
机载雷达动目标检测方法、装置、设备及存储介质.pdf

是你****盟主

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机载雷达动目标检测方法、装置、设备及存储介质.pdf
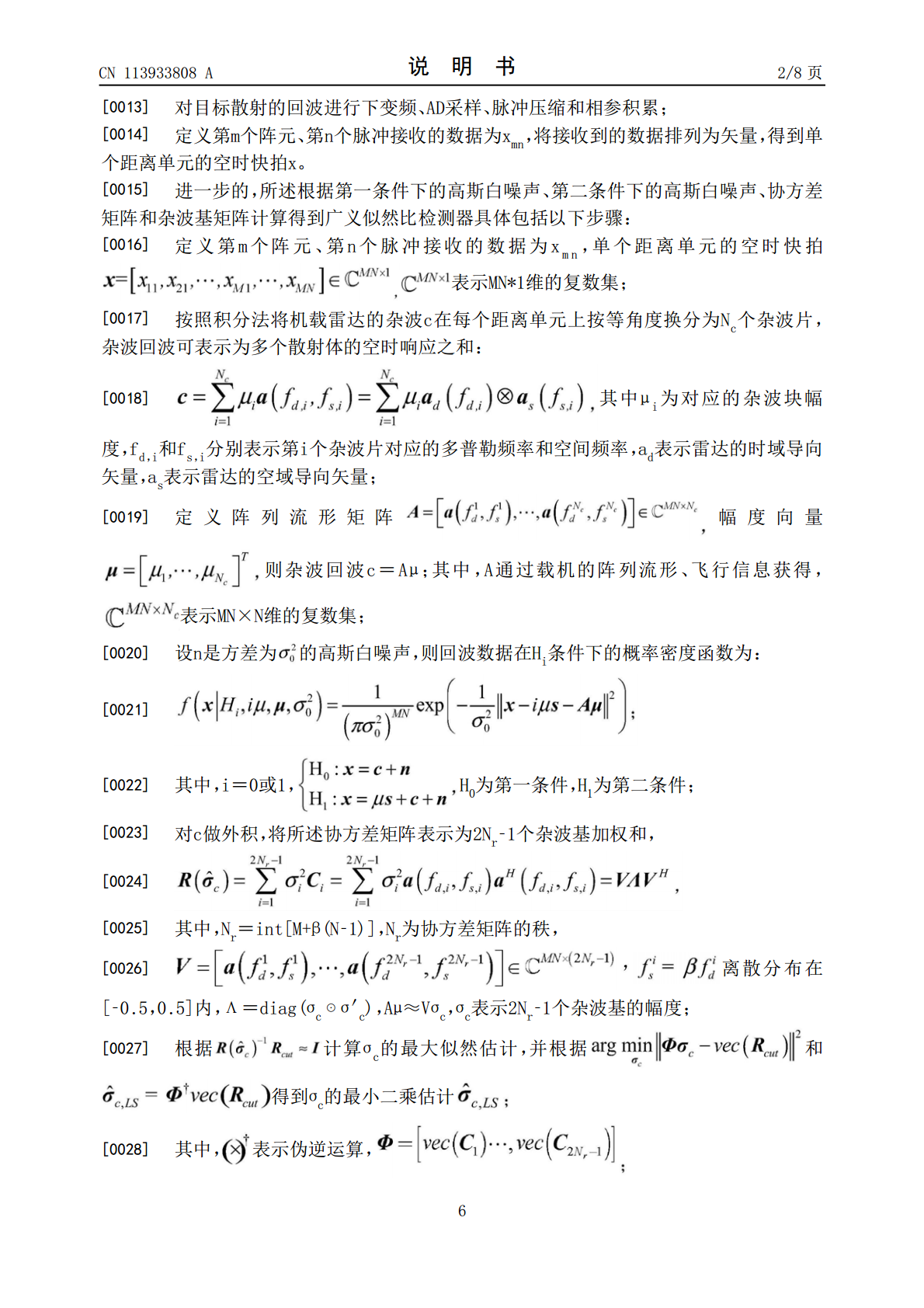
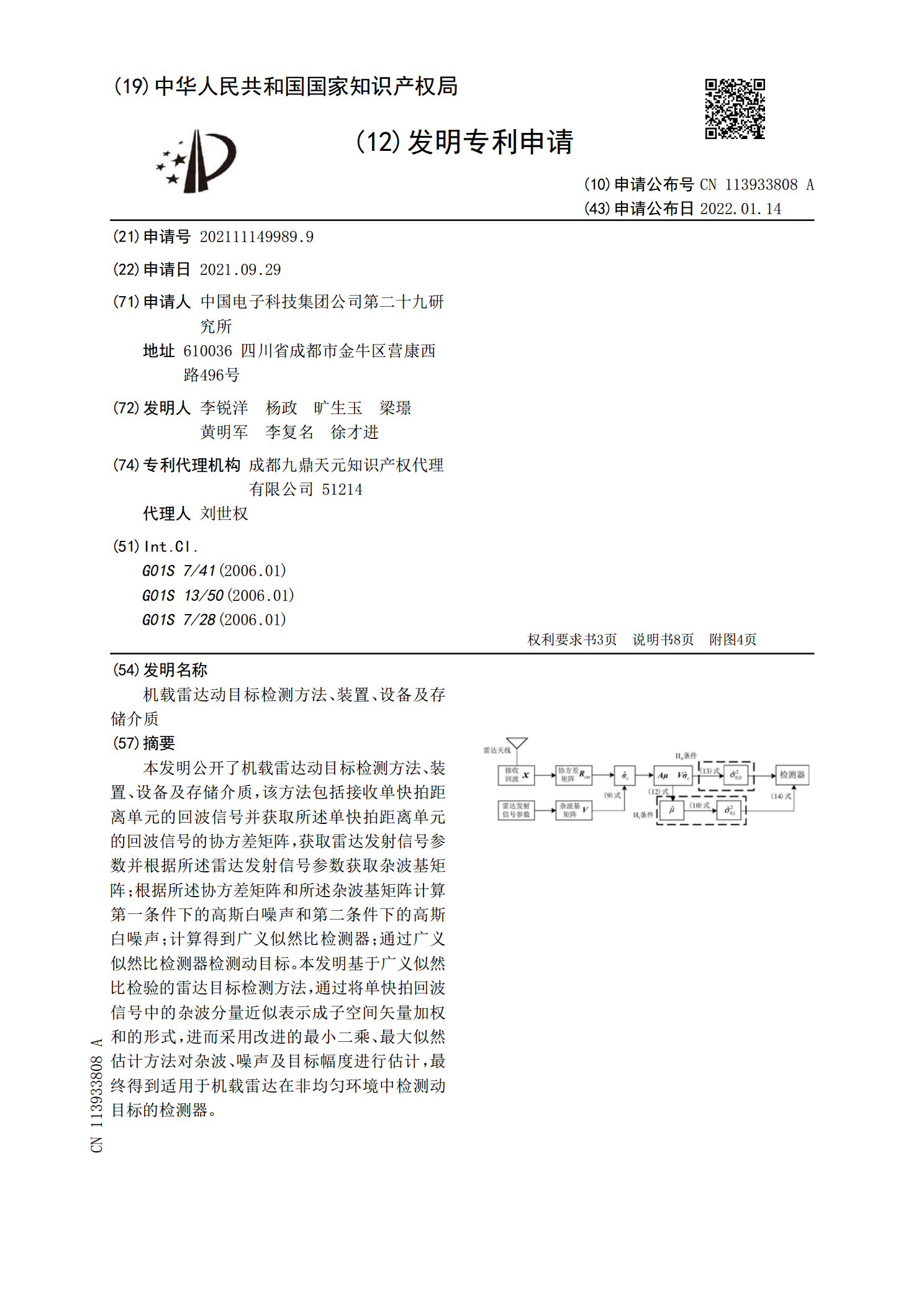
本发明公开了机载雷达动目标检测方法、装置、设备及存储介质,该方法包括接收单快拍距离单元的回波信号并获取所述单快拍距离单元的回波信号的协方差矩阵,获取雷达发射信号参数并根据所述雷达发射信号参数获取杂波基矩阵;根据所述协方差矩阵和所述杂波基矩阵计算第一条件下的高斯白噪声和第二条件下的高斯白噪声;计算得到广义似然比检测器;通过广义似然比检测器检测动目标。本发明基于广义似然比检验的雷达目标检测方法,通过将单快拍回波信号中的杂波分量近似表示成子空间矢量加权和的形式,进而采用改进的最小二乘、最大似然估计方法对杂波、噪
应用雷达检测低速目标的方法、装置、存储介质和设备.pdf
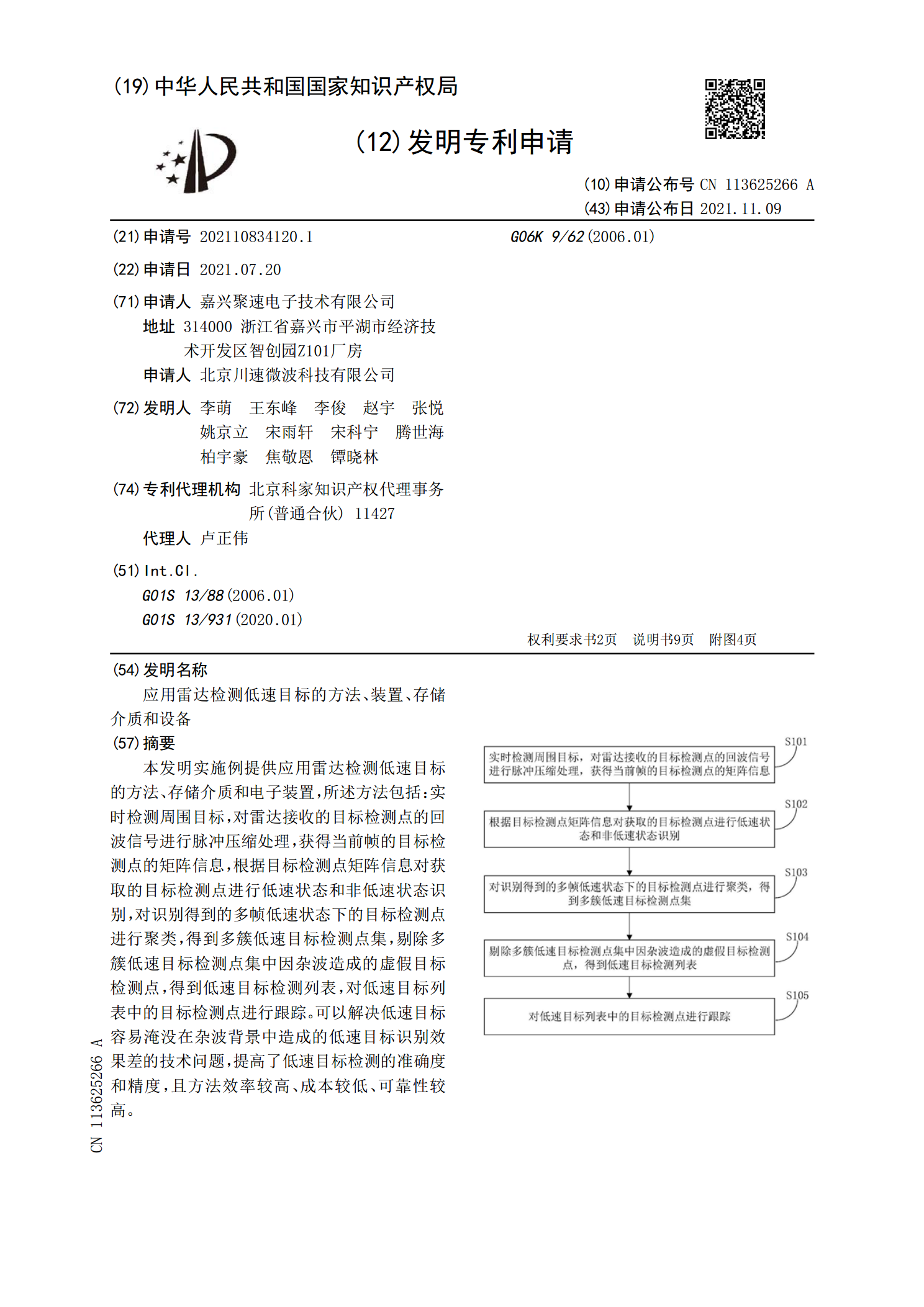
本发明实施例提供应用雷达检测低速目标的方法、存储介质和电子装置,所述方法包括:实时检测周围目标,对雷达接收的目标检测点的回波信号进行脉冲压缩处理,获得当前帧的目标检测点的矩阵信息,根据目标检测点矩阵信息对获取的目标检测点进行低速状态和非低速状态识别,对识别得到的多帧低速状态下的目标检测点进行聚类,得到多簇低速目标检测点集,剔除多簇低速目标检测点集中因杂波造成的虚假目标检测点,得到低速目标检测列表,对低速目标列表中的目标检测点进行跟踪。可以解决低速目标容易淹没在杂波背景中造成的低速目标识别效果差的技术问题,
用于雷达的目标检测模型训练方法、装置及存储介质.pdf
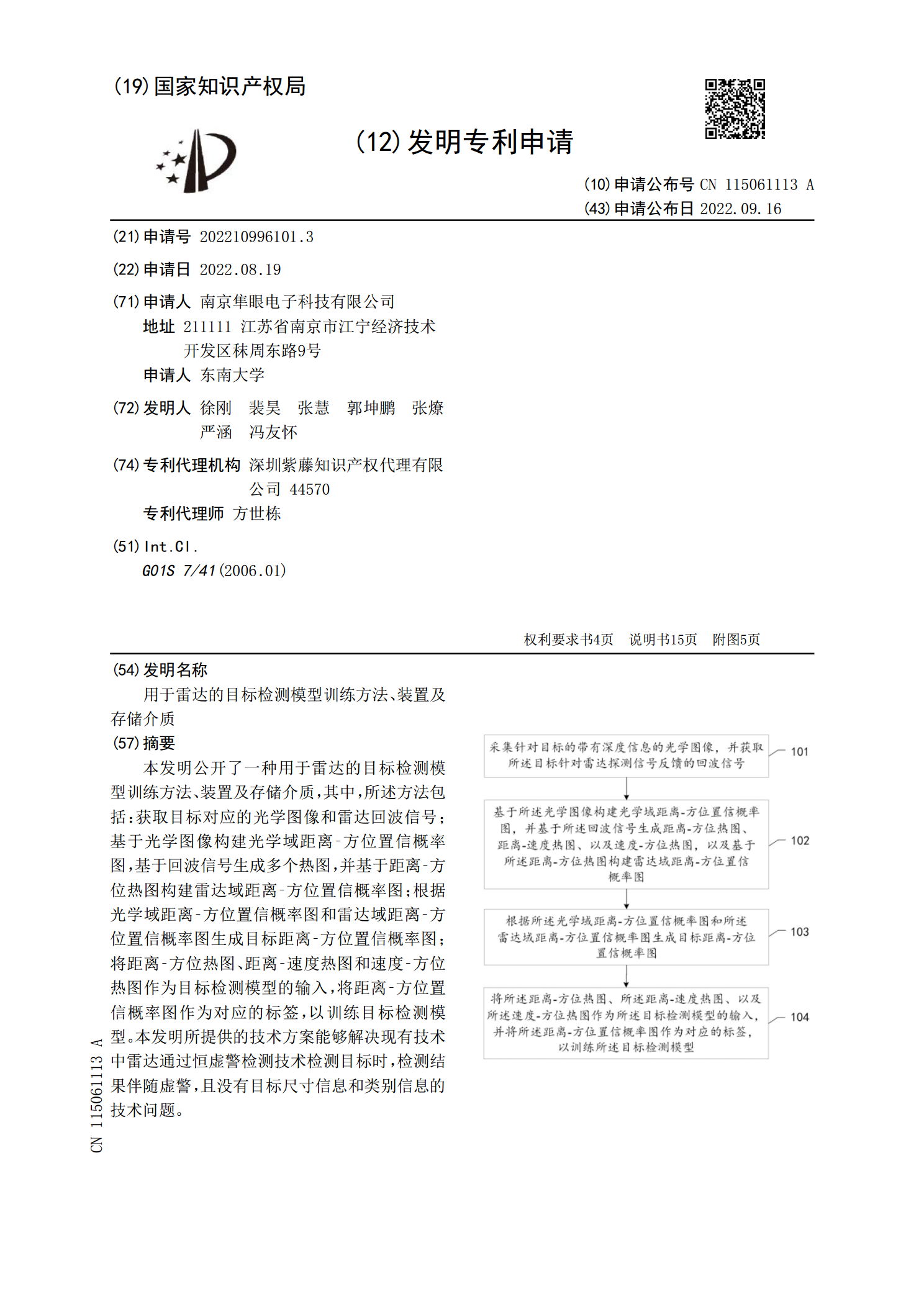
本发明公开了一种用于雷达的目标检测模型训练方法、装置及存储介质,其中,所述方法包括:获取目标对应的光学图像和雷达回波信号;基于光学图像构建光学域距离‑方位置信概率图,基于回波信号生成多个热图,并基于距离‑方位热图构建雷达域距离‑方位置信概率图;根据光学域距离‑方位置信概率图和雷达域距离‑方位置信概率图生成目标距离‑方位置信概率图;将距离‑方位热图、距离‑速度热图和速度‑方位热图作为目标检测模型的输入,将距离‑方位置信概率图作为对应的标签,以训练目标检测模型。本发明所提供的技术方案能够解决现有技术中雷达通过
用于雷达驱动的检测方法、装置、设备及存储介质.pdf
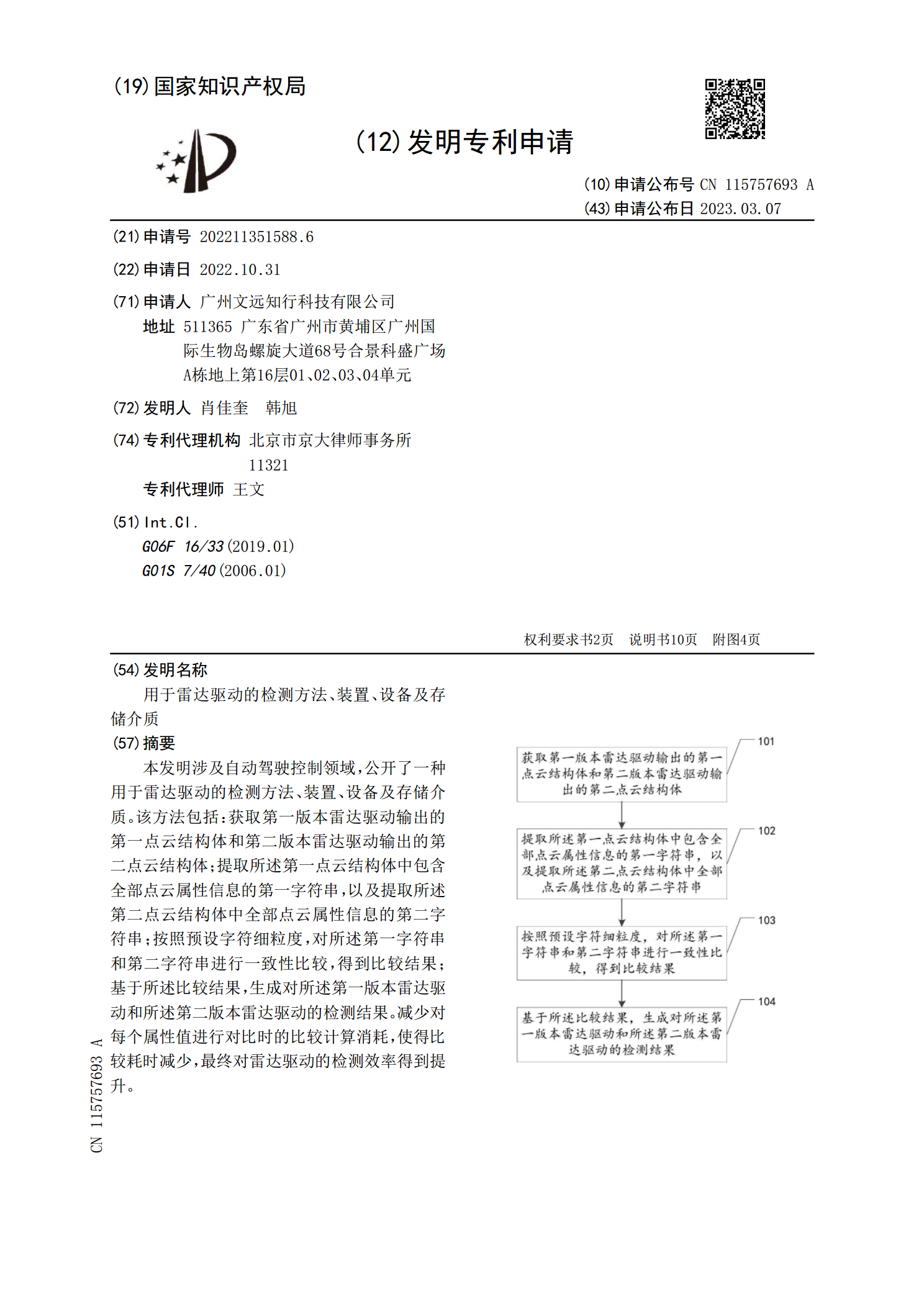
本发明涉及自动驾驶控制领域,公开了一种用于雷达驱动的检测方法、装置、设备及存储介质。该方法包括:获取第一版本雷达驱动输出的第一点云结构体和第二版本雷达驱动输出的第二点云结构体;提取所述第一点云结构体中包含全部点云属性信息的第一字符串,以及提取所述第二点云结构体中全部点云属性信息的第二字符串;按照预设字符细粒度,对所述第一字符串和第二字符串进行一致性比较,得到比较结果;基于所述比较结果,生成对所述第一版本雷达驱动和所述第二版本雷达驱动的检测结果。减少对每个属性值进行对比时的比较计算消耗,使得比较耗时减少,最
基于雷达图像的目标检测方法、装置、设备及介质.pdf
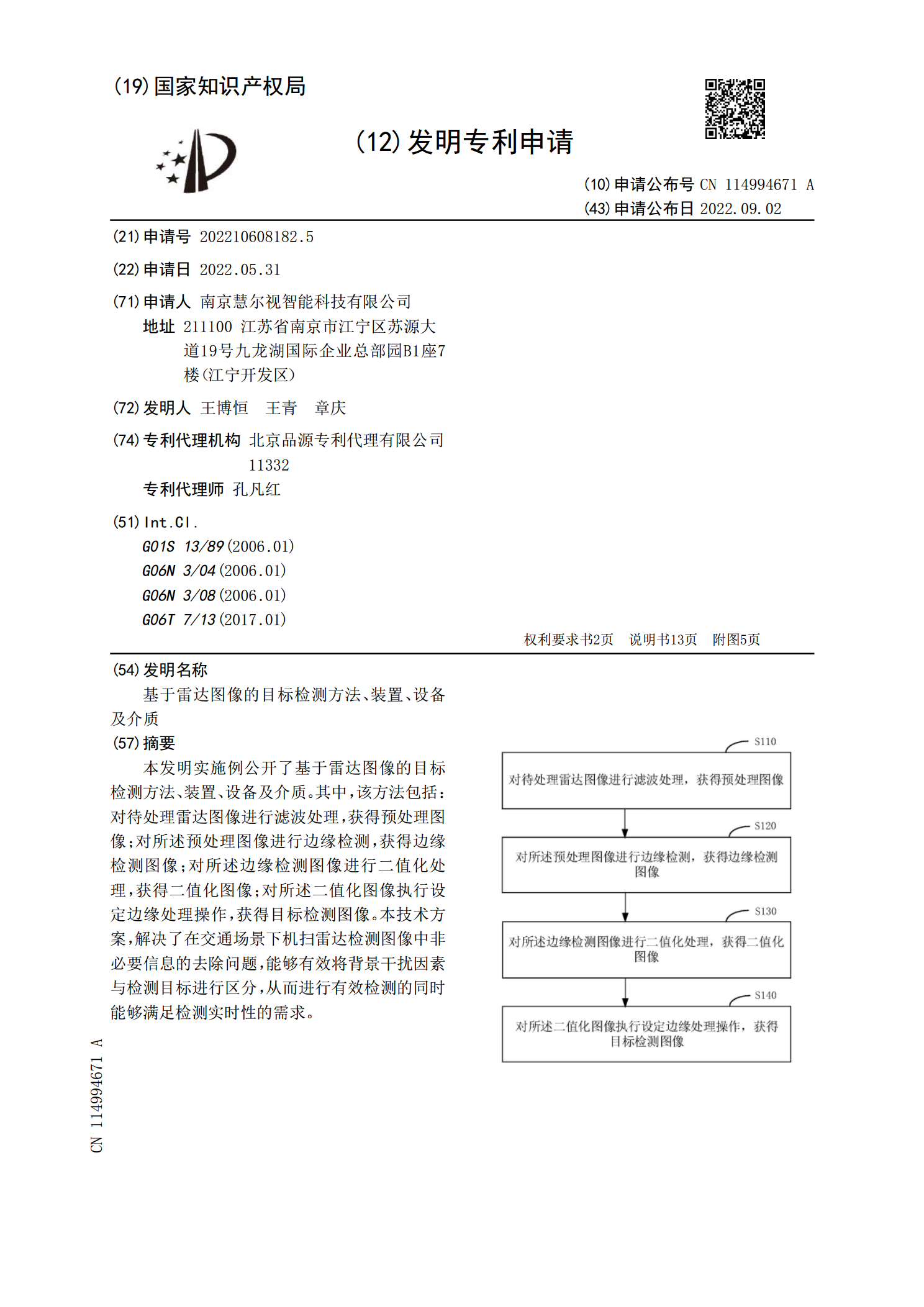
本发明实施例公开了基于雷达图像的目标检测方法、装置、设备及介质。其中,该方法包括:对待处理雷达图像进行滤波处理,获得预处理图像;对所述预处理图像进行边缘检测,获得边缘检测图像;对所述边缘检测图像进行二值化处理,获得二值化图像;对所述二值化图像执行设定边缘处理操作,获得目标检测图像。本技术方案,解决了在交通场景下机扫雷达检测图像中非必要信息的去除问题,能够有效将背景干扰因素与检测目标进行区分,从而进行有效检测的同时能够满足检测实时性的需求。