
一种无人艇环境自适应多尺度目标检测方法及系统.pdf

海昌****姐淑


1/10
2/10
3/10
4/10
5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人艇环境自适应多尺度目标检测方法及系统.pdf
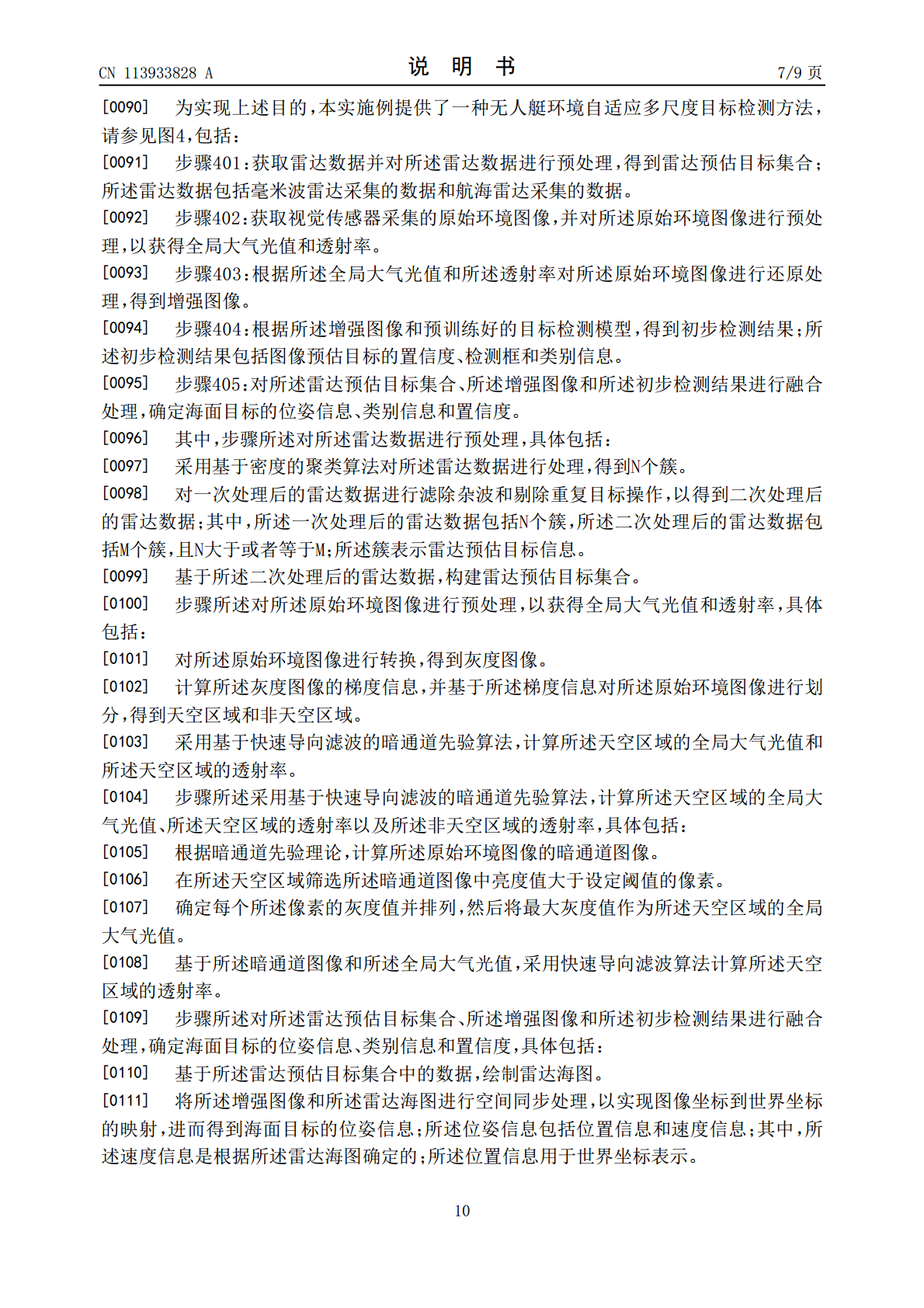
本发明公开了一种无人艇环境自适应多尺度目标检测方法及系统,涉及无人艇以及多传感器融合技术领域,该方法包括:对获取的雷达数据进行预处理,得到雷达预估目标集合;雷达数据包括毫米波雷达采集的数据和航海雷达采集的数据;对视觉传感器采集的原始环境图像进行预处理,以获得全局大气光值和透射率;根据全局大气光值和透射率对原始环境图像进行还原处理,得到增强图像;根据增强图像和预训练好的目标检测模型,得到初步检测结果;初步检测结果包括图像预估目标的置信度、检测框和类别信息;对雷达预估目标集合、增强图像和初步检测结果进行融合处
一种无人艇水面目标融合检测方法及系统.pdf
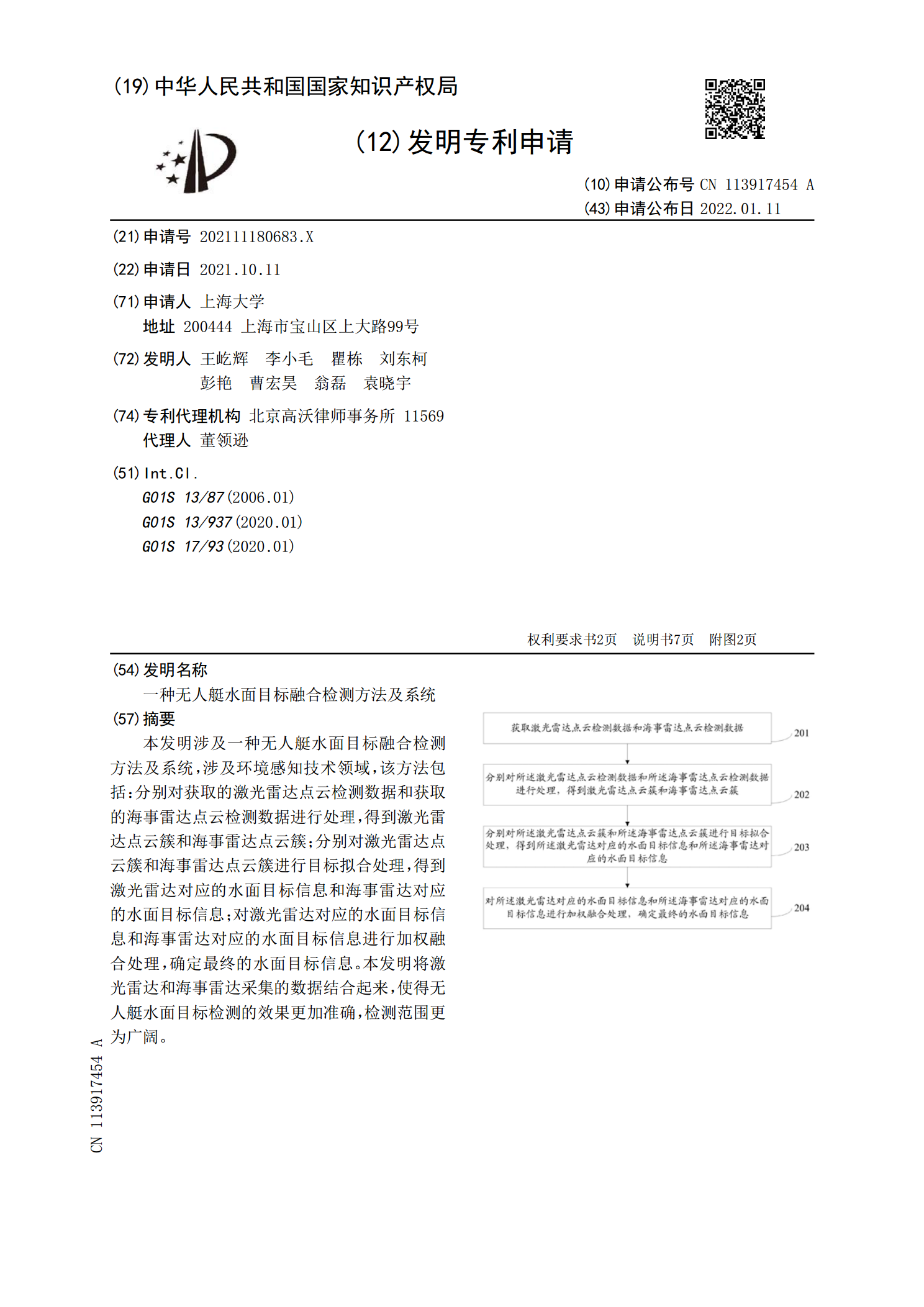
本发明涉及一种无人艇水面目标融合检测方法及系统,涉及环境感知技术领域,该方法包括:分别对获取的激光雷达点云检测数据和获取的海事雷达点云检测数据进行处理,得到激光雷达点云簇和海事雷达点云簇;分别对激光雷达点云簇和海事雷达点云簇进行目标拟合处理,得到激光雷达对应的水面目标信息和海事雷达对应的水面目标信息;对激光雷达对应的水面目标信息和海事雷达对应的水面目标信息进行加权融合处理,确定最终的水面目标信息。本发明将激光雷达和海事雷达采集的数据结合起来,使得无人艇水面目标检测的效果更加准确,检测范围更为广阔。

基于多尺度特征融合的自适应无人机目标检测.pptx
添加副标题目录PART01PART02无人机目标检测的定义和重要性无人机目标检测的常见方法多尺度特征融合在无人机目标检测中的应用PART03多尺度特征融合的基本原理多尺度特征融合的方法和策略多尺度特征融合在目标检测中的优势和挑战PART04自适应算法的基本原理和常见方法自适应算法在无人机目标检测中的应用和优势自适应算法的挑战和未来发展方向PART05系统设计的基本原则和流程特征提取和融合模块的设计与实现自适应算法模块的设计与实现系统测试和性能评估PART06案例一:某型无人机目标检测系统的设计与实现案例二

一种轻量化的无人艇目标检测方法.pdf
本发明提供了一种轻量化的无人艇海面目标检测方法,通过使用Mosaic图像扩增,丰富了图像的背景信息并增加了小尺度目标的数量,提高了海面小目标的检测精度。通过使用轻量化的网络ShuffleNetv2作为YOLOv5网络结构中的特征提取网络,使用深度可分离卷积代替YOLOv5中的Bottleneck模块,显著降低了模型的参数量,大幅度提高了在嵌入式设备上的检测速度。相对于原本的YOLOv5网络,具有更快的处理速度,充分满足无人艇在检测海面目标时对于实时性的要求。本发明解决现有的目标检测算法无法在算力有限的嵌入

无人艇雷达图像目标检测系统的研究.docx
无人艇雷达图像目标检测系统的研究无人艇雷达图像目标检测系统的研究摘要:随着无人艇技术的不断发展,无人艇在海洋勘测和救援等领域起到了重要的作用。然而,在海洋环境中,众多目标的存在给无人艇的探测带来了挑战。本文基于雷达图像数据,研究了无人艇雷达图像目标检测系统。首先介绍了无人艇雷达图像的特点和背景,然后详细讨论了目标检测的一般流程,并提出了一种基于深度学习的目标检测方法。最后,通过实验验证了所提方法的有效性和性能。关键词:无人艇,雷达图像,目标检测,深度学习一、引言无人艇技术的发展,不仅能够应对一些危险环境下