
云台的控制方法及云台.pdf

雨巷****碧易


1/10
2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
云台的控制方法及云台.pdf
一种云台的控制方法及云台,所述云台包括承载基座(11)和转动部件(12),所述转动部件用于增稳负载,所述承载基座设有姿态测量单元,所述方法包括:根据所述姿态测量单元采集的数据确定所述承载基座的运动速度;根据所述承载基座的运动速度确定目标跟随速度,以控制所述转动部件按照所述目标跟随速度跟随所述承载基座运动。通过检测在用户驱动下承载基座的运动速度可以识别用户的意图,根据承载基座的速度调整转动部件的跟随速度,可以实现跟随速度的自动切换,无需用户手动调整,更加智能。

云台的控制方法、控制设备及云台.pdf
公开了一种云台(30)的控制方法,包括:获取至少一个摇轮(21,22)的转动参数信息;向云台(30)发送转动参数信息,以使云台(30)根据转动参数信息调整云台(30)的姿态。该方法通过控制设备(20)获取其上至少一个摇轮(21,22)的转动参数信息,并将摇轮(21,22)的转动参数信息发送给云台(30),以使云台(30)根据摇轮(21,22)的转动参数信息调整云台(30)的姿态,由于摇轮(21,22)的角速度或角度值可以精确控制或计算,则根据摇轮(21,22)的角速度或角度值调整云台(30)的姿态时,可提
云台的控制方法、控制器和云台.pdf
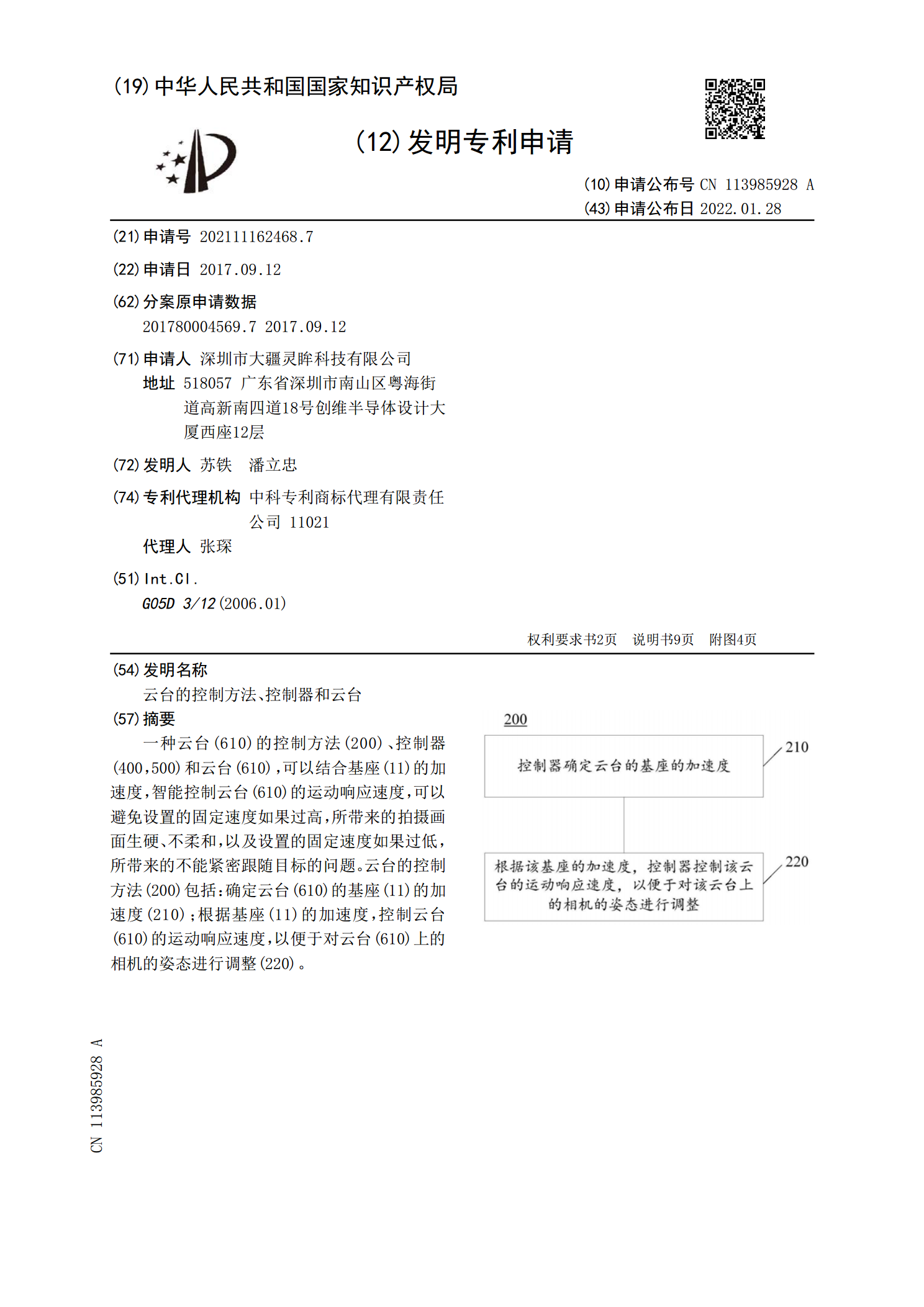
一种云台(610)的控制方法(200)、控制器(400,500)和云台(610),可以结合基座(11)的加速度,智能控制云台(610)的运动响应速度,可以避免设置的固定速度如果过高,所带来的拍摄画面生硬、不柔和,以及设置的固定速度如果过低,所带来的不能紧密跟随目标的问题。云台的控制方法(200)包括:确定云台(610)的基座(11)的加速度(210);根据基座(11)的加速度,控制云台(610)的运动响应速度,以便于对云台(610)上的相机的姿态进行调整(220)。
云台控制方法、装置、云台控制设备及存储介质.pdf
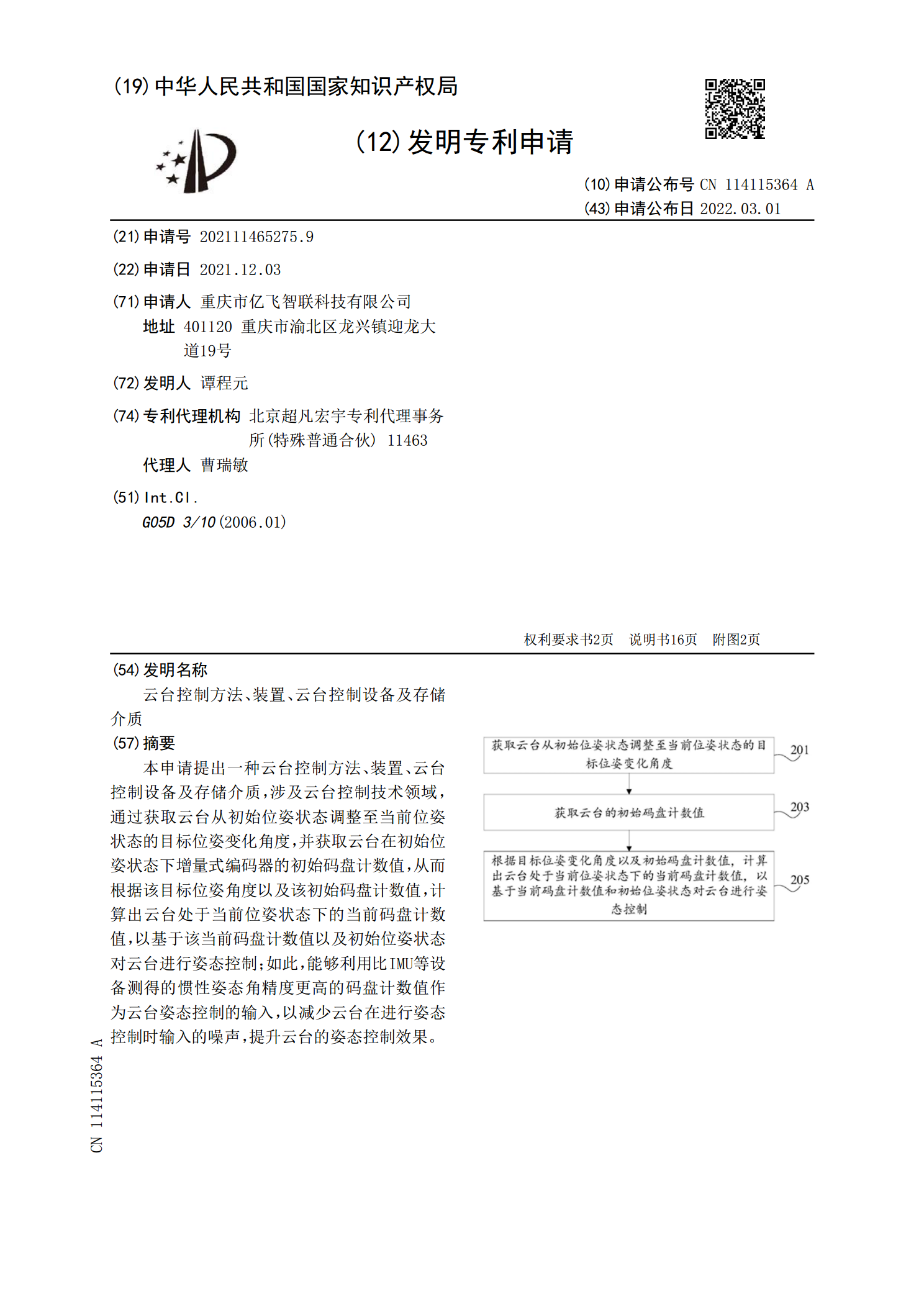
本申请提出一种云台控制方法、装置、云台控制设备及存储介质,涉及云台控制技术领域,通过获取云台从初始位姿状态调整至当前位姿状态的目标位姿变化角度,并获取云台在初始位姿状态下增量式编码器的初始码盘计数值,从而根据该目标位姿角度以及该初始码盘计数值,计算出云台处于当前位姿状态下的当前码盘计数值,以基于该当前码盘计数值以及初始位姿状态对云台进行姿态控制;如此,能够利用比IMU等设备测得的惯性姿态角精度更高的码盘计数值作为云台姿态控制的输入,以减少云台在进行姿态控制时输入的噪声,提升云台的姿态控制效果。

云台控制方法、云台和机器可读存储介质.pdf
一种云台的控制方法、云台和机器可读存储介质。该方法通过云台设有的跟随配置按钮是否被触发来调整云台跟随目标物体的跟随速度,而非通过手机APP调整云台跟随目标物体的跟随速度,能够保证云台跟随目标物体的跟随速度灵活调整。