
一种基于区域建议网络的无人艇水面目标检测方法.pdf

葫芦****io


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于区域建议网络的无人艇水面目标检测方法.pdf
本发明公开了一种基于区域建议网络的无人艇水面目标检测方法,应用更快速‑区域神经网络和区域建议网络在线进行水面目标检测,基于特征融合原理,在使用区域建议网络的基础上,修改了锚点的生成机制,提出一种使用特征融合方法构造新的特征层,并将锚点分线路在不同特征图上生成的区域建议方法,同时根据特征图大小采用间隔采样策略减少计算量。方法的优点在于最大程度上保留了潜在目标,每个区域建议都有对应的分类结果而不会被有重叠区域的其他区域兼并,以增加一定计算量为代价提升目标物体的召回率,一定程度上降低其漏检概率。
一种无人艇水面目标融合检测方法及系统.pdf
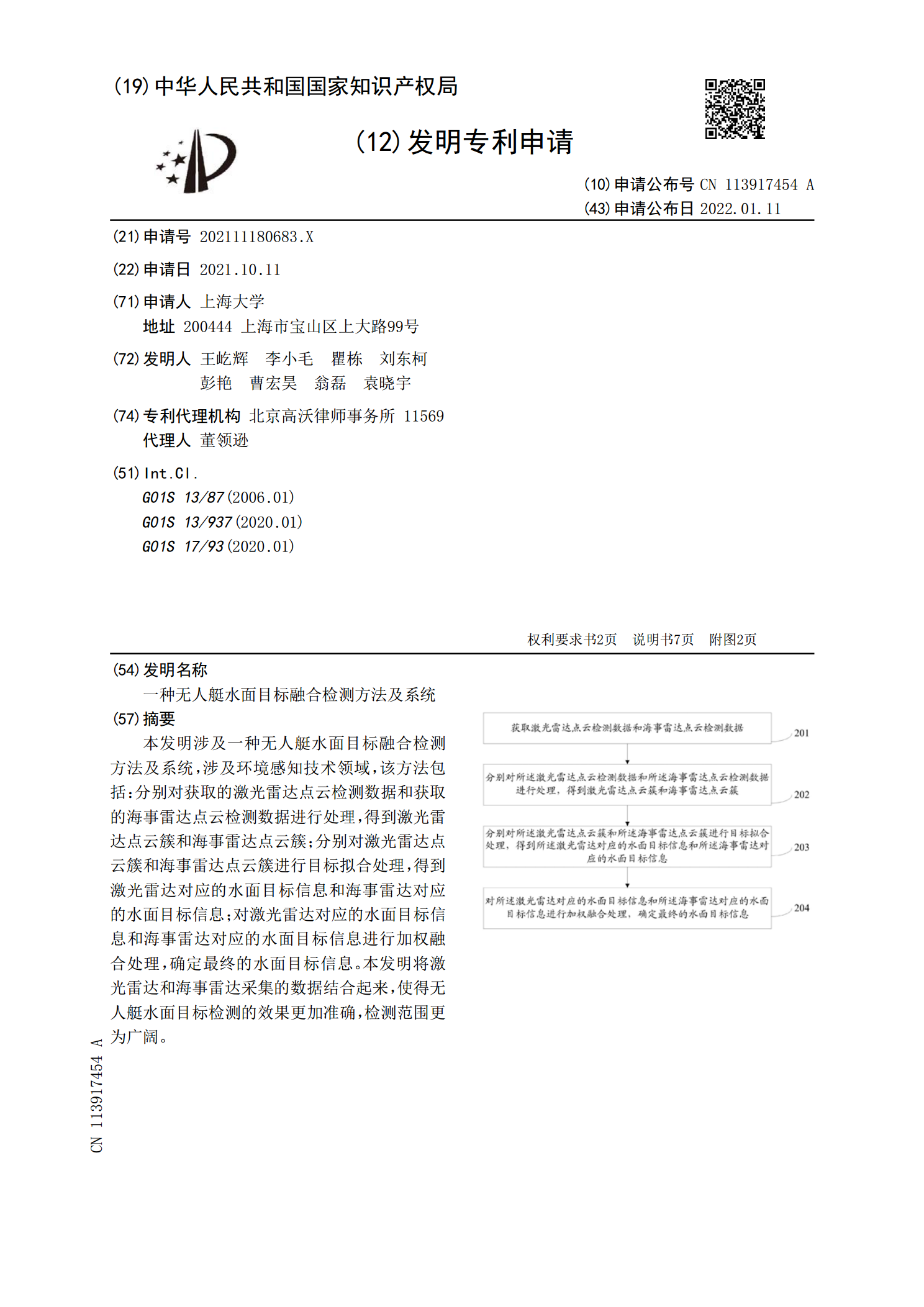
本发明涉及一种无人艇水面目标融合检测方法及系统,涉及环境感知技术领域,该方法包括:分别对获取的激光雷达点云检测数据和获取的海事雷达点云检测数据进行处理,得到激光雷达点云簇和海事雷达点云簇;分别对激光雷达点云簇和海事雷达点云簇进行目标拟合处理,得到激光雷达对应的水面目标信息和海事雷达对应的水面目标信息;对激光雷达对应的水面目标信息和海事雷达对应的水面目标信息进行加权融合处理,确定最终的水面目标信息。本发明将激光雷达和海事雷达采集的数据结合起来,使得无人艇水面目标检测的效果更加准确,检测范围更为广阔。
基于深度强化学习的水面无人艇路径跟踪方法.pdf
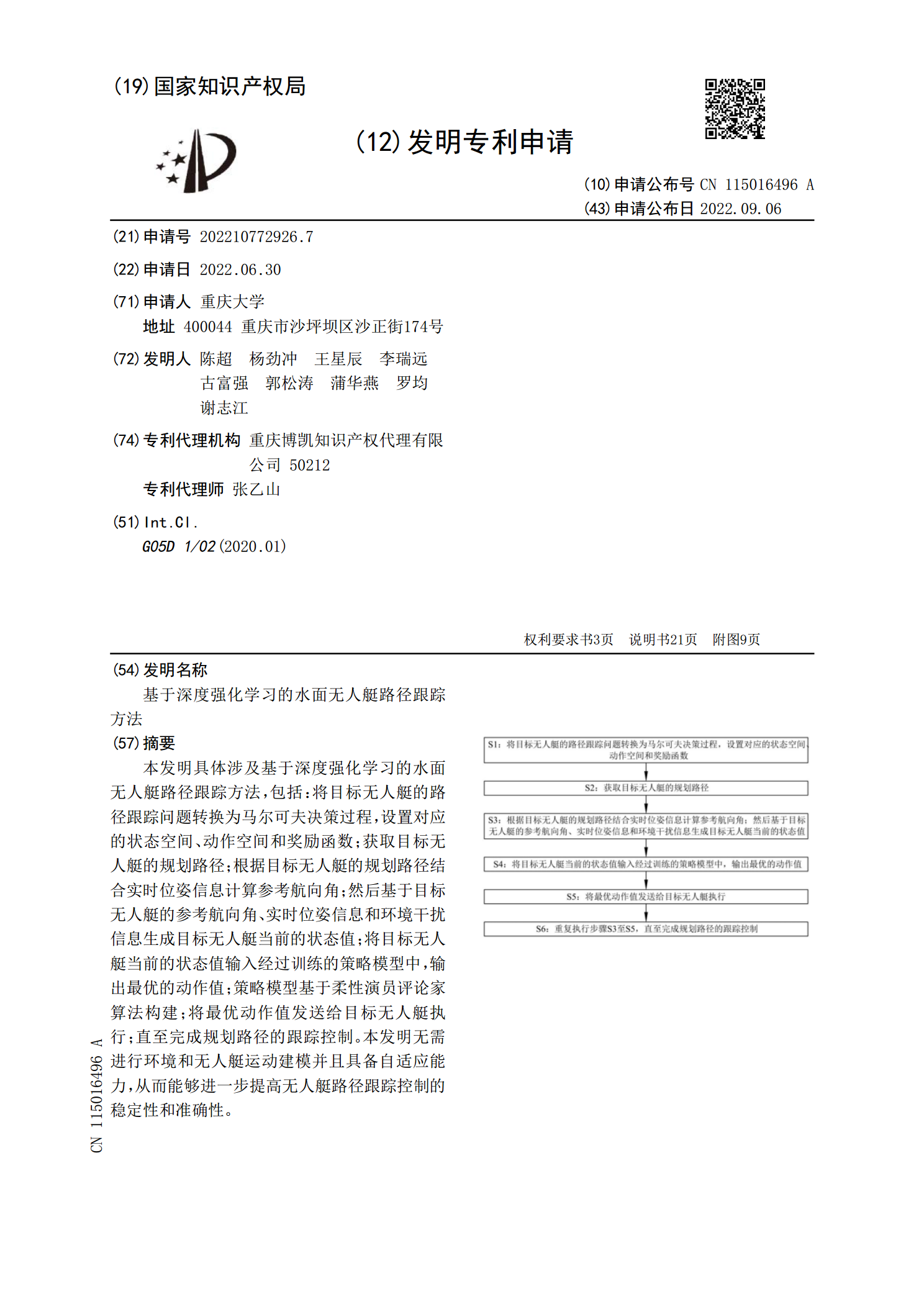
本发明具体涉及基于深度强化学习的水面无人艇路径跟踪方法,包括:将目标无人艇的路径跟踪问题转换为马尔可夫决策过程,设置对应的状态空间、动作空间和奖励函数;获取目标无人艇的规划路径;根据目标无人艇的规划路径结合实时位姿信息计算参考航向角;然后基于目标无人艇的参考航向角、实时位姿信息和环境干扰信息生成目标无人艇当前的状态值;将目标无人艇当前的状态值输入经过训练的策略模型中,输出最优的动作值;策略模型基于柔性演员评论家算法构建;将最优动作值发送给目标无人艇执行;直至完成规划路径的跟踪控制。本发明无需进行环境和无人
一种无人水面艇收放无人潜航器装置.pdf
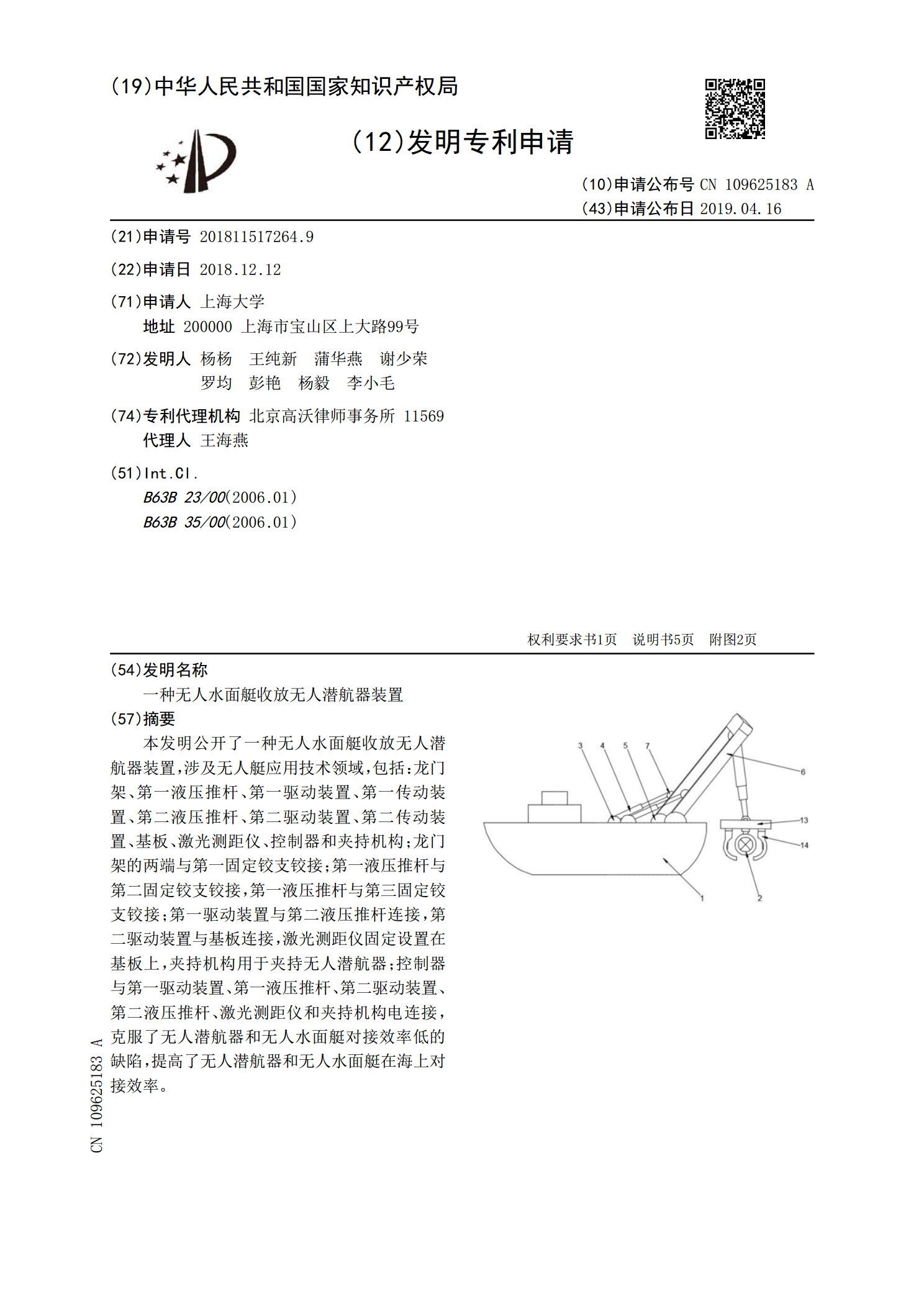
本发明公开了一种无人水面艇收放无人潜航器装置,涉及无人艇应用技术领域,包括:龙门架、第一液压推杆、第一驱动装置、第一传动装置、第二液压推杆、第二驱动装置、第二传动装置、基板、激光测距仪、控制器和夹持机构;龙门架的两端与第一固定铰支铰接;第一液压推杆与第二固定铰支铰接,第一液压推杆与第三固定铰支铰接;第一驱动装置与第二液压推杆连接,第二驱动装置与基板连接,激光测距仪固定设置在基板上,夹持机构用于夹持无人潜航器;控制器与第一驱动装置、第一液压推杆、第二驱动装置、第二液压推杆、激光测距仪和夹持机构电连接,克服了
一种基于比例导引的无人艇目标跟踪方法及系统.pdf
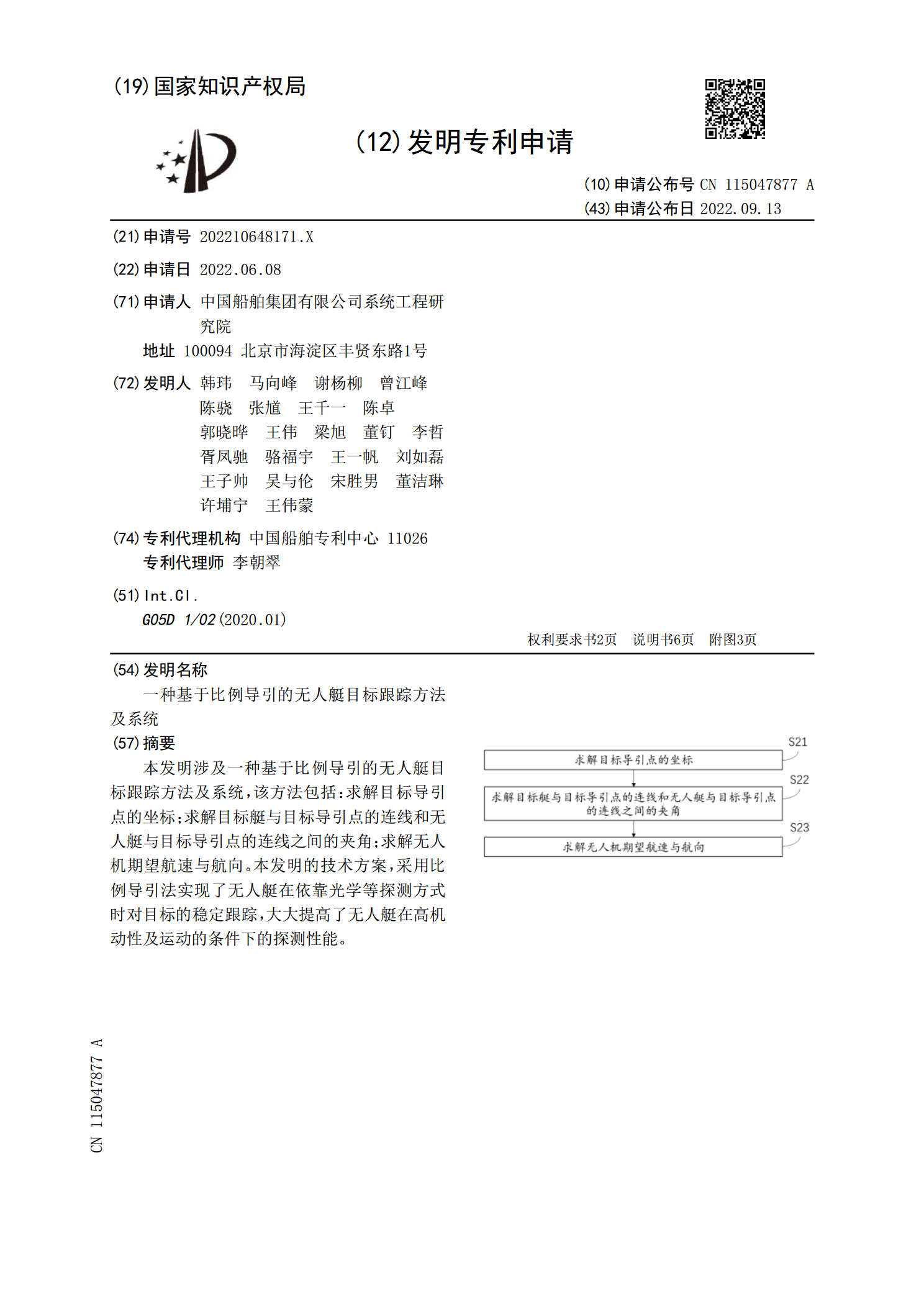
本发明涉及一种基于比例导引的无人艇目标跟踪方法及系统,该方法包括:求解目标导引点的坐标;求解目标艇与目标导引点的连线和无人艇与目标导引点的连线之间的夹角;求解无人机期望航速与航向。本发明的技术方案,采用比例导引法实现了无人艇在依靠光学等探测方式时对目标的稳定跟踪,大大提高了无人艇在高机动性及运动的条件下的探测性能。