
基于多特征匹配的多目标跟踪方法.pdf

一条****涛k


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于多特征匹配的多目标跟踪方法.pdf
一种基于多特征匹配的多目标跟踪算法,其步骤是:首先,针对量测点与目标关联时,匹配特征数量过少的问题,建立了所有目标的特征矩阵,特征矩阵包含了所有目标的检验统计量特征和多普勒频率特征;其次,在寻找最佳关联点时,将所有关联点的特征与目标的特征矩阵进行比对,找出与目标匹配度最高的关联点;最后,确定目标在当前跟踪时刻的运动状态估计值、检验统计量和多普勒频率特征,用于对目标在当前跟踪时刻之后运动状态的估计。本发明通过建立特征矩阵,并寻找与目标特征矩阵最匹配的关联点,解决了当多目标轨迹交叉重叠时目标轨迹跟踪不准确的问
一种基于区域的多特征匹配速滑运动员多目标跟踪方法.pdf
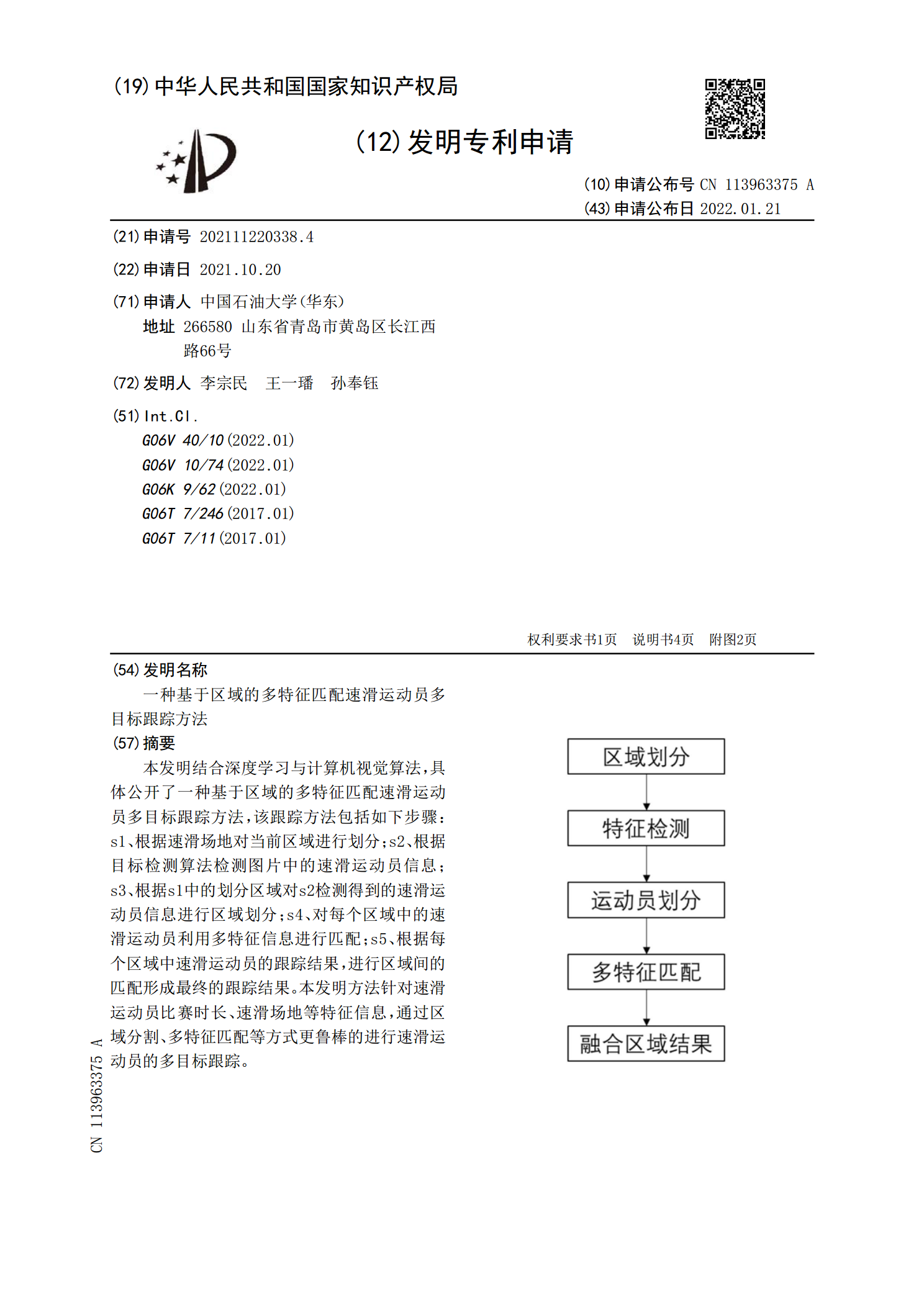
本发明结合深度学习与计算机视觉算法,具体公开了一种基于区域的多特征匹配速滑运动员多目标跟踪方法,该跟踪方法包括如下步骤:s1、根据速滑场地对当前区域进行划分;s2、根据目标检测算法检测图片中的速滑运动员信息;s3、根据s1中的划分区域对s2检测得到的速滑运动员信息进行区域划分;s4、对每个区域中的速滑运动员利用多特征信息进行匹配;s5、根据每个区域中速滑运动员的跟踪结果,进行区域间的匹配形成最终的跟踪结果。本发明方法针对速滑运动员比赛时长、速滑场地等特征信息,通过区域分割、多特征匹配等方式更鲁棒的进行速滑

基于ORB特征点匹配的多目标跟踪算法.docx
基于ORB特征点匹配的多目标跟踪算法基于ORB特征点匹配的多目标跟踪算法摘要:多目标跟踪是计算机视觉领域中的一个重要问题,它在许多应用中起到关键作用。本文提出了一种基于ORB特征点匹配的多目标跟踪算法,通过提取图像中的ORB特征点,并利用特征点之间的对应关系实现多目标的跟踪。该算法具有较高的准确性和实时性,并且适用于各种环境。关键词:多目标跟踪、ORB特征点匹配、准确性、实时性1.引言多目标跟踪是计算机视觉领域中的一个热门研究方向。它在许多应用中发挥着关键作用,比如视频监控、无人驾驶等。在多目标跟踪中,如
基于多特征联合与Mean Shift算法的多目标跟踪方法.pdf
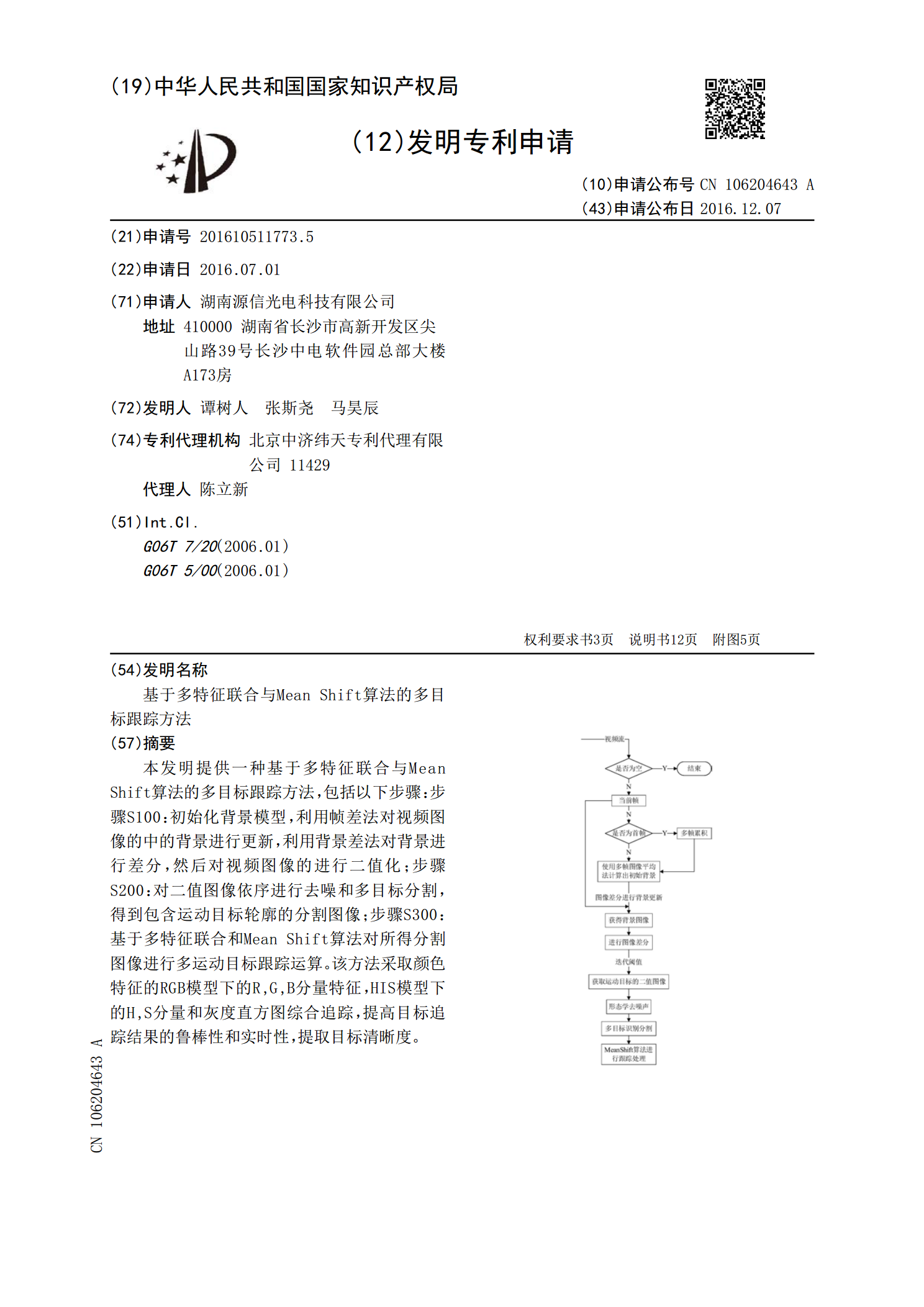
本发明提供一种基于多特征联合与MeanShift算法的多目标跟踪方法,包括以下步骤:步骤S100:初始化背景模型,利用帧差法对视频图像的中的背景进行更新,利用背景差法对背景进行差分,然后对视频图像的进行二值化;步骤S200:对二值图像依序进行去噪和多目标分割,得到包含运动目标轮廓的分割图像;步骤S300:基于多特征联合和MeanShift算法对所得分割图像进行多运动目标跟踪运算。该方法采取颜色特征的RGB模型下的R,G,B分量特征,HIS模型下的H,S分量和灰度直方图综合追踪,提高目标追踪结果的鲁棒性

基于多特征融合的多目标跟踪算法研究.pptx
汇报人:目录PARTONEPARTTWO算法定义和作用算法发展历程算法优缺点分析PARTTHREE特征融合的定义和作用特征融合的方法和流程特征融合的优势和挑战PARTFOUR目标检测技术目标跟踪技术数据关联技术运动预测技术PARTFIVE多特征融合在目标检测中的应用多特征融合在目标跟踪中的应用多特征融合在数据关联中的应用多特征融合在运动预测中的应用PARTSIX实验设置和数据集实验结果展示结果分析和比较性能评估和讨论PARTSEVEN研究成果总结未来研究方向和挑战THANKYOU