
一种无人艇水面目标融合检测方法及系统.pdf

一吃****春艳

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人艇水面目标融合检测方法及系统.pdf
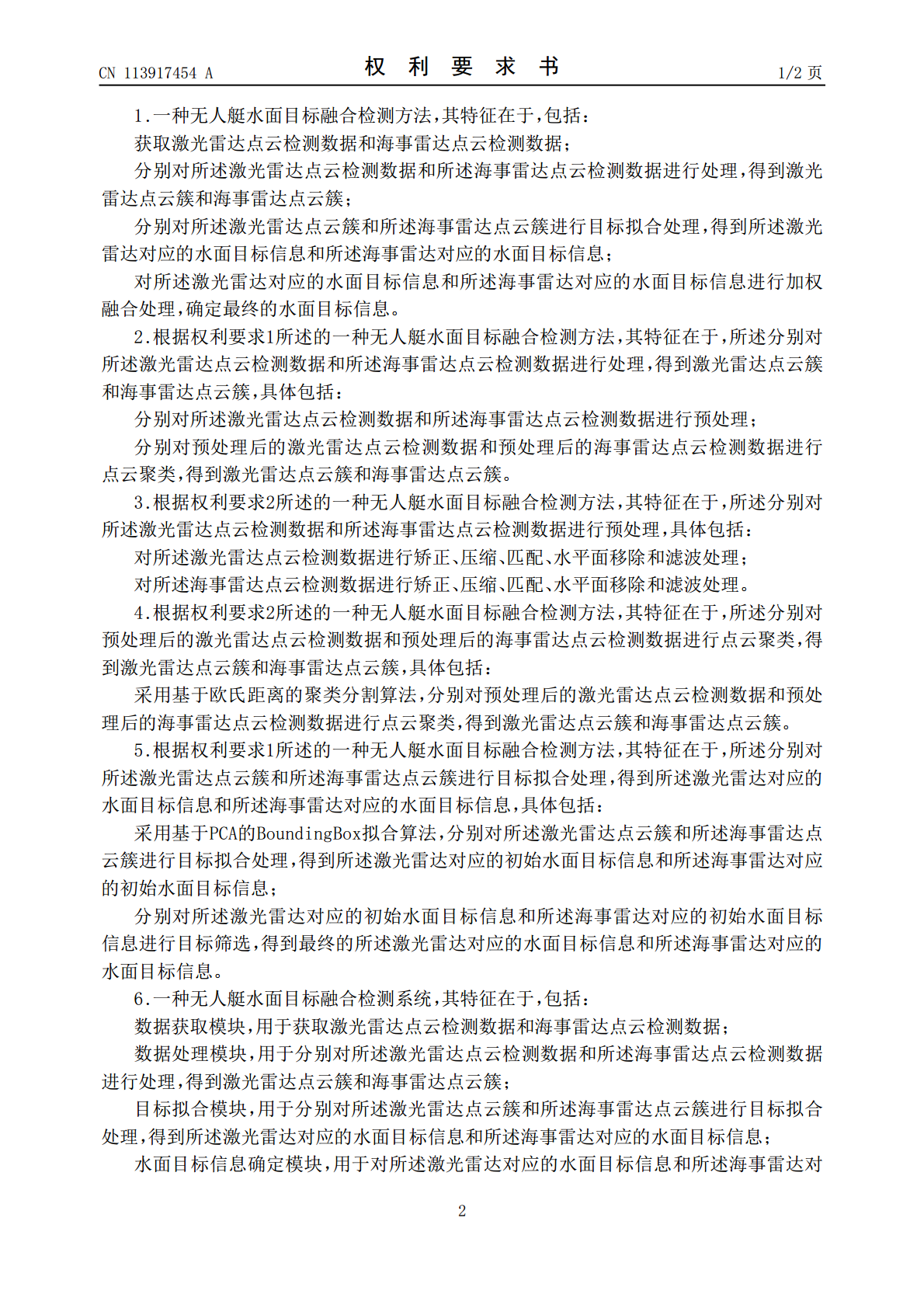
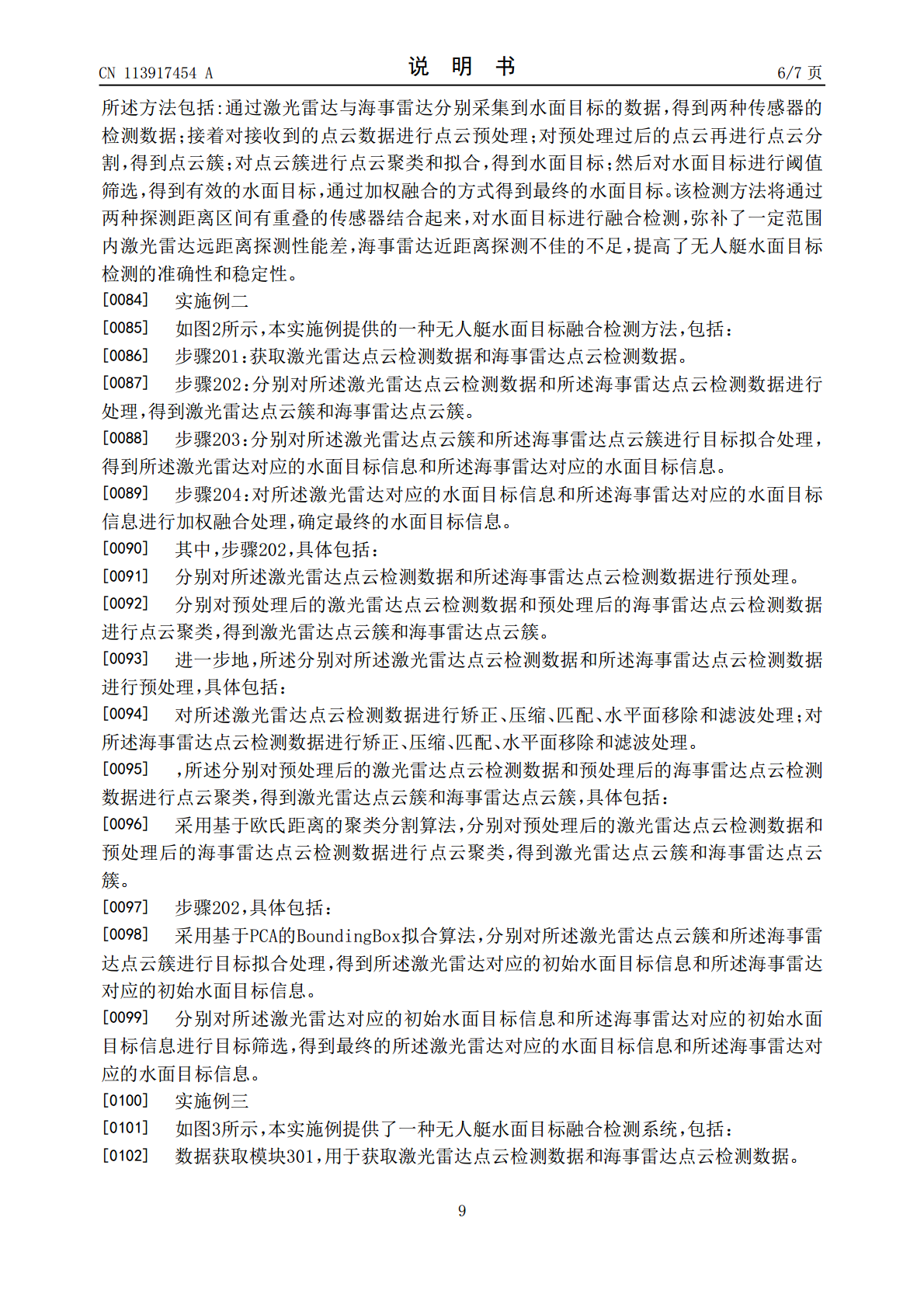
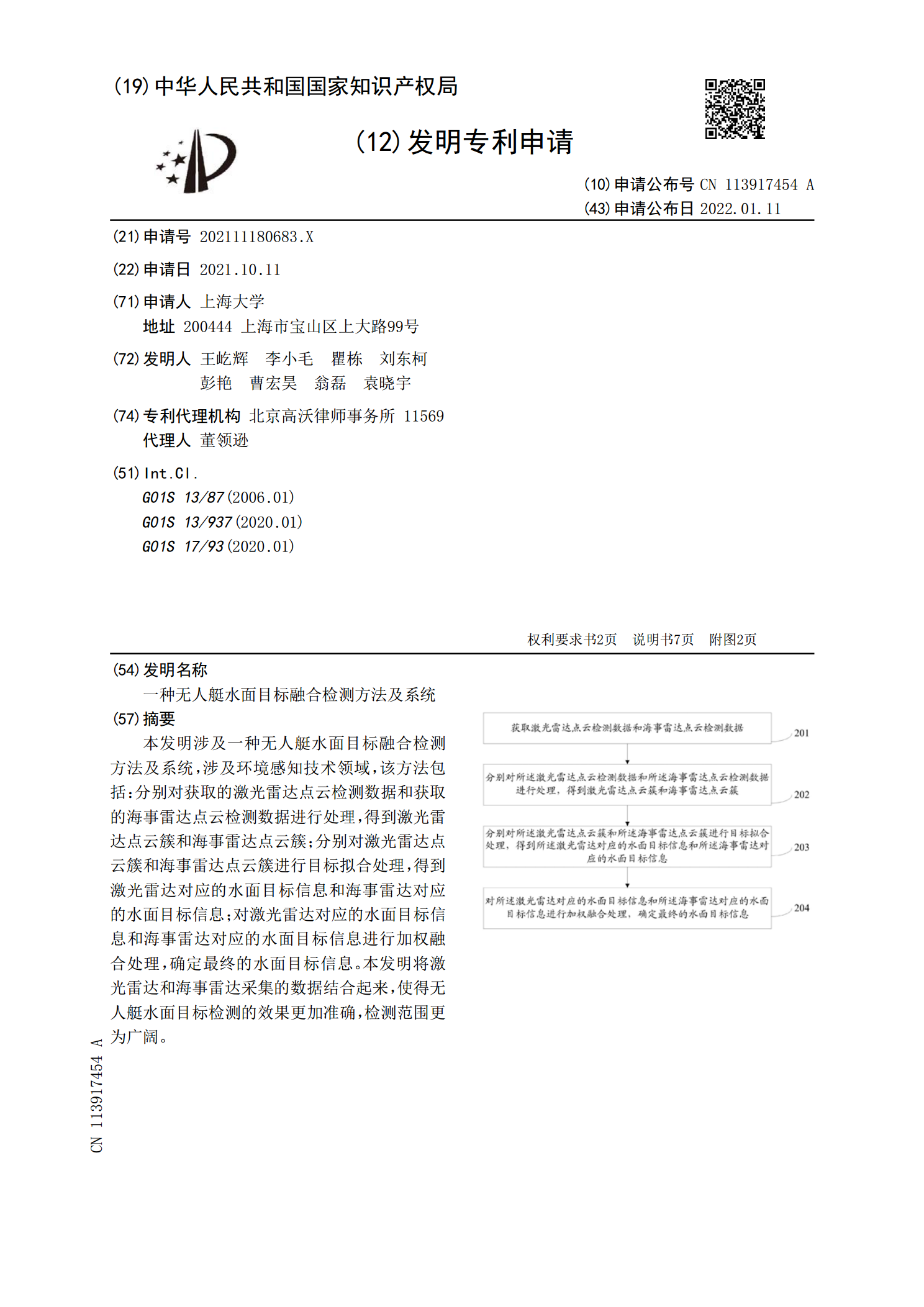
本发明涉及一种无人艇水面目标融合检测方法及系统,涉及环境感知技术领域,该方法包括:分别对获取的激光雷达点云检测数据和获取的海事雷达点云检测数据进行处理,得到激光雷达点云簇和海事雷达点云簇;分别对激光雷达点云簇和海事雷达点云簇进行目标拟合处理,得到激光雷达对应的水面目标信息和海事雷达对应的水面目标信息;对激光雷达对应的水面目标信息和海事雷达对应的水面目标信息进行加权融合处理,确定最终的水面目标信息。本发明将激光雷达和海事雷达采集的数据结合起来,使得无人艇水面目标检测的效果更加准确,检测范围更为广阔。

一种基于区域建议网络的无人艇水面目标检测方法.pdf
本发明公开了一种基于区域建议网络的无人艇水面目标检测方法,应用更快速‑区域神经网络和区域建议网络在线进行水面目标检测,基于特征融合原理,在使用区域建议网络的基础上,修改了锚点的生成机制,提出一种使用特征融合方法构造新的特征层,并将锚点分线路在不同特征图上生成的区域建议方法,同时根据特征图大小采用间隔采样策略减少计算量。方法的优点在于最大程度上保留了潜在目标,每个区域建议都有对应的分类结果而不会被有重叠区域的其他区域兼并,以增加一定计算量为代价提升目标物体的召回率,一定程度上降低其漏检概率。
一种水面无人艇航向控制系统及方法.pdf
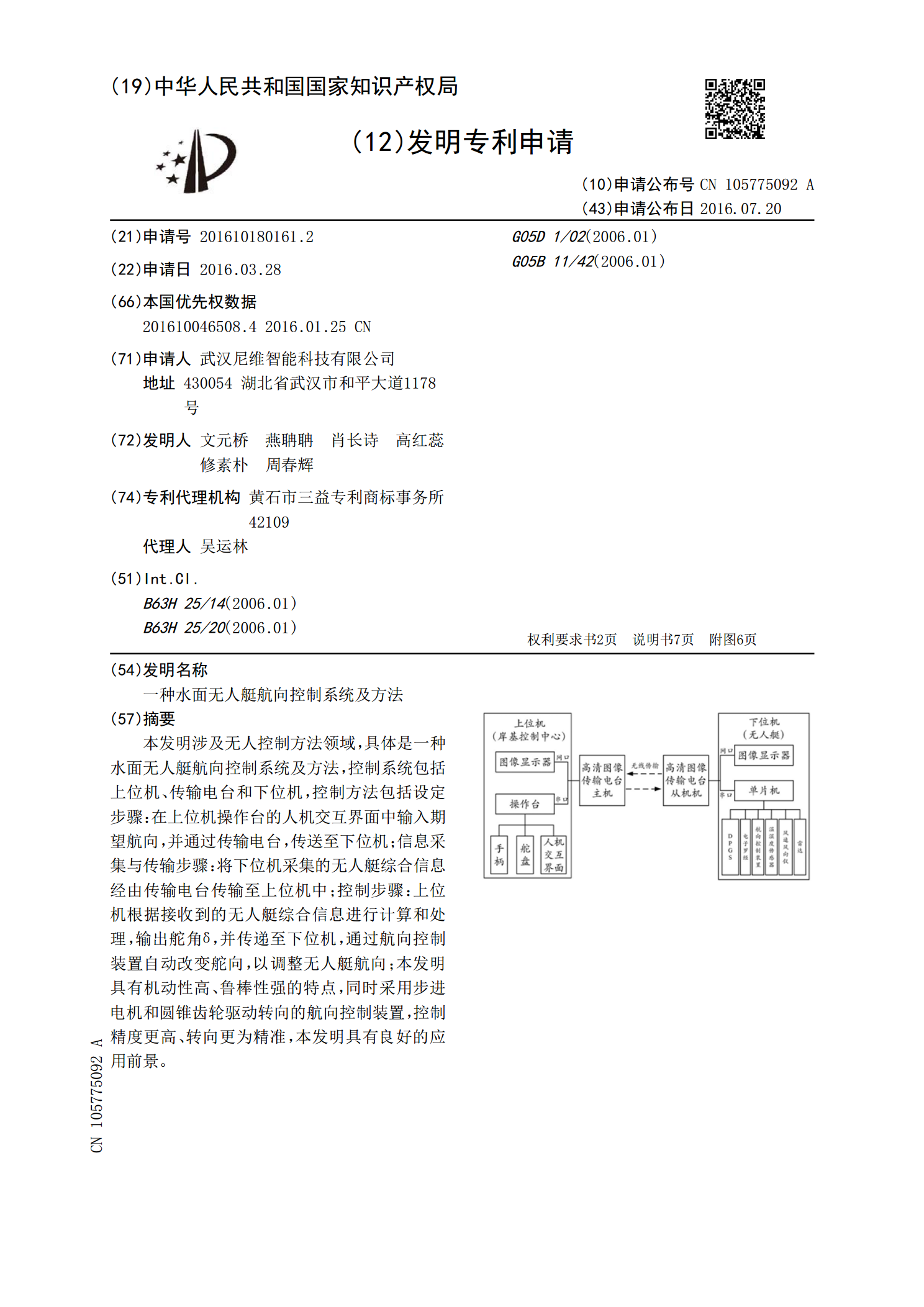
本发明涉及无人控制方法领域,具体是一种水面无人艇航向控制系统及方法,控制系统包括上位机、传输电台和下位机,控制方法包括设定步骤:在上位机操作台的人机交互界面中输入期望航向,并通过传输电台,传送至下位机;信息采集与传输步骤:将下位机采集的无人艇综合信息经由传输电台传输至上位机中;控制步骤:上位机根据接收到的无人艇综合信息进行计算和处理,输出舵角δ,并传递至下位机,通过航向控制装置自动改变舵向,以调整无人艇航向;本发明具有机动性高、鲁棒性强的特点,同时采用步进电机和圆锥齿轮驱动转向的航向控制装置,控制精度更高
一种无人水面艇收放无人潜航器装置.pdf
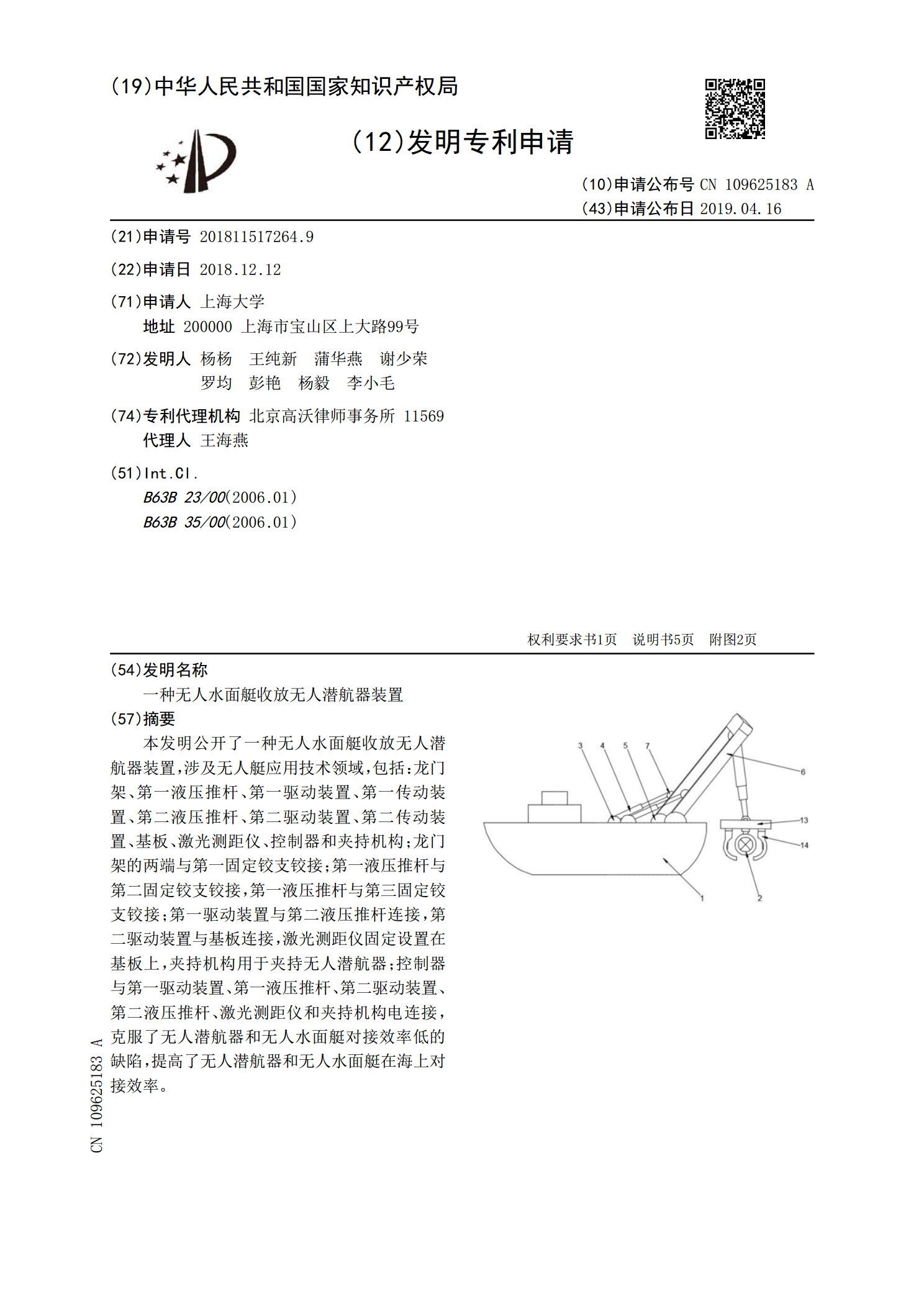
本发明公开了一种无人水面艇收放无人潜航器装置,涉及无人艇应用技术领域,包括:龙门架、第一液压推杆、第一驱动装置、第一传动装置、第二液压推杆、第二驱动装置、第二传动装置、基板、激光测距仪、控制器和夹持机构;龙门架的两端与第一固定铰支铰接;第一液压推杆与第二固定铰支铰接,第一液压推杆与第三固定铰支铰接;第一驱动装置与第二液压推杆连接,第二驱动装置与基板连接,激光测距仪固定设置在基板上,夹持机构用于夹持无人潜航器;控制器与第一驱动装置、第一液压推杆、第二驱动装置、第二液压推杆、激光测距仪和夹持机构电连接,克服了

一种轻量化的无人艇目标检测方法.pdf
本发明提供了一种轻量化的无人艇海面目标检测方法,通过使用Mosaic图像扩增,丰富了图像的背景信息并增加了小尺度目标的数量,提高了海面小目标的检测精度。通过使用轻量化的网络ShuffleNetv2作为YOLOv5网络结构中的特征提取网络,使用深度可分离卷积代替YOLOv5中的Bottleneck模块,显著降低了模型的参数量,大幅度提高了在嵌入式设备上的检测速度。相对于原本的YOLOv5网络,具有更快的处理速度,充分满足无人艇在检测海面目标时对于实时性的要求。本发明解决现有的目标检测算法无法在算力有限的嵌入