
基于自主绕障的异构型多智能体网联协同调度规划方法.pdf

秀美****甜v


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于自主绕障的异构型多智能体网联协同调度规划方法.pdf
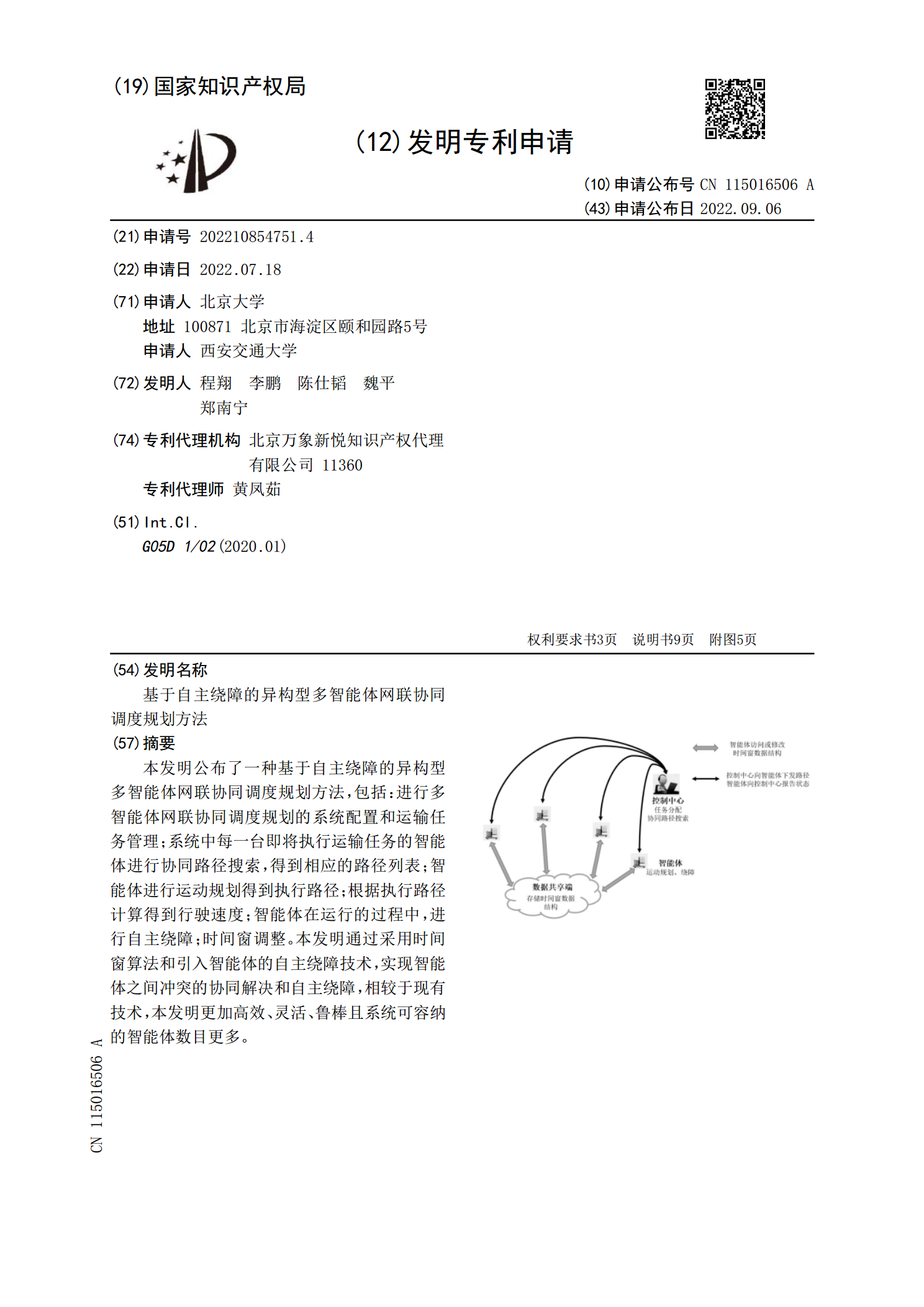
本发明公布了一种基于自主绕障的异构型多智能体网联协同调度规划方法,包括:进行多智能体网联协同调度规划的系统配置和运输任务管理;系统中每一台即将执行运输任务的智能体进行协同路径搜索,得到相应的路径列表;智能体进行运动规划得到执行路径;根据执行路径计算得到行驶速度;智能体在运行的过程中,进行自主绕障;时间窗调整。本发明通过采用时间窗算法和引入智能体的自主绕障技术,实现智能体之间冲突的协同解决和自主绕障,相较于现有技术,本发明更加高效、灵活、鲁棒且系统可容纳的智能体数目更多。
基于多智能体的生产调度方法与应用.pdf
武汉理工大学硕士学位论文基于多智能体的生产调度方法与应用姓名:戴涛申请学位级别:硕士专业:系统工程指导教师:罗荣桂20061101摘要建立了一套基于多个智能体系统的车间调度系统模型系统的智能化通过招标一多智能体技术是目前人工智能领域的研究热点它对解决具有空间分布特点的复杂问题有着独特的优势是一种具有重要研究意义和应用价值的方法。生产调度是控制与管理一体化的接合部向上要给企业经营战略决策层

一种基于超图匹配的多智能网联汽车协同目标跟踪方法.pdf
本发明公开了一种基于超图匹配的多智能网联汽车协同目标跟踪方法,主车和协同车分别利用车载传感器获取各自检测范围内目标的观测数据,并各自利用深度网络和滤波算法计算k时刻跟踪目标的外观特征与位置;协同车将其所跟踪目标位置、外观特征及协同车自身定位信息发送给主车,主车接收到协同车发送的信息,并计算协同车在主车坐标系中的相对位姿、协同车的跟踪目标在主车坐标系中的位置坐标;对主车跟踪的目标与协同车跟踪的目标分别构造超图并计算各超边的相似度;基于融合相似度,建立目标关联的超图匹配模型,将目标关联转化为求解超图匹配的最优

基于人工势场法的多智能体编队避障方法.docx
基于人工势场法的多智能体编队避障方法基于人工势场法的多智能体编队避障方法摘要:多智能体编队在无人系统领域起着重要的作用,并且随着技术的发展,越来越多的无人系统被用于各种应用场景中。然而,多智能体编队中的避障问题一直是一个挑战。本论文提出了一种基于人工势场法的多智能体编队避障方法,通过引入人工势场的概念来实现智能体之间的避障和编队控制。通过仿真实验验证了该方法的有效性和鲁棒性。关键词:多智能体编队,避障,人工势场法,控制,仿真实验1.引言多智能体编队是指协调多个无人系统进行协同工作,从而实现一定的任务目标。

基于多智能体的生产调度方法与应用的开题报告.docx
基于多智能体的生产调度方法与应用的开题报告一、研究背景和意义随着生产制造业工业化进程的加速,生产调度的复杂性逐渐增加。基于传统的单智能体生产调度方法已经无法满足生产调度中对高效、准确和稳定的要求。而基于多智能体的生产调度方法因为具有分布式、并行、自适应等特点,已经成为近年来国内外关注的研究热点之一。基于多智能体的生产调度方法,是指将多个智能体视为生产系统中的执行单元,采用协作和竞争的方式实现生产任务的调度、分配和优化。因为每个智能体在生产过程中拥有不同的知识、技能和任务执行能力,互相协作和竞争,能够有效地