
焊接系统及焊接控制方法.pdf

猫巷****志敏

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共33页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

焊接系统及焊接控制方法.pdf
本发明属于焊接技术领域,具体公开了一种焊接系统及焊接控制方法,其用于将第一管件焊接于结构件,结构件形成有坡口,焊接系统包括焊接机器人、测量装置和控制装置,待所述第一管件和所述结构件预定位后,用于测量所述第一管件的第一位置信息及所述坡口的第一轮廓;控制装置被配置为能够根据所述第一位置信息及所述第一轮廓建立坡口模型,并计算得到所述第一管件的实际同轴度数据,根据所述坡口模型以及所述实际同轴度数据,并结合目标同轴度数据分析确定第一焊接工艺;并被配置为能根据坡口模型与目标同轴度分析确定第一焊接工艺,以使得焊接机器人

焊接的控制方法、控制装置和焊接系统.pdf
本申请提供了一种焊接的控制方法、控制装置和焊接系统。该方法包括:在焊接头盔的语音接收结构接收到语音指令的情况下,确定语音指令是否为目标指令;在语音指令不为目标指令的情况下,将语音指令对应的文字指令信息显示在焊接头盔的显示屏上;响应于作用在显示屏上的至少第一预定操作,生成更新指令信息;在更新指令信息对应的更新指令为目标指令的情况下,控制焊接机器人执行目标指令。该方法实现了通过语音控制焊接机器人,这样用户可以在电控柜控制焊接机器人不准确的情况下,通过语音辅助控制,使得焊接更加精准,同时还可以在用户的语音指令不
SMD器件焊接控制系统及焊接控制方法.pdf
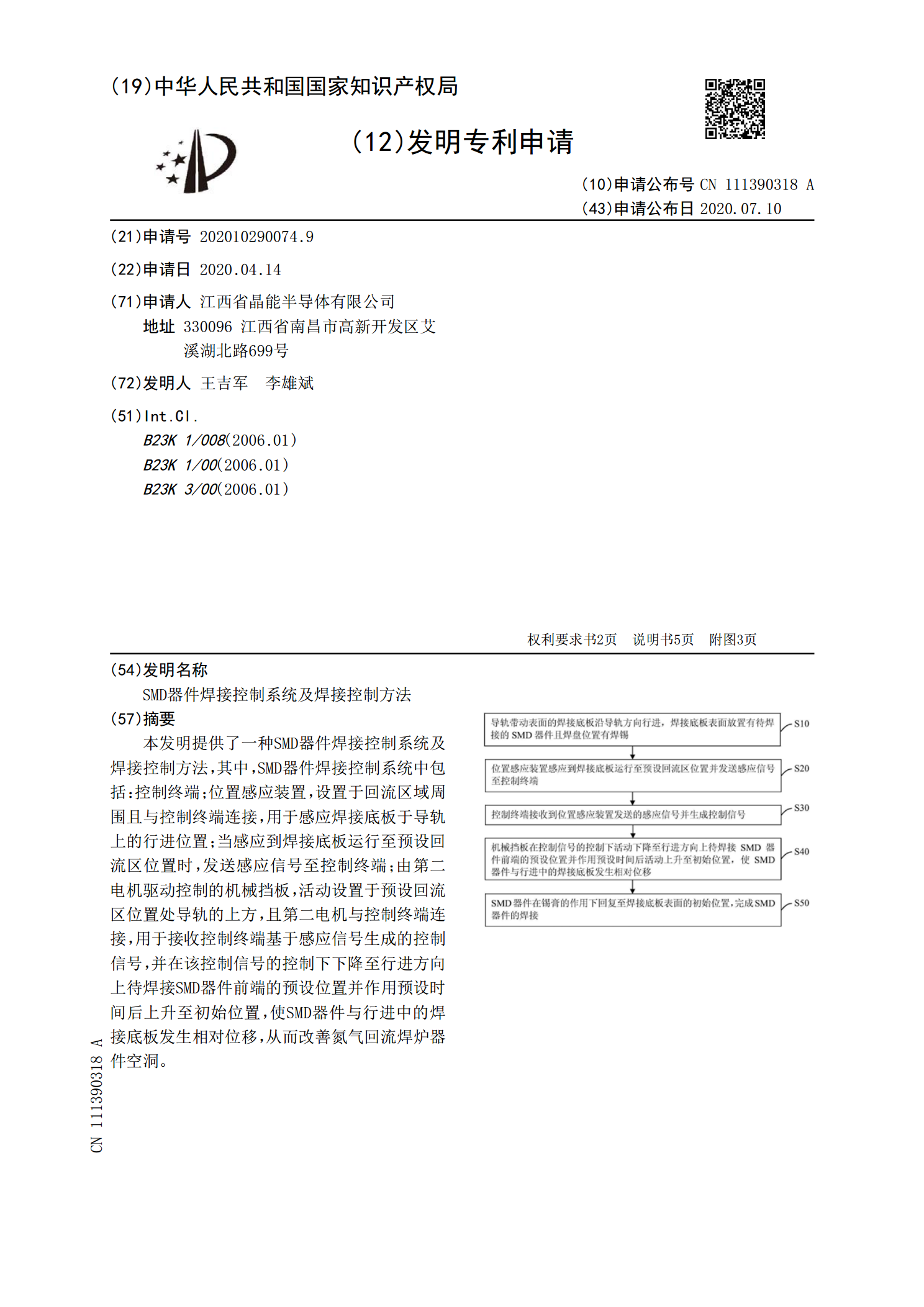
本发明提供了一种SMD器件焊接控制系统及焊接控制方法,其中,SMD器件焊接控制系统中包括:控制终端;位置感应装置,设置于回流区域周围且与控制终端连接,用于感应焊接底板于导轨上的行进位置;当感应到焊接底板运行至预设回流区位置时,发送感应信号至控制终端;由第二电机驱动控制的机械挡板,活动设置于预设回流区位置处导轨的上方,且第二电机与控制终端连接,用于接收控制终端基于感应信号生成的控制信号,并在该控制信号的控制下下降至行进方向上待焊接SMD器件前端的预设位置并作用预设时间后上升至初始位置,使SMD器件与行进中的

一种焊接控制方法及焊接系统.pdf
本发明实施例公开了一种焊接控制方法及焊接系统。该焊接控制方法包括:检测焊机的运行状态;若焊机处于焊接状态且运行于能量模式,则获取对于焊机的第一功率采样信号;获取计时器的计数值,并在获取到计数值后清零计时器,以控制计时器重新计时,其中,计数值作为焊机在上一焊接阶段的焊接时长;获取对于焊机的第二功率采样信号;基于第一功率采样信号、第二功率采样信号和焊接时长,确定焊机在上一焊接阶段产生的能量增量;基于能量增量控制焊机的运行状态。控制器能够根据所获取到的参数自动计算焊接过程中的累计焊接能量,而不存在停留等待的过程
一种焊接控制方法及焊接系统.pdf
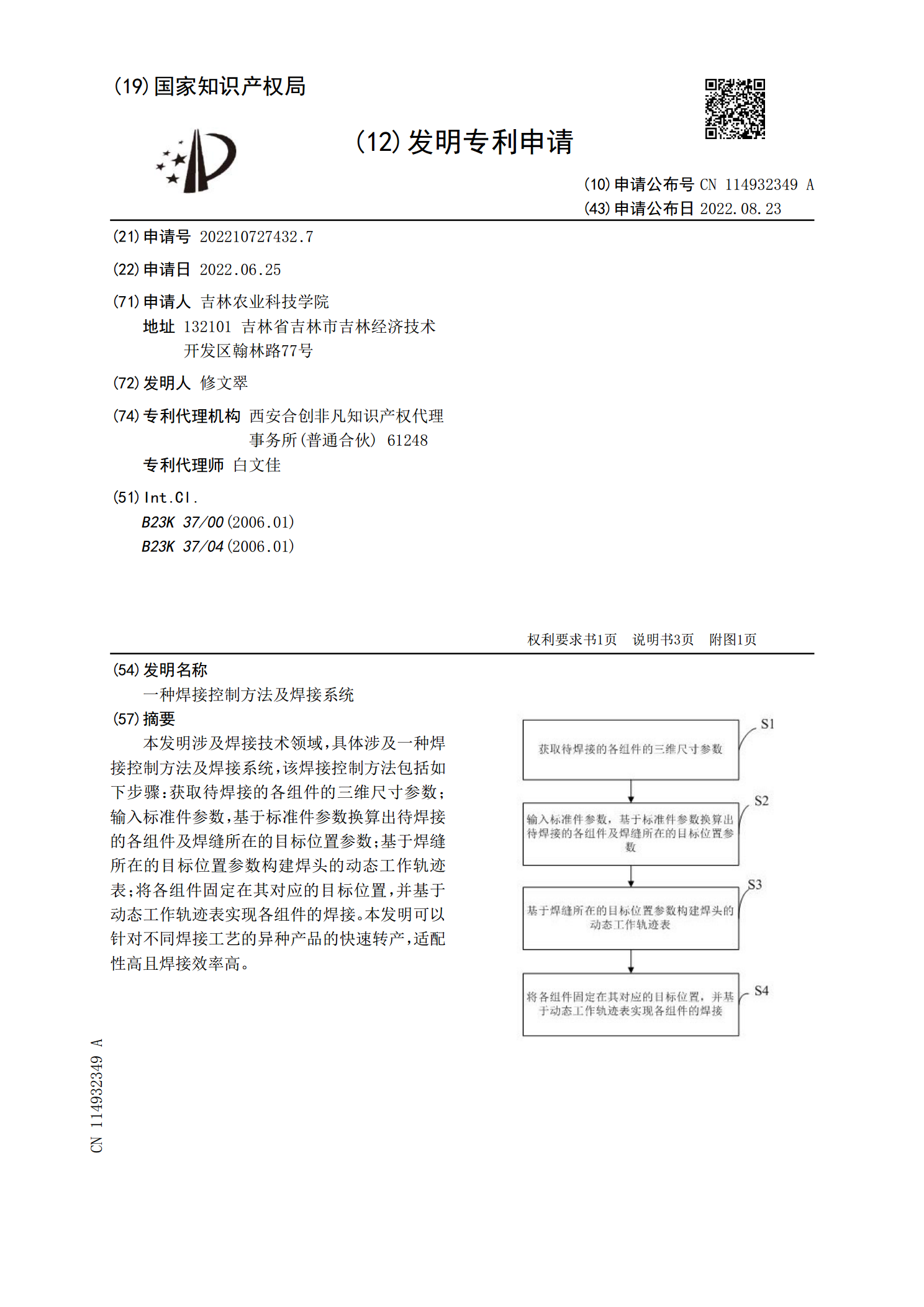
本发明涉及焊接技术领域,具体涉及一种焊接控制方法及焊接系统,该焊接控制方法包括如下步骤:获取待焊接的各组件的三维尺寸参数;输入标准件参数,基于标准件参数换算出待焊接的各组件及焊缝所在的目标位置参数;基于焊缝所在的目标位置参数构建焊头的动态工作轨迹表;将各组件固定在其对应的目标位置,并基于动态工作轨迹表实现各组件的焊接。本发明可以针对不同焊接工艺的异种产品的快速转产,适配性高且焊接效率高。