
一种编组列车停车控制方法和控制系统.pdf

努力****幻翠

1/10
2/10
3/10
4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种编组列车停车控制方法和控制系统.pdf
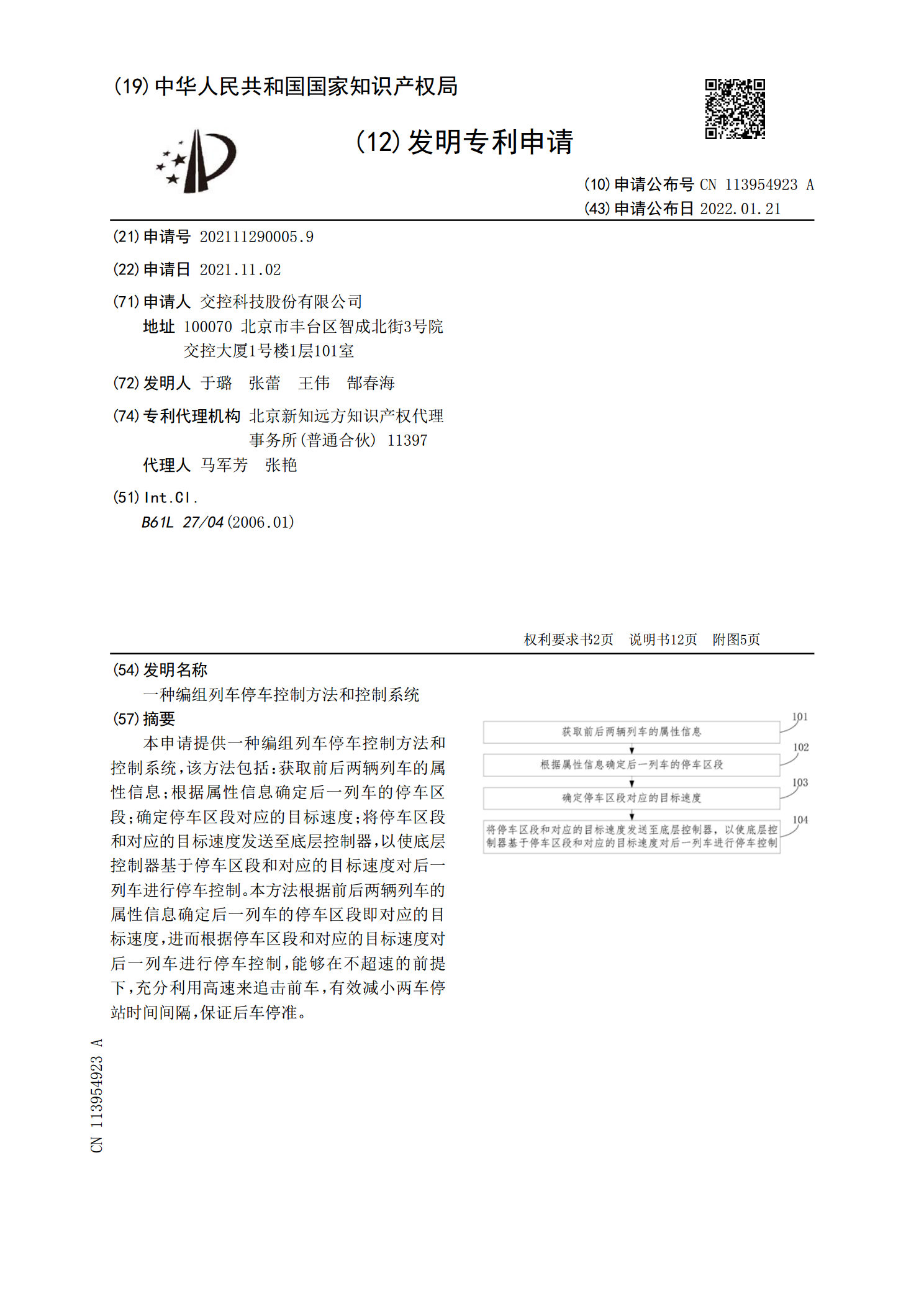
本申请提供一种编组列车停车控制方法和控制系统,该方法包括:获取前后两辆列车的属性信息;根据属性信息确定后一列车的停车区段;确定停车区段对应的目标速度;将停车区段和对应的目标速度发送至底层控制器,以使底层控制器基于停车区段和对应的目标速度对后一列车进行停车控制。本方法根据前后两辆列车的属性信息确定后一列车的停车区段即对应的目标速度,进而根据停车区段和对应的目标速度对后一列车进行停车控制,能够在不超速的前提下,充分利用高速来追击前车,有效减小两车停站时间间隔,保证后车停准。

一种列车缓解控制系统及控制方法.pdf
本发明公开了一种列车缓解控制系统及控制方法。该控制系统包括机车、车辆、监控仪和电空缓解控制装置。该控制方法中,监控仪把缓解指令发送给电空缓解控制装置,指令信息为缓解指令提取时间,电空缓解控制装置收到指令关断阀制动缸口与制动缸之间大通路,阀制动缸口与制动缸之间仅有一节流通路相同。电空缓解控制装置上预设一个延长时长,当检测时间等于缓解指令提取时间和延长时长之和时,电空缓解控制装置将阀制动缸口与制动缸之间连通,使制动缸的压缩空气可以通过制动阀快速排向大气。本发明的有益效果:通过监控仪和电空缓解控制装置组成同步缓
一种仿古游览列车的控制系统及控制方法.pdf
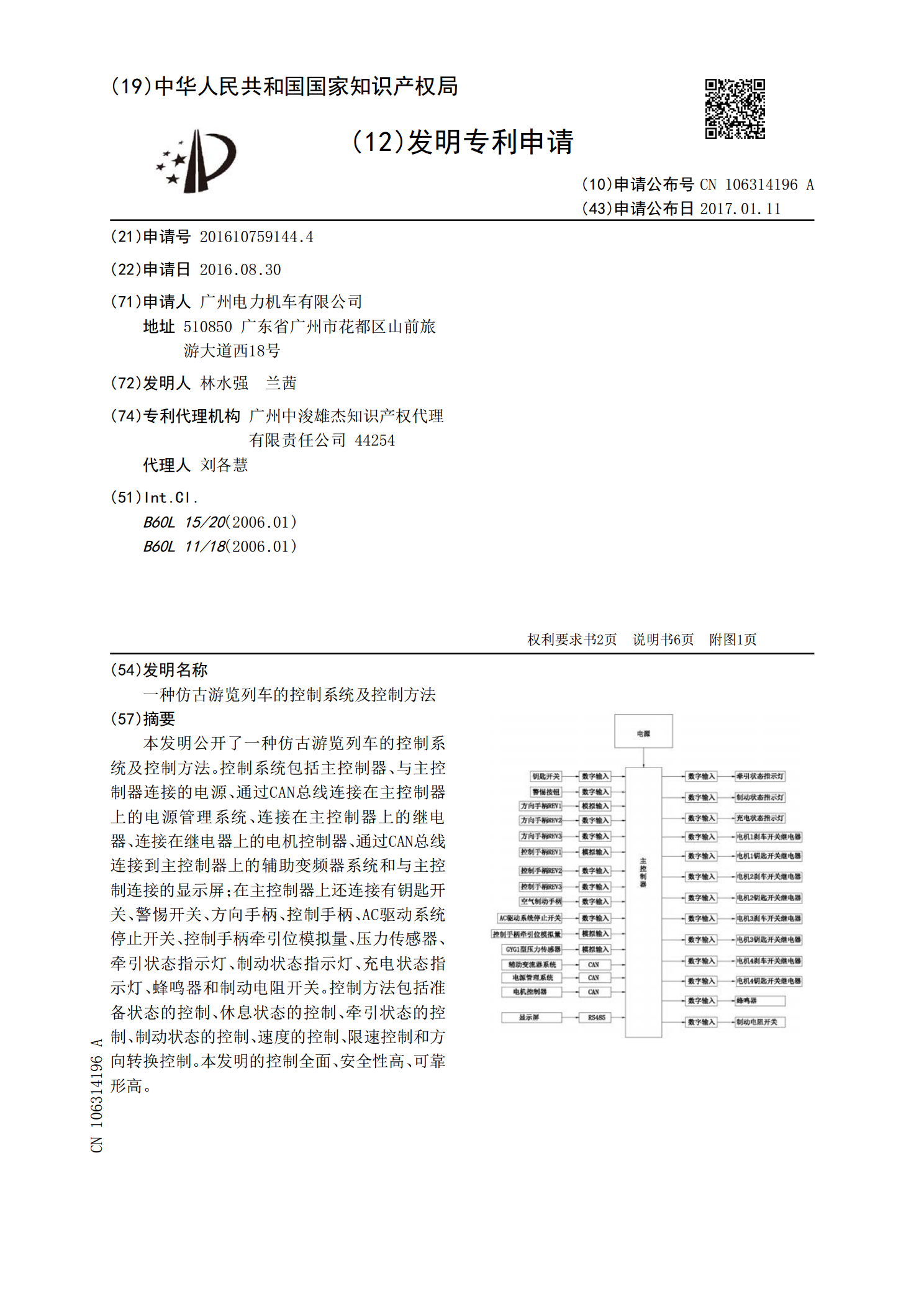
本发明公开了一种仿古游览列车的控制系统及控制方法。控制系统包括主控制器、与主控制器连接的电源、通过CAN总线连接在主控制器上的电源管理系统、连接在主控制器上的继电器、连接在继电器上的电机控制器、通过CAN总线连接到主控制器上的辅助变频器系统和与主控制连接的显示屏;在主控制器上还连接有钥匙开关、警惕开关、方向手柄、控制手柄、AC驱动系统停止开关、控制手柄牵引位模拟量、压力传感器、牵引状态指示灯、制动状态指示灯、充电状态指示灯、蜂鸣器和制动电阻开关。控制方法包括准备状态的控制、休息状态的控制、牵引状态的控制、

一种软停车控制系统以及软停车控制方法.pdf
本发明公开了一种软停车控制系统以及软停车控制方法,其中软停车控制系统,包括逻辑上相互关联的工作制动器控制电路、逻辑运行控制系统、安全回路、扶梯速度监控系统以及安全电路,其中:工作制动器控制电路中,工作制动器线圈、抱闸接触器常开触点以及电机接触器常开触点串联;逻辑运行控制系统中,抱闸接触器线圈以及电机接触器线圈并联接入并受控于逻辑控制器;安全电路中的安全继电器线圈串联接入安全回路,安全继电器常开触点串联接入电机接触器线圈;扶梯速度监控系统包括:速度信号采集电路以及接收速度信号并在溜车超速状态下断开安全继电器

基于以太网的灵活编组列车的网络控制系统研究.docx
基于以太网的灵活编组列车的网络控制系统研究基于以太网的灵活编组列车的网络控制系统研究摘要:随着城市化进程的加快和交通需求的持续增长,铁路运输系统的安全性、高效性和可靠性变得越来越重要。因此,如何实现列车之间的安全协同和运行优化成为了一个关键问题。本论文以基于以太网的灵活编组列车的网络控制系统为探索对象,深入研究了网络控制系统的架构和关键技术,并在实际场景中进行了验证。1.引言铁路运输系统拥有高度集中的路线和车辆管理,但面临的挑战是列车运行之间的协同和非标准化运行需求。传统的固定编组列车无法灵活应对不同运输