
基于雷达图像的目标检测方法、装置、设备及介质.pdf

猫巷****奕声

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于雷达图像的目标检测方法、装置、设备及介质.pdf
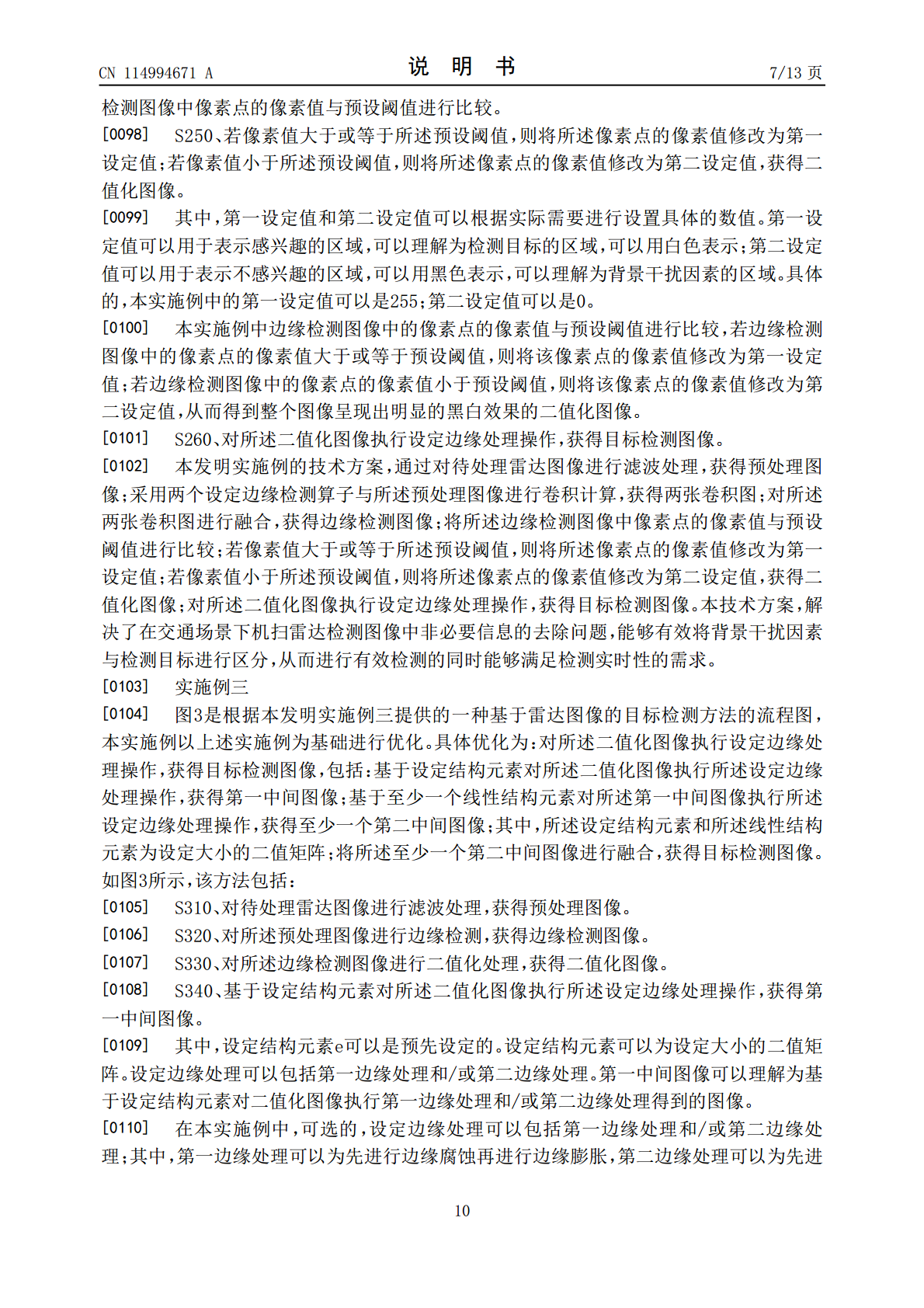
本发明实施例公开了基于雷达图像的目标检测方法、装置、设备及介质。其中,该方法包括:对待处理雷达图像进行滤波处理,获得预处理图像;对所述预处理图像进行边缘检测,获得边缘检测图像;对所述边缘检测图像进行二值化处理,获得二值化图像;对所述二值化图像执行设定边缘处理操作,获得目标检测图像。本技术方案,解决了在交通场景下机扫雷达检测图像中非必要信息的去除问题,能够有效将背景干扰因素与检测目标进行区分,从而进行有效检测的同时能够满足检测实时性的需求。
基于人脸图像的身份检测方法、装置、介质及设备.pdf
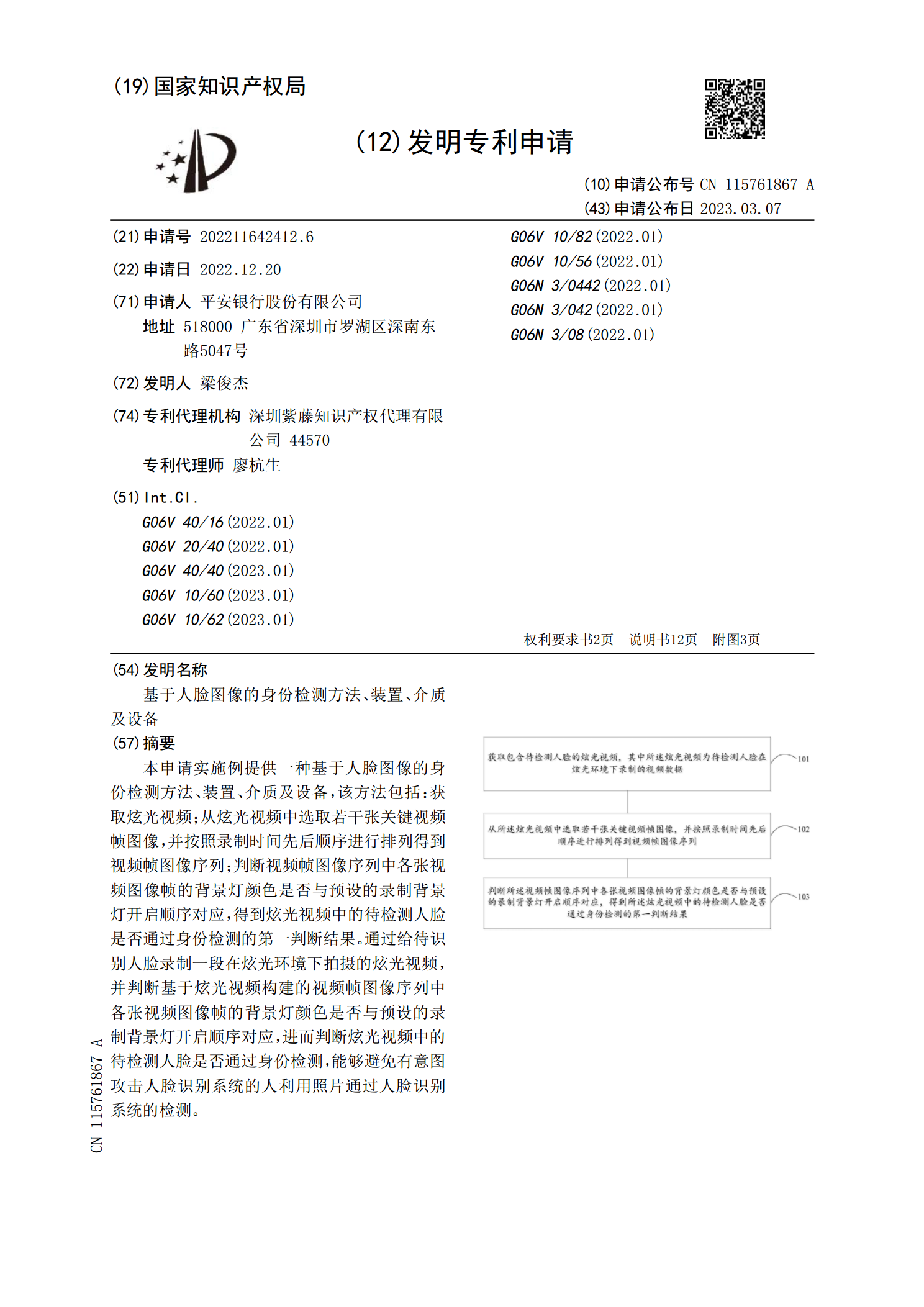
本申请实施例提供一种基于人脸图像的身份检测方法、装置、介质及设备,该方法包括:获取炫光视频;从炫光视频中选取若干张关键视频帧图像,并按照录制时间先后顺序进行排列得到视频帧图像序列;判断视频帧图像序列中各张视频图像帧的背景灯颜色是否与预设的录制背景灯开启顺序对应,得到炫光视频中的待检测人脸是否通过身份检测的第一判断结果。通过给待识别人脸录制一段在炫光环境下拍摄的炫光视频,并判断基于炫光视频构建的视频帧图像序列中各张视频图像帧的背景灯颜色是否与预设的录制背景灯开启顺序对应,进而判断炫光视频中的待检测人脸是否通
基于人脸图像的炫光程度检测方法、装置、设备及介质.pdf
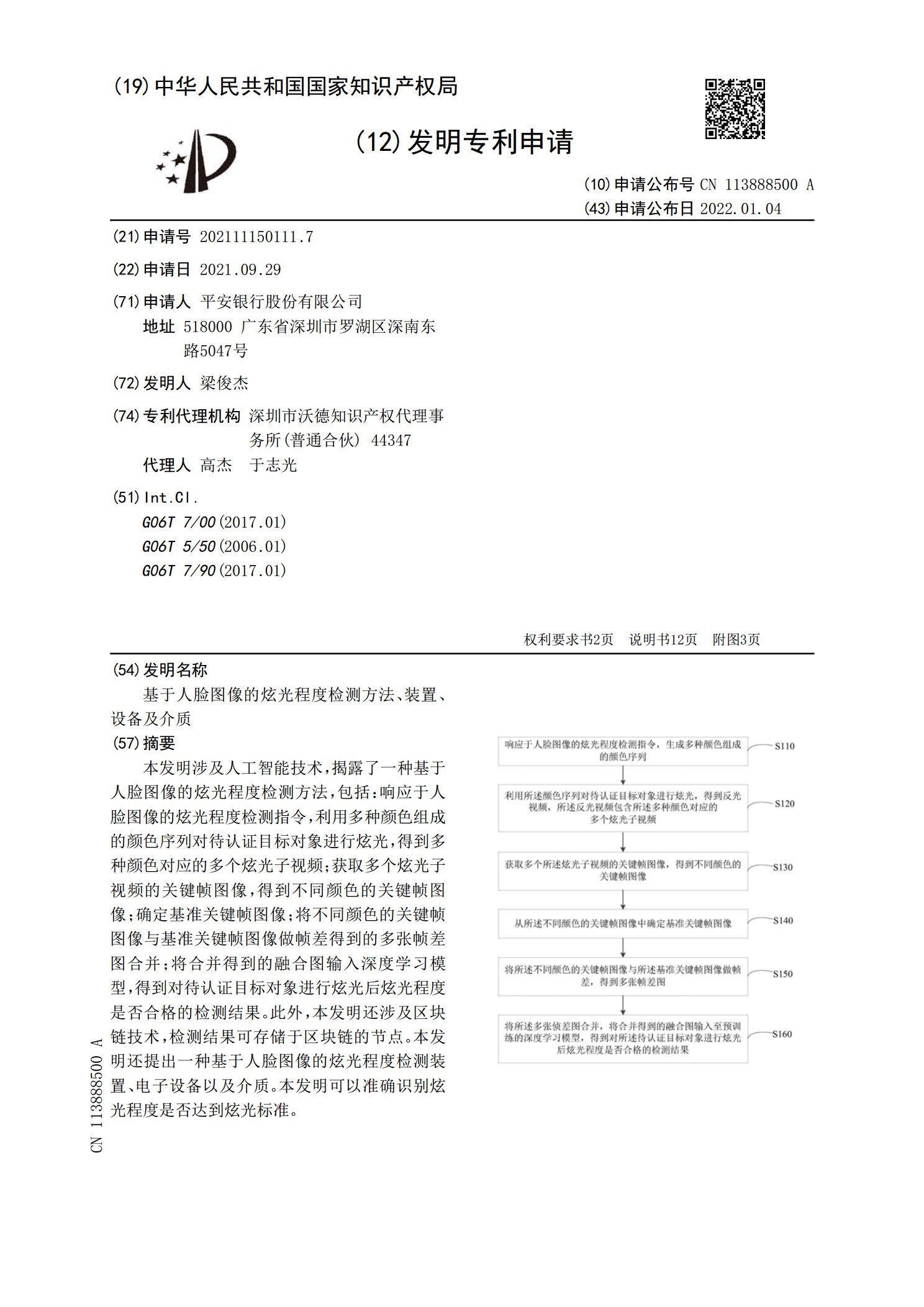
本发明涉及人工智能技术,揭露了一种基于人脸图像的炫光程度检测方法,包括:响应于人脸图像的炫光程度检测指令,利用多种颜色组成的颜色序列对待认证目标对象进行炫光,得到多种颜色对应的多个炫光子视频;获取多个炫光子视频的关键帧图像,得到不同颜色的关键帧图像;确定基准关键帧图像;将不同颜色的关键帧图像与基准关键帧图像做帧差得到的多张帧差图合并;将合并得到的融合图输入深度学习模型,得到对待认证目标对象进行炫光后炫光程度是否合格的检测结果。此外,本发明还涉及区块链技术,检测结果可存储于区块链的节点。本发明还提出一种基于
基于图像增强的多尺度行人检测方法、装置、设备及介质.pdf
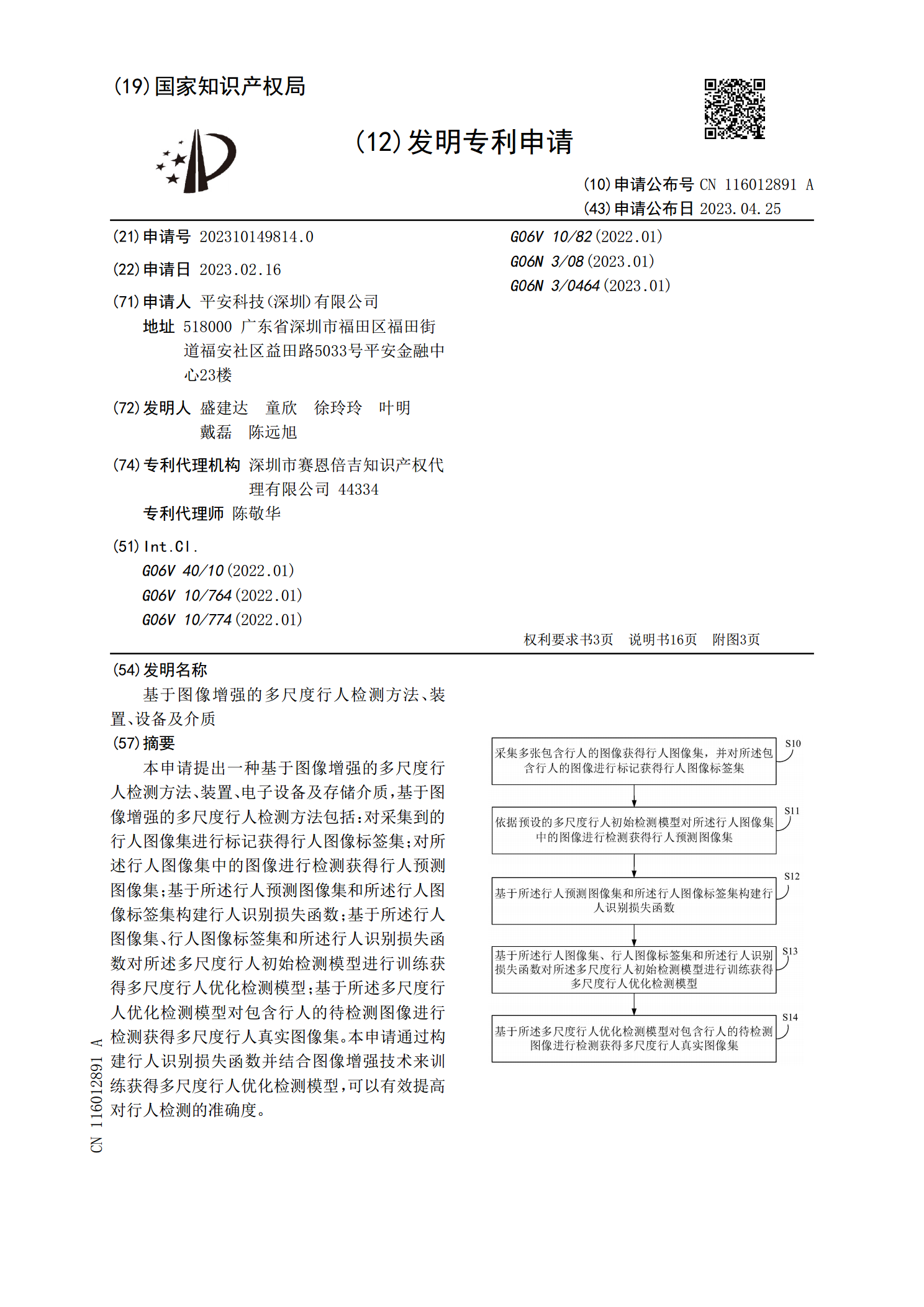
本申请提出一种基于图像增强的多尺度行人检测方法、装置、电子设备及存储介质,基于图像增强的多尺度行人检测方法包括:对采集到的行人图像集进行标记获得行人图像标签集;对所述行人图像集中的图像进行检测获得行人预测图像集;基于所述行人预测图像集和所述行人图像标签集构建行人识别损失函数;基于所述行人图像集、行人图像标签集和所述行人识别损失函数对所述多尺度行人初始检测模型进行训练获得多尺度行人优化检测模型;基于所述多尺度行人优化检测模型对包含行人的待检测图像进行检测获得多尺度行人真实图像集。本申请通过构建行人识别损失函
机载雷达动目标检测方法、装置、设备及存储介质.pdf
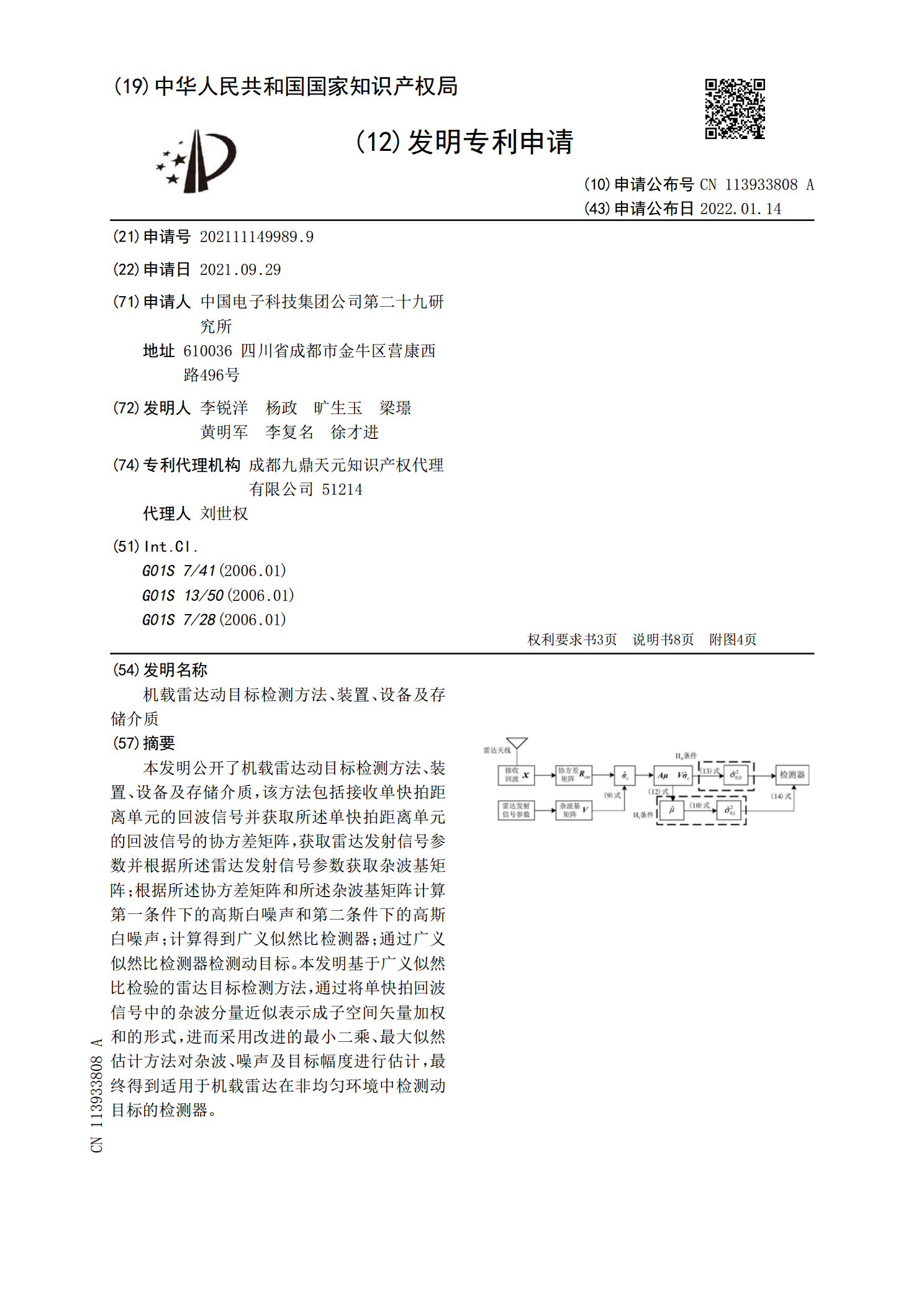
本发明公开了机载雷达动目标检测方法、装置、设备及存储介质,该方法包括接收单快拍距离单元的回波信号并获取所述单快拍距离单元的回波信号的协方差矩阵,获取雷达发射信号参数并根据所述雷达发射信号参数获取杂波基矩阵;根据所述协方差矩阵和所述杂波基矩阵计算第一条件下的高斯白噪声和第二条件下的高斯白噪声;计算得到广义似然比检测器;通过广义似然比检测器检测动目标。本发明基于广义似然比检验的雷达目标检测方法,通过将单快拍回波信号中的杂波分量近似表示成子空间矢量加权和的形式,进而采用改进的最小二乘、最大似然估计方法对杂波、噪