
焊接装置、焊接装置的控制方法与控制装置.pdf

思洁****爱吗

1/10
2/10
3/10
4/10
5/10
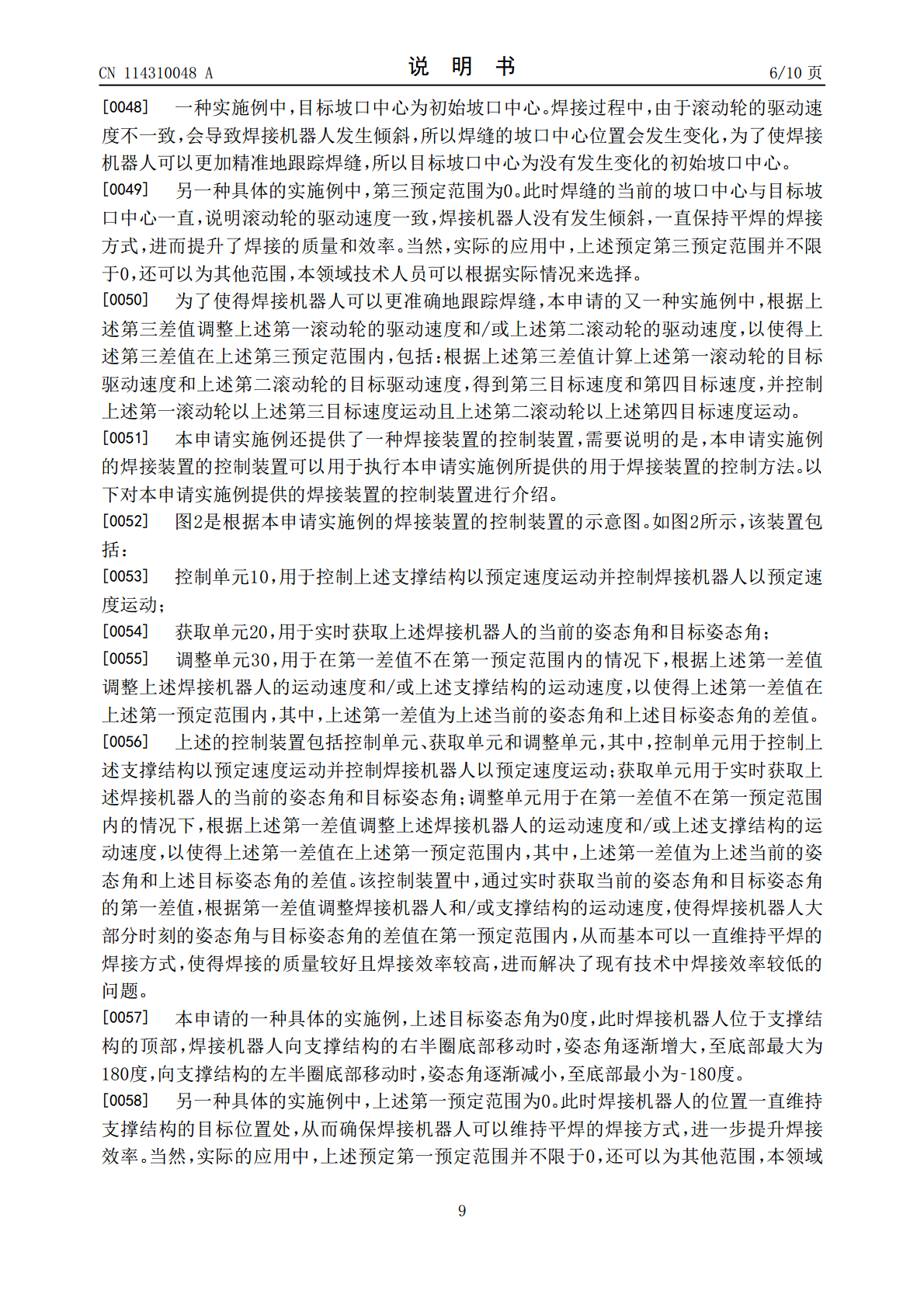
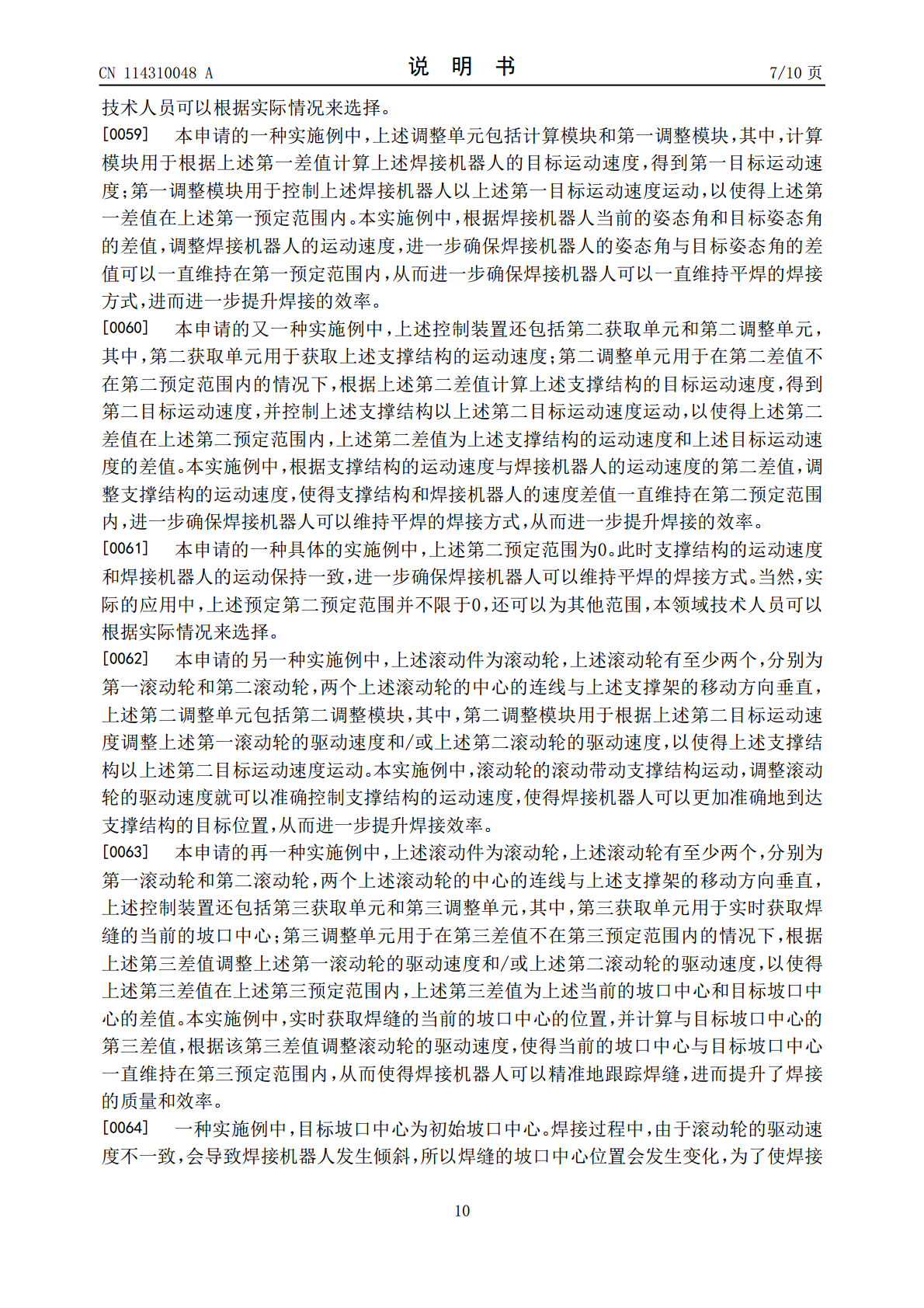
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
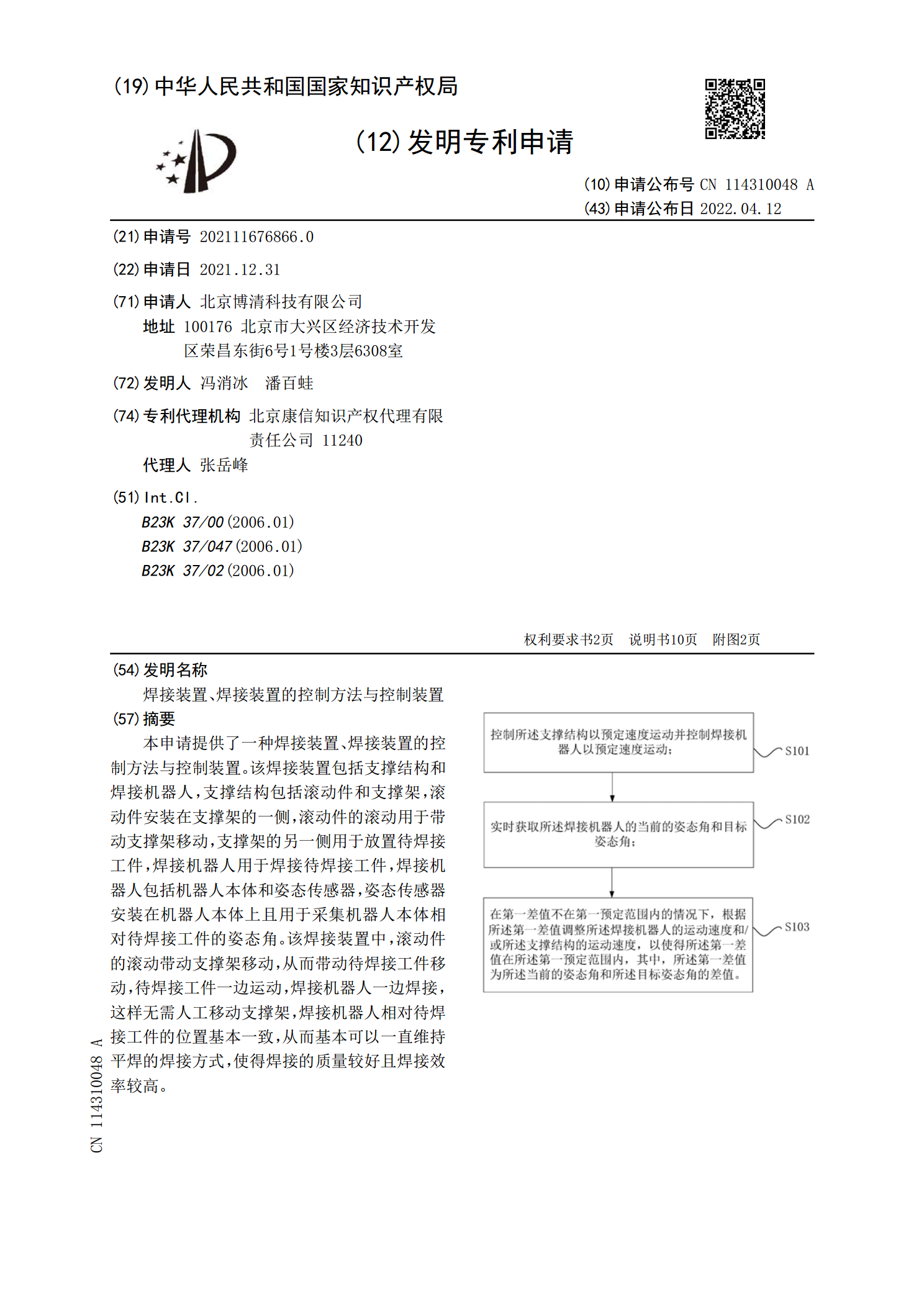
焊接装置、焊接装置的控制方法与控制装置.pdf
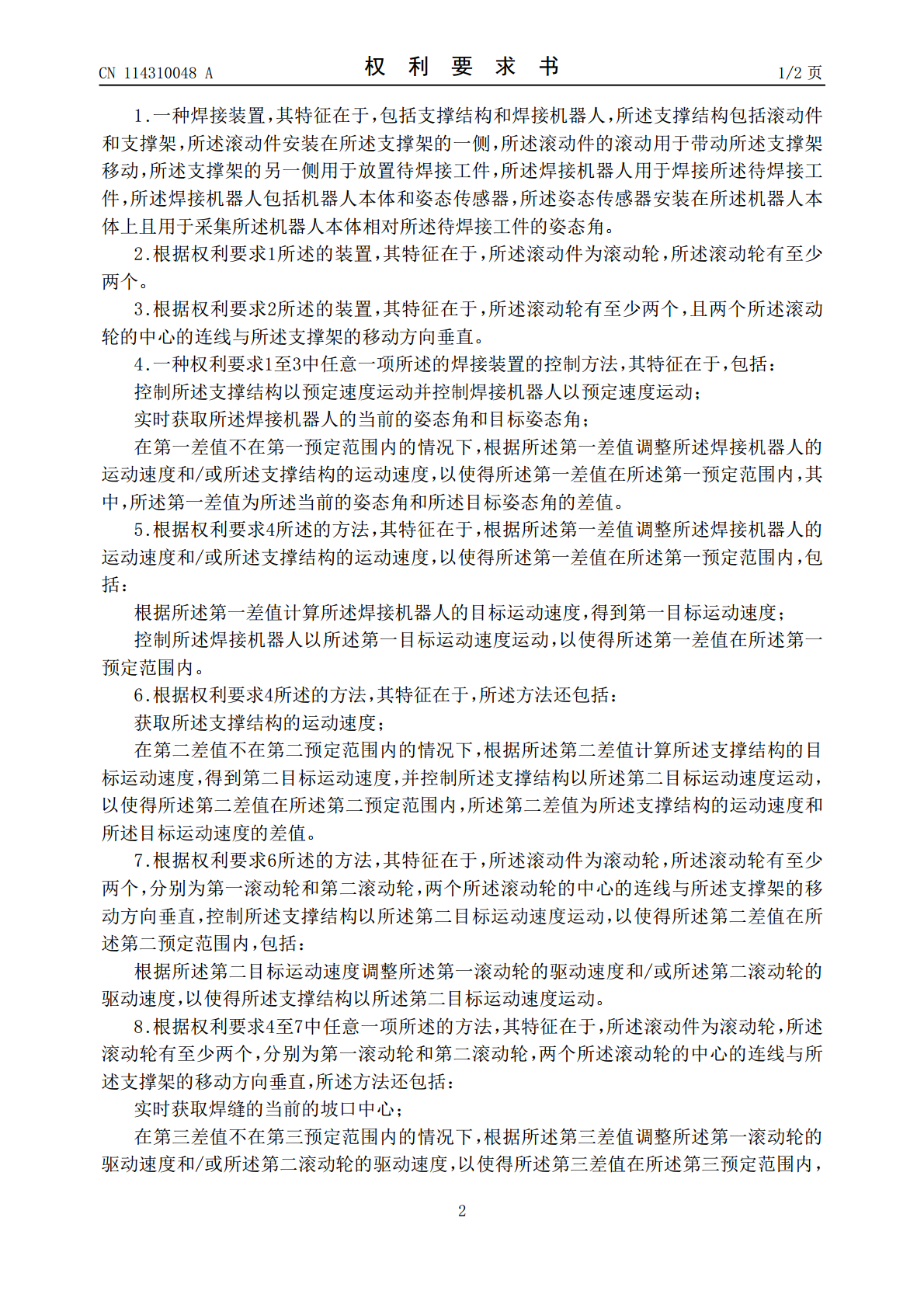
本申请提供了一种焊接装置、焊接装置的控制方法与控制装置。该焊接装置包括支撑结构和焊接机器人,支撑结构包括滚动件和支撑架,滚动件安装在支撑架的一侧,滚动件的滚动用于带动支撑架移动,支撑架的另一侧用于放置待焊接工件,焊接机器人用于焊接待焊接工件,焊接机器人包括机器人本体和姿态传感器,姿态传感器安装在机器人本体上且用于采集机器人本体相对待焊接工件的姿态角。该焊接装置中,滚动件的滚动带动支撑架移动,从而带动待焊接工件移动,待焊接工件一边运动,焊接机器人一边焊接,这样无需人工移动支撑架,焊接机器人相对待焊接工件的位

焊接的控制方法、控制装置和焊接系统.pdf
本申请提供了一种焊接的控制方法、控制装置和焊接系统。该方法包括:在焊接头盔的语音接收结构接收到语音指令的情况下,确定语音指令是否为目标指令;在语音指令不为目标指令的情况下,将语音指令对应的文字指令信息显示在焊接头盔的显示屏上;响应于作用在显示屏上的至少第一预定操作,生成更新指令信息;在更新指令信息对应的更新指令为目标指令的情况下,控制焊接机器人执行目标指令。该方法实现了通过语音控制焊接机器人,这样用户可以在电控柜控制焊接机器人不准确的情况下,通过语音辅助控制,使得焊接更加精准,同时还可以在用户的语音指令不

焊接角度控制装置.pdf
本发明涉及一种焊接角度控制装置,包括主轴和传动轴,特征是:在所述主轴上安装大同步带轮,传动轴上固定小同步带轮,大同步带轮和小同步带轮通过同步带连接;所述传动轴安装在轴承内圈中,轴承安装在固定板上的轴承孔中,并在轴承一端设置端盖,端盖与固定板固定,固定板固定在平板上;在所述平板上固定计数器安装板,在计数器安装板上安装旋转计数器,旋转计数器的出轴通过联轴器与传动轴连接。本发明所述的焊接角度控制装置能够精确控制焊接时工件的起弧角度、焊接角度、收弧角度,而且结构简单,安装方便,稳定性好。
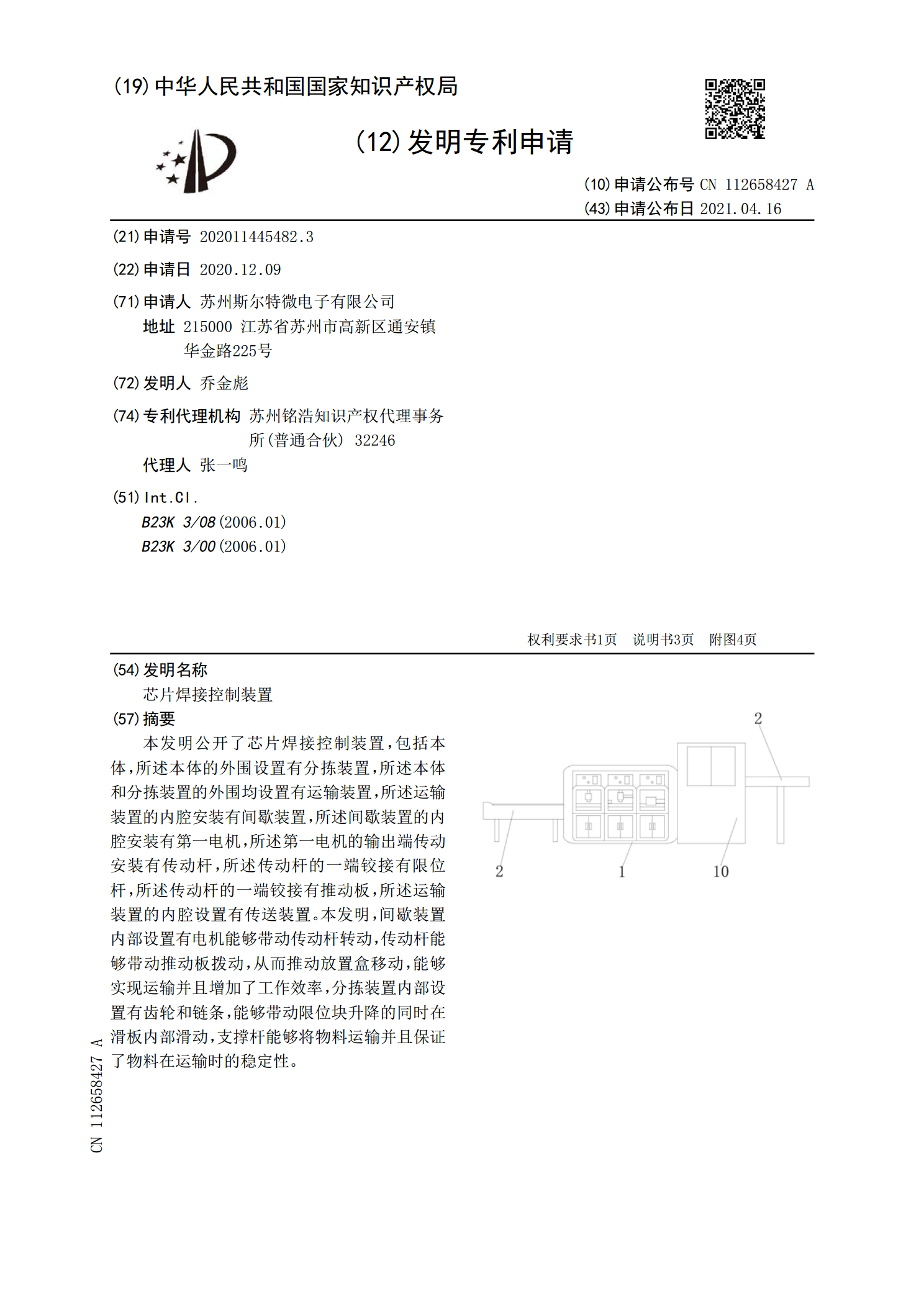
芯片焊接控制装置.pdf
本发明公开了芯片焊接控制装置,包括本体,所述本体的外围设置有分拣装置,所述本体和分拣装置的外围均设置有运输装置,所述运输装置的内腔安装有间歇装置,所述间歇装置的内腔安装有第一电机,所述第一电机的输出端传动安装有传动杆,所述传动杆的一端铰接有限位杆,所述传动杆的一端铰接有推动板,所述运输装置的内腔设置有传送装置。本发明,间歇装置内部设置有电机能够带动传动杆转动,传动杆能够带动推动板拨动,从而推动放置盒移动,能够实现运输并且增加了工作效率,分拣装置内部设置有齿轮和链条,能够带动限位块升降的同时在滑板内部滑动,

焊接控制方法、计算机可读存储介质和焊接控制装置.pdf
本发明提供了一种焊接控制方法、计算机可读存储介质和焊接控制装置,所述焊接控制方法包括:启动横摆机构以带动焊枪摆动,并控制焊接电源输出脉冲电流;获取横摆机构的移动位置,在所述横摆机构移动至焊缝中心时,控制所述横摆机构在焊缝中心停留第一预设时长,并且在该第一预设时长内,控制焊接电源输出第一预设恒定电流;在所述第一预设时长后,控制脉冲电源按照预设的脉冲电流参数继续输出脉冲电流。采用上述方案,通过控制横摆机构在焊缝中心停留并将脉冲电流锁定在稳定状态,便于焊丝稳定地融化并填充在焊缝中,使焊接过程得到精准地控制,有效