
一种基于视觉的智能网联公交场景下目标跟踪方法及系统.pdf

如灵****姐姐


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于视觉的智能网联公交场景下目标跟踪方法及系统.pdf
本发明涉及一种基于视觉的智能网联公交场景下目标跟踪方法及系统,其中目标跟踪方法包括:步骤1:获取智能网联公交场景下训练图像集合;步骤2:分别构建基于CenterNet的目标检测模型和基于DeepSORT的目标追踪模型;步骤3:使用训练图像集合对目标检测模型和目标追踪模型进行端到端训练;步骤4:获取智能网联公交场景下的实时图像,实现目标跟踪。与现有技术相比,本发明具有精度高、速度快等优点。

基于视觉的动态场景下目标跟踪方法研究.pptx
基于视觉的动态场景下目标跟踪方法研究目录添加章节标题研究背景与意义研究背景研究意义动态场景下目标跟踪方法概述目标跟踪方法分类动态场景下目标跟踪的难点现有方法及局限性基于视觉的目标检测与特征提取目标检测算法特征提取方法实验结果与分析动态场景下目标跟踪算法研究运动模型建立跟踪算法设计实验结果与分析算法性能评估与对比分析评估指标与方法实验结果对比分析性能优劣分析总结与展望研究成果总结未来研究方向展望THANKYOU

基于视觉的动态场景下目标跟踪方法研究.docx
基于视觉的动态场景下目标跟踪方法研究摘要:目标跟踪是计算机视觉领域的重要研究方向之一,尤其是在场景感知、智能监控、自动驾驶等领域中起到了至关重要的作用。本文针对基于视觉的动态场景下目标跟踪方法进行了深入研究,介绍了目标跟踪的基本原理和常见的跟踪算法,讨论了应用于动态环境下目标跟踪的挑战及其解决方法,最后对未来发展方向进行了展望。关键词:目标跟踪、图像处理、动态场景、物体检测、机器学习算法一、引言目标跟踪是指在连续的图像序列中,跟踪视频中出现的目标,并持续输出目标的位置、姿态等信息。目标跟踪技术在计算机视觉

基于视觉的动态场景下目标跟踪方法研究的开题报告.docx
基于视觉的动态场景下目标跟踪方法研究的开题报告一、研究背景目标跟踪是计算机视觉领域的重要研究方向之一,目标跟踪可以应用于许多领域,如视频监控、智能交通、智能家居等。在基于视觉的目标跟踪中,目标通常是在动态场景中进行跟踪,其中包括目标的运动、相机姿态的变化、复杂的背景干扰等因素。因此,如何实现高精度、高效率的目标跟踪是一个热门的研究课题。二、研究目的本论文旨在针对基于视觉的动态场景下目标跟踪,研究不同的跟踪方法及其效果,评估各种技术的优缺点,为开发更准确、更高效的目标跟踪算法提供指导。三、研究内容1.对目标
一种基于智能网联公交的主动式应急医疗救援系统及方法.pdf
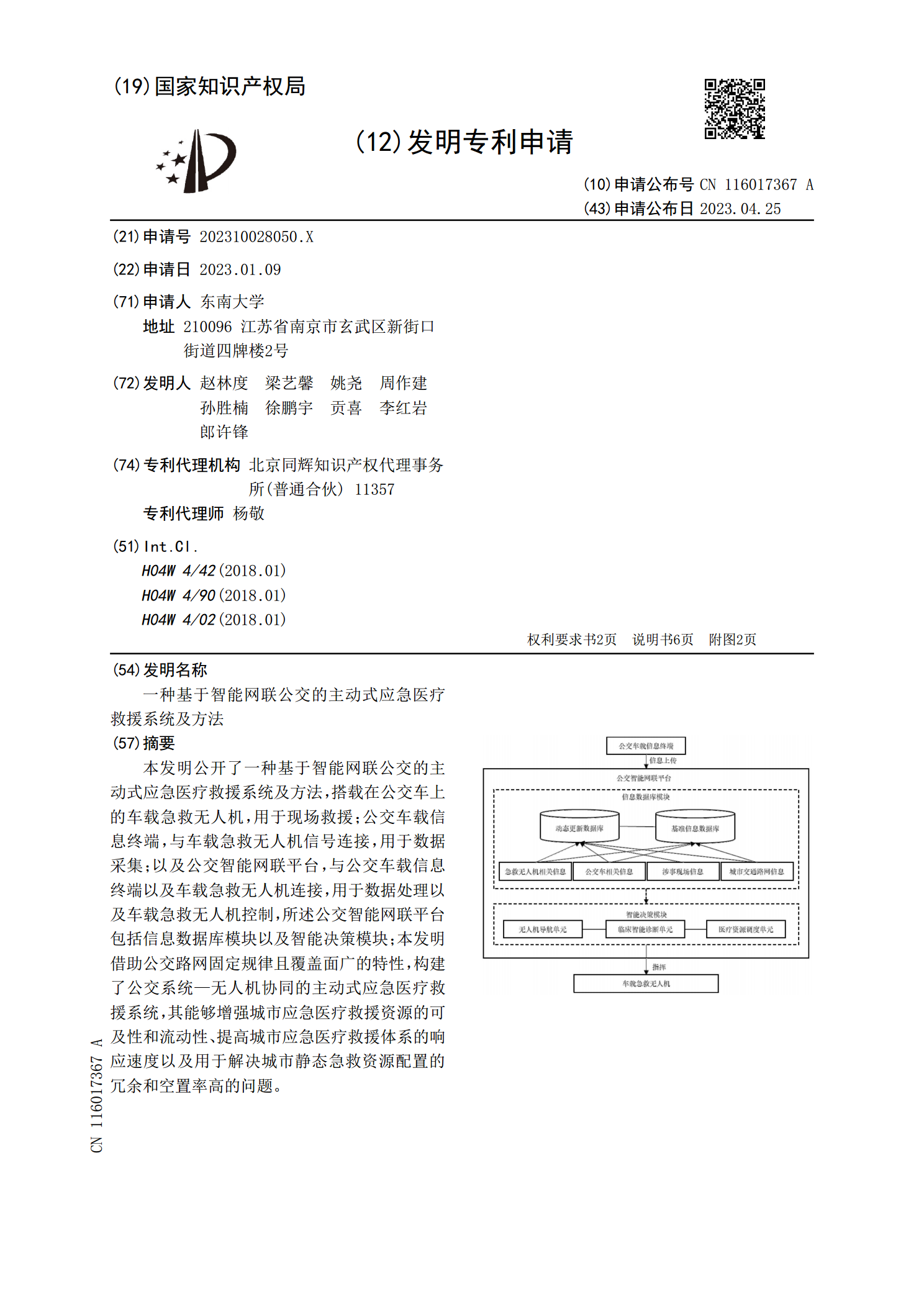
本发明公开了一种基于智能网联公交的主动式应急医疗救援系统及方法,搭载在公交车上的车载急救无人机,用于现场救援;公交车载信息终端,与车载急救无人机信号连接,用于数据采集;以及公交智能网联平台,与公交车载信息终端以及车载急救无人机连接,用于数据处理以及车载急救无人机控制,所述公交智能网联平台包括信息数据库模块以及智能决策模块;本发明借助公交路网固定规律且覆盖面广的特性,构建了公交系统—无人机协同的主动式应急医疗救援系统,其能够增强城市应急医疗救援资源的可及性和流动性、提高城市应急医疗救援体系的响应速度以及用于