
基于机器视觉的导航方法、装置、电子设备及存储介质.pdf

篷璐****爱吗

1/10
2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于机器视觉的导航方法、装置、电子设备及存储介质.pdf
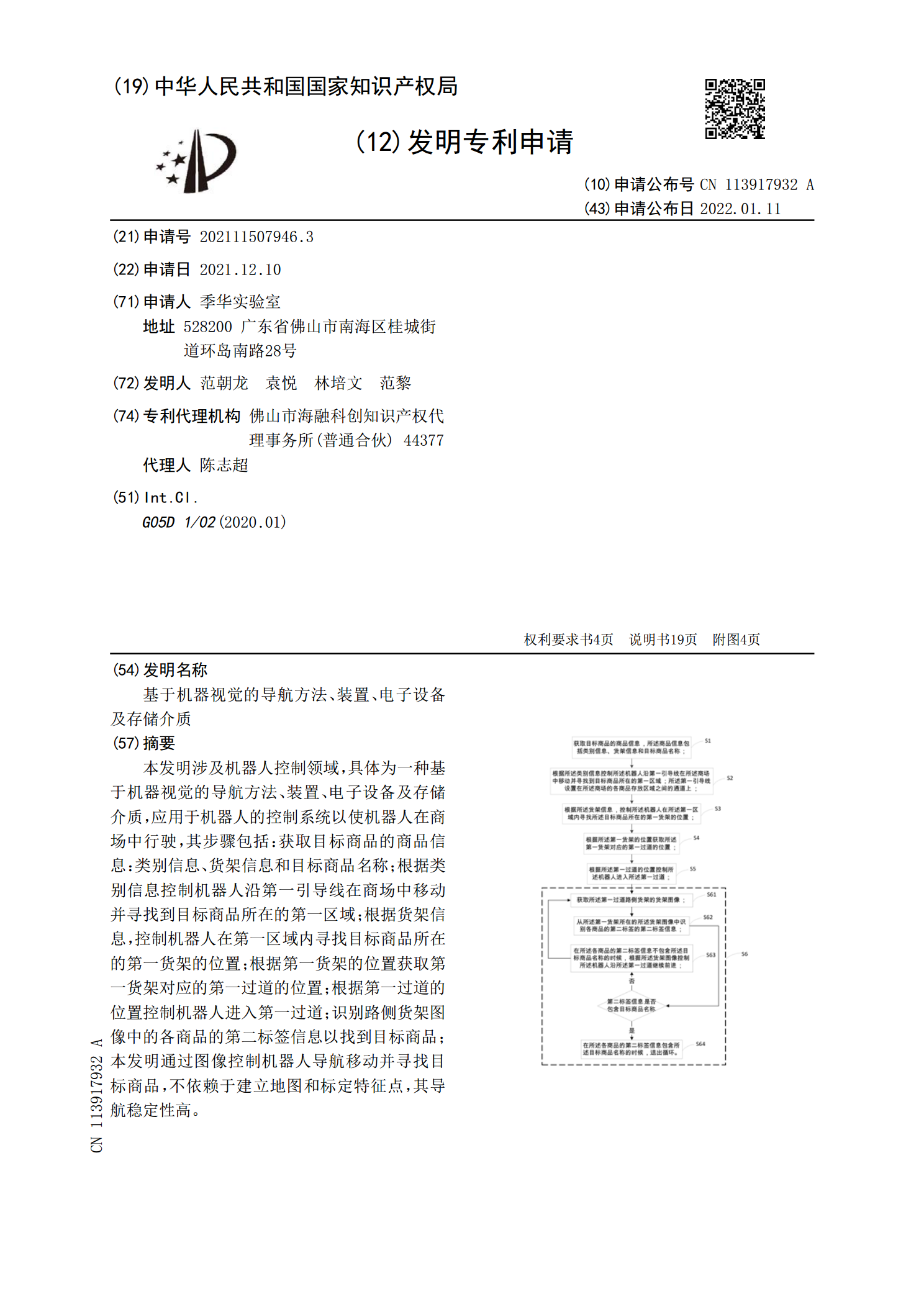
本发明涉及机器人控制领域,具体为一种基于机器视觉的导航方法、装置、电子设备及存储介质,应用于机器人的控制系统以使机器人在商场中行驶,其步骤包括:获取目标商品的商品信息:类别信息、货架信息和目标商品名称;根据类别信息控制机器人沿第一引导线在商场中移动并寻找到目标商品所在的第一区域;根据货架信息,控制机器人在第一区域内寻找目标商品所在的第一货架的位置;根据第一货架的位置获取第一货架对应的第一过道的位置;根据第一过道的位置控制机器人进入第一过道;识别路侧货架图像中的各商品的第二标签信息以找到目标商品;本发明通过
基于机器视觉的测试方法、装置及电子设备和存储介质.pdf
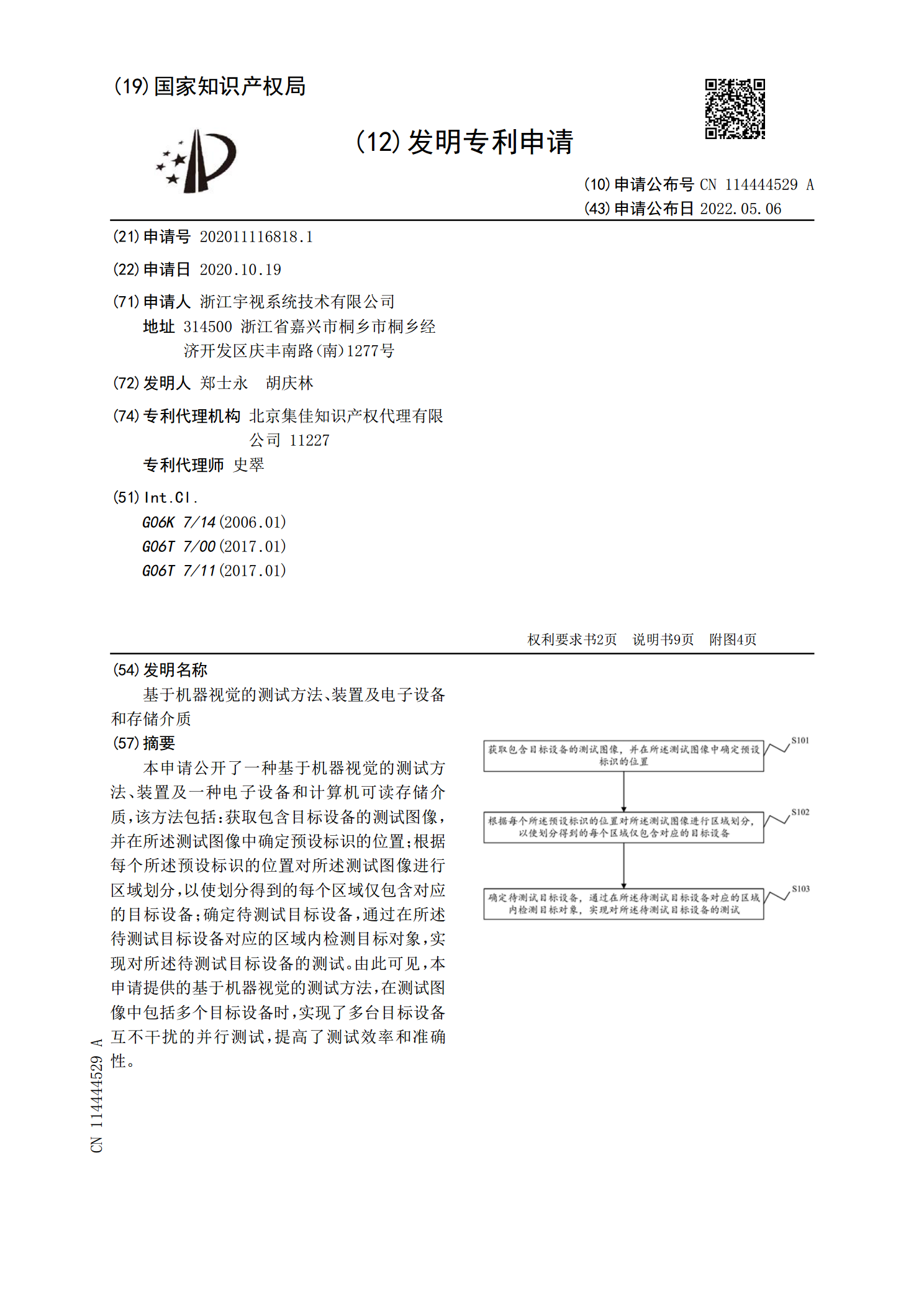
本申请公开了一种基于机器视觉的测试方法、装置及一种电子设备和计算机可读存储介质,该方法包括:获取包含目标设备的测试图像,并在所述测试图像中确定预设标识的位置;根据每个所述预设标识的位置对所述测试图像进行区域划分,以使划分得到的每个区域仅包含对应的目标设备;确定待测试目标设备,通过在所述待测试目标设备对应的区域内检测目标对象,实现对所述待测试目标设备的测试。由此可见,本申请提供的基于机器视觉的测试方法,在测试图像中包括多个目标设备时,实现了多台目标设备互不干扰的并行测试,提高了测试效率和准确性。

机器人导航的方法、装置、电子设备及存储介质.pdf
本发明公开了机器人导航的方法、装置、电子设备及存储介质,包括:获取预设时间段内行人的运动信息以及潜在目标点的位置信息;根据行人的运动信息以及潜在目标点的位置信息判断行人是否具有前往潜在目标点的行为意图;若有,则在行人和潜在目标点之间建立第一代价地图,否则在行人周围建立第二代价地图;根据第一代价地图或第二代价地图对机器人进行导航。本发明通过对行人的行为意图进行判断,并根据判断结果建立相应的代价地图,使机器人基于该代价地图进行路径规划,实现了机器人在执行导航任务的过程中对人类行为意图的判断,减少了机器人导航对
机器人导航控制方法、装置、电子设备及存储介质.pdf
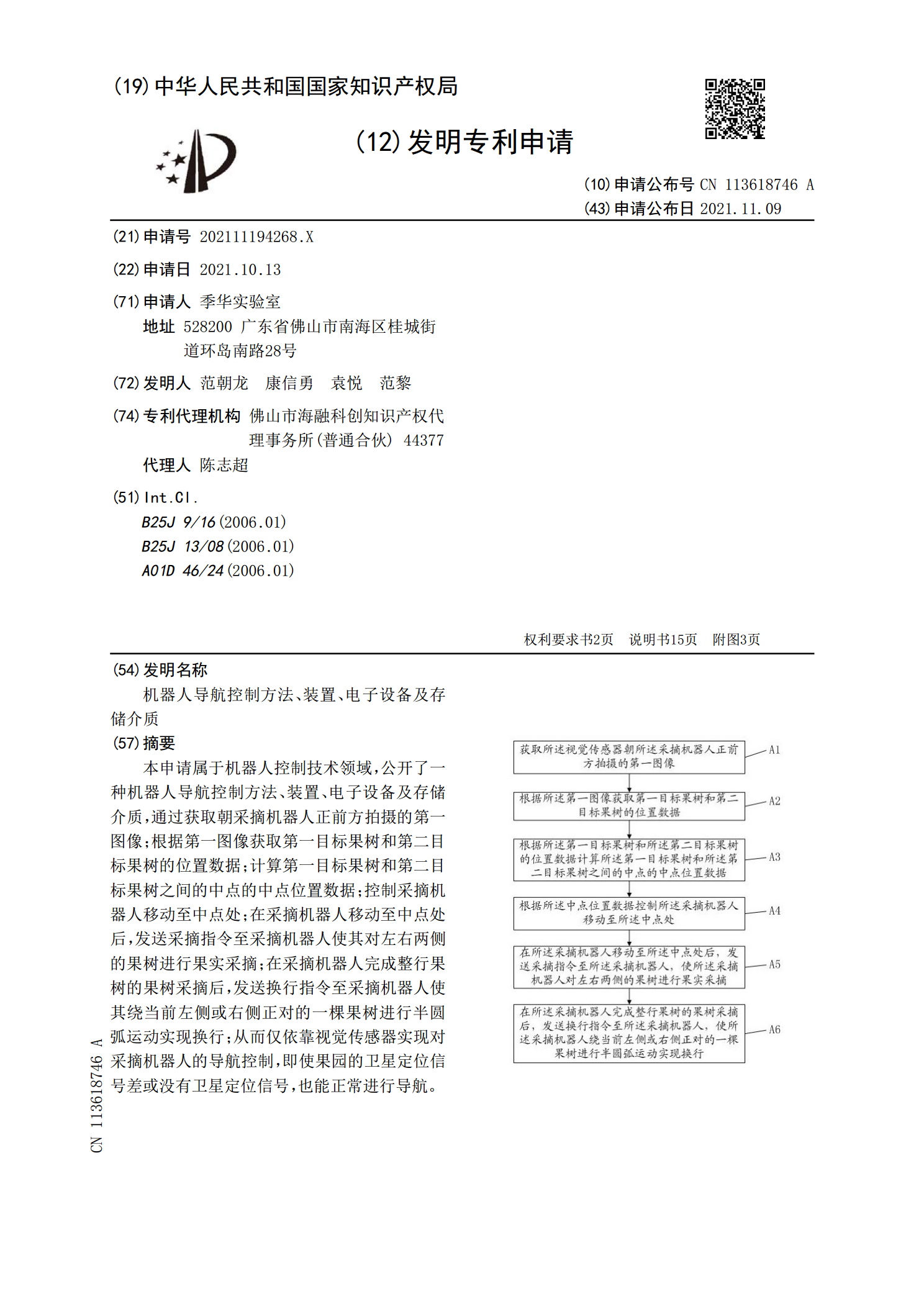
本申请属于机器人控制技术领域,公开了一种机器人导航控制方法、装置、电子设备及存储介质,通过获取朝采摘机器人正前方拍摄的第一图像;根据第一图像获取第一目标果树和第二目标果树的位置数据;计算第一目标果树和第二目标果树之间的中点的中点位置数据;控制采摘机器人移动至中点处;在采摘机器人移动至中点处后,发送采摘指令至采摘机器人使其对左右两侧的果树进行果实采摘;在采摘机器人完成整行果树的果树采摘后,发送换行指令至采摘机器人使其绕当前左侧或右侧正对的一棵果树进行半圆弧运动实现换行;从而仅依靠视觉传感器实现对采摘机器人的
基于机器视觉的缺陷检测方法、装置、终端及存储介质.pdf
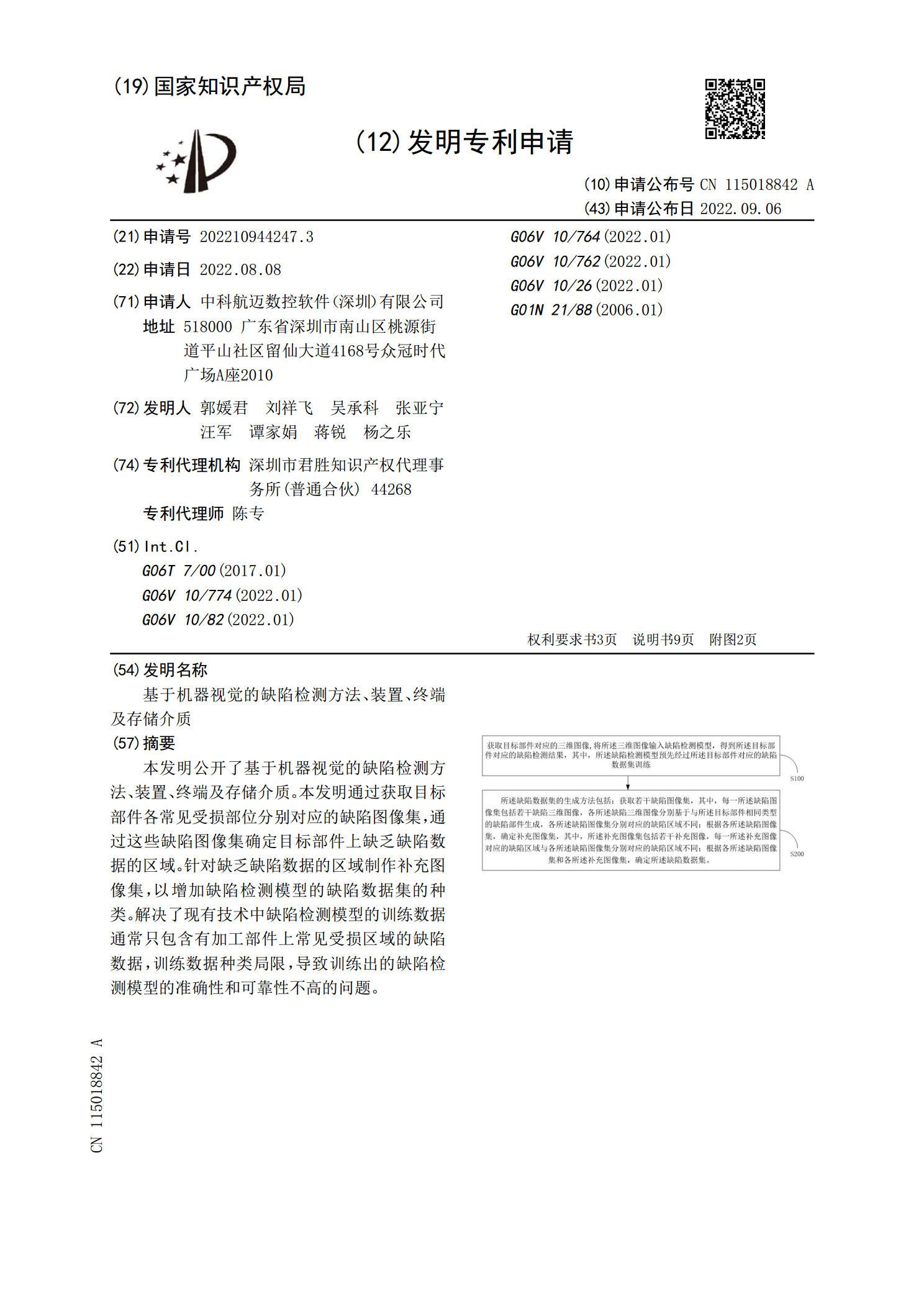
本发明公开了基于机器视觉的缺陷检测方法、装置、终端及存储介质。本发明通过获取目标部件各常见受损部位分别对应的缺陷图像集,通过这些缺陷图像集确定目标部件上缺乏缺陷数据的区域。针对缺乏缺陷数据的区域制作补充图像集,以增加缺陷检测模型的缺陷数据集的种类。解决了现有技术中缺陷检测模型的训练数据通常只包含有加工部件上常见受损区域的缺陷数据,训练数据种类局限,导致训练出的缺陷检测模型的准确性和可靠性不高的问题。