
一种基于超图匹配的多智能网联汽车协同目标跟踪方法.pdf

Jo****34


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于超图匹配的多智能网联汽车协同目标跟踪方法.pdf
本发明公开了一种基于超图匹配的多智能网联汽车协同目标跟踪方法,主车和协同车分别利用车载传感器获取各自检测范围内目标的观测数据,并各自利用深度网络和滤波算法计算k时刻跟踪目标的外观特征与位置;协同车将其所跟踪目标位置、外观特征及协同车自身定位信息发送给主车,主车接收到协同车发送的信息,并计算协同车在主车坐标系中的相对位姿、协同车的跟踪目标在主车坐标系中的位置坐标;对主车跟踪的目标与协同车跟踪的目标分别构造超图并计算各超边的相似度;基于融合相似度,建立目标关联的超图匹配模型,将目标关联转化为求解超图匹配的最优

一种用于智能网联汽车的协同路径跟踪方法.pdf
本发明属于智能网联汽车领域,具体涉及一种用于智能网联汽车的协同路径跟踪方法。本发明将协同路径跟踪设计为两层控制结构:下层称为路径跟踪,负责使一组车辆以参数化的方式收敛到期望路径,而上层称为网络化协调层,其目标是同步路径参数,并使其沿路径以相同的参数化期望速度曲线变化。从而确保车辆到达期望的编队,且单车速度曲线与路径和编队兼容。基于V2V和事件触发机制的通信系统定义通信触发条件逻辑,车辆之间在离散时刻异步交换消息,避免以固定速率通信,并且仅在满足触发逻辑条件时触发通信,减少传输的信息量,降低对传输带宽的要求

一种基于视觉的智能网联公交场景下目标跟踪方法及系统.pdf
本发明涉及一种基于视觉的智能网联公交场景下目标跟踪方法及系统,其中目标跟踪方法包括:步骤1:获取智能网联公交场景下训练图像集合;步骤2:分别构建基于CenterNet的目标检测模型和基于DeepSORT的目标追踪模型;步骤3:使用训练图像集合对目标检测模型和目标追踪模型进行端到端训练;步骤4:获取智能网联公交场景下的实时图像,实现目标跟踪。与现有技术相比,本发明具有精度高、速度快等优点。

基于多特征匹配的多目标跟踪方法.pdf
一种基于多特征匹配的多目标跟踪算法,其步骤是:首先,针对量测点与目标关联时,匹配特征数量过少的问题,建立了所有目标的特征矩阵,特征矩阵包含了所有目标的检验统计量特征和多普勒频率特征;其次,在寻找最佳关联点时,将所有关联点的特征与目标的特征矩阵进行比对,找出与目标匹配度最高的关联点;最后,确定目标在当前跟踪时刻的运动状态估计值、检验统计量和多普勒频率特征,用于对目标在当前跟踪时刻之后运动状态的估计。本发明通过建立特征矩阵,并寻找与目标特征矩阵最匹配的关联点,解决了当多目标轨迹交叉重叠时目标轨迹跟踪不准确的问
基于自主绕障的异构型多智能体网联协同调度规划方法.pdf
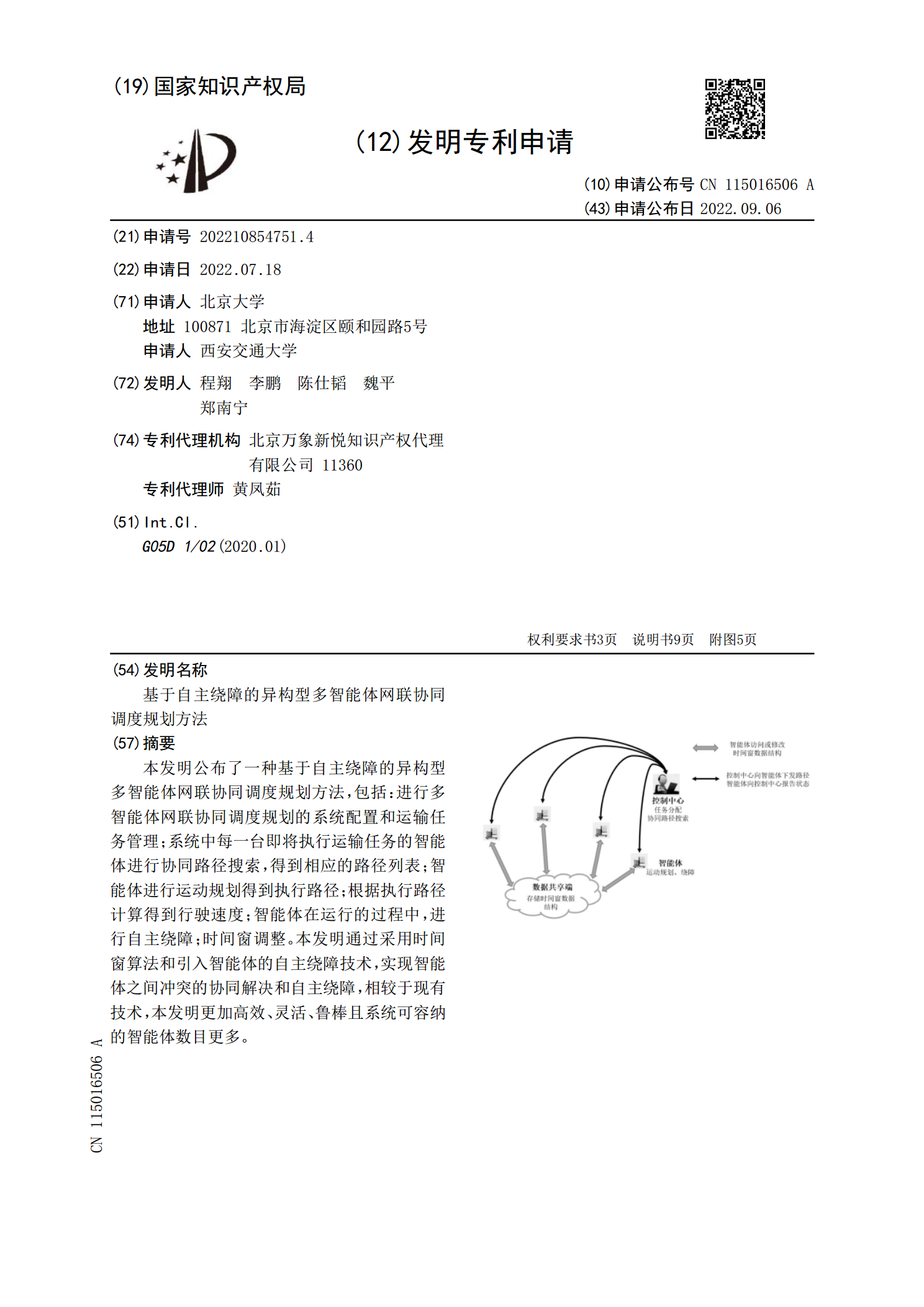
本发明公布了一种基于自主绕障的异构型多智能体网联协同调度规划方法,包括:进行多智能体网联协同调度规划的系统配置和运输任务管理;系统中每一台即将执行运输任务的智能体进行协同路径搜索,得到相应的路径列表;智能体进行运动规划得到执行路径;根据执行路径计算得到行驶速度;智能体在运行的过程中,进行自主绕障;时间窗调整。本发明通过采用时间窗算法和引入智能体的自主绕障技术,实现智能体之间冲突的协同解决和自主绕障,相较于现有技术,本发明更加高效、灵活、鲁棒且系统可容纳的智能体数目更多。