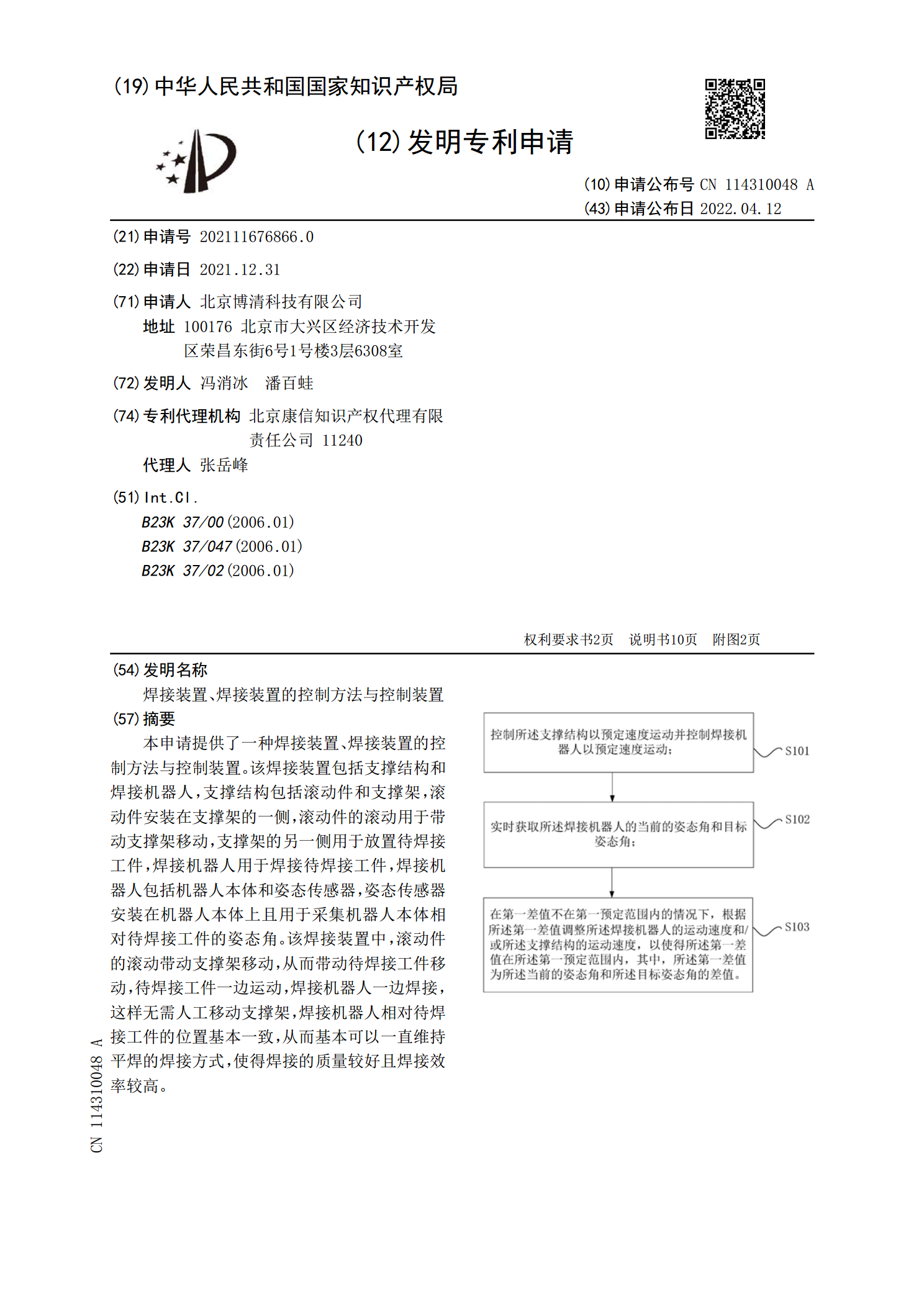
本申请提供了一种焊接装置、焊接装置的控制方法与控制装置。该焊接装置包括支撑结构和焊接机器人,支撑结构包括滚动件和支撑架,滚动件安装在支撑架的一侧,滚动件的滚动用于带动支撑架移动,支撑架的另一侧用于放置待焊接工件,焊接机器人用于焊接待焊接工件,焊接机器人包括机器人本体和姿态传感器,姿态传感器安装在机器人本体上且用于采集机器人本体相对待焊接工件的姿态角。该焊接装置中,滚动件的滚动带动支撑架移动,从而带动待焊接工件移动,待焊接工件一边运动,焊接机器人一边焊接,这样无需人工移动支撑架,焊接机器人相对待焊接工件的位

焊接系统及焊接控制方法.pdf
本发明属于焊接技术领域,具体公开了一种焊接系统及焊接控制方法,其用于将第一管件焊接于结构件,结构件形成有坡口,焊接系统包括焊接机器人、测量装置和控制装置,待所述第一管件和所述结构件预定位后,用于测量所述第一管件的第一位置信息及所述坡口的第一轮廓;控制装置被配置为能够根据所述第一位置信息及所述第一轮廓建立坡口模型,并计算得到所述第一管件的实际同轴度数据,根据所述坡口模型以及所述实际同轴度数据,并结合目标同轴度数据分析确定第一焊接工艺;并被配置为能根据坡口模型与目标同轴度分析确定第一焊接工艺,以使得焊接机器人

焊接控制方法、计算机可读存储介质和焊接控制装置.pdf
本发明提供了一种焊接控制方法、计算机可读存储介质和焊接控制装置,所述焊接控制方法包括:启动横摆机构以带动焊枪摆动,并控制焊接电源输出脉冲电流;获取横摆机构的移动位置,在所述横摆机构移动至焊缝中心时,控制所述横摆机构在焊缝中心停留第一预设时长,并且在该第一预设时长内,控制焊接电源输出第一预设恒定电流;在所述第一预设时长后,控制脉冲电源按照预设的脉冲电流参数继续输出脉冲电流。采用上述方案,通过控制横摆机构在焊缝中心停留并将脉冲电流锁定在稳定状态,便于焊丝稳定地融化并填充在焊缝中,使焊接过程得到精准地控制,有效
激光焊接系统和使用掩模控制焊接宽度的方法.pdf
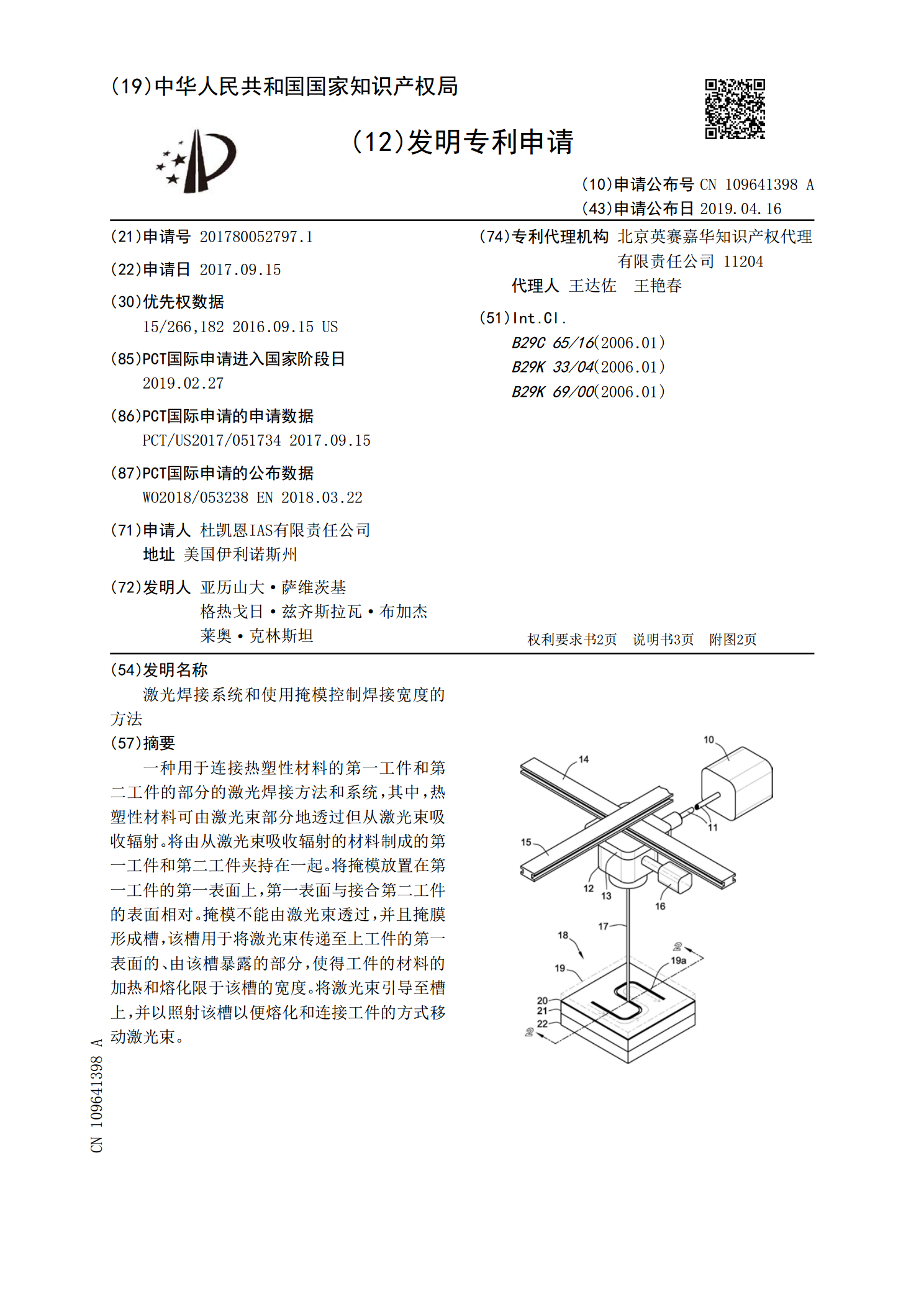
一种用于连接热塑性材料的第一工件和第二工件的部分的激光焊接方法和系统,其中,热塑性材料可由激光束部分地透过但从激光束吸收辐射。将由从激光束吸收辐射的材料制成的第一工件和第二工件夹持在一起。将掩模放置在第一工件的第一表面上,第一表面与接合第二工件的表面相对。掩模不能由激光束透过,并且掩膜形成槽,该槽用于将激光束传递至上工件的第一表面的、由该槽暴露的部分,使得工件的材料的加热和熔化限于该槽的宽度。将激光束引导至槽上,并以照射该槽以便熔化和连接工件的方式移动激光束。