
双目摄像头标定方法、装置、计算机设备和存储介质.pdf

a是****澜吖

1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
双目摄像头标定方法、装置、计算机设备和存储介质.pdf
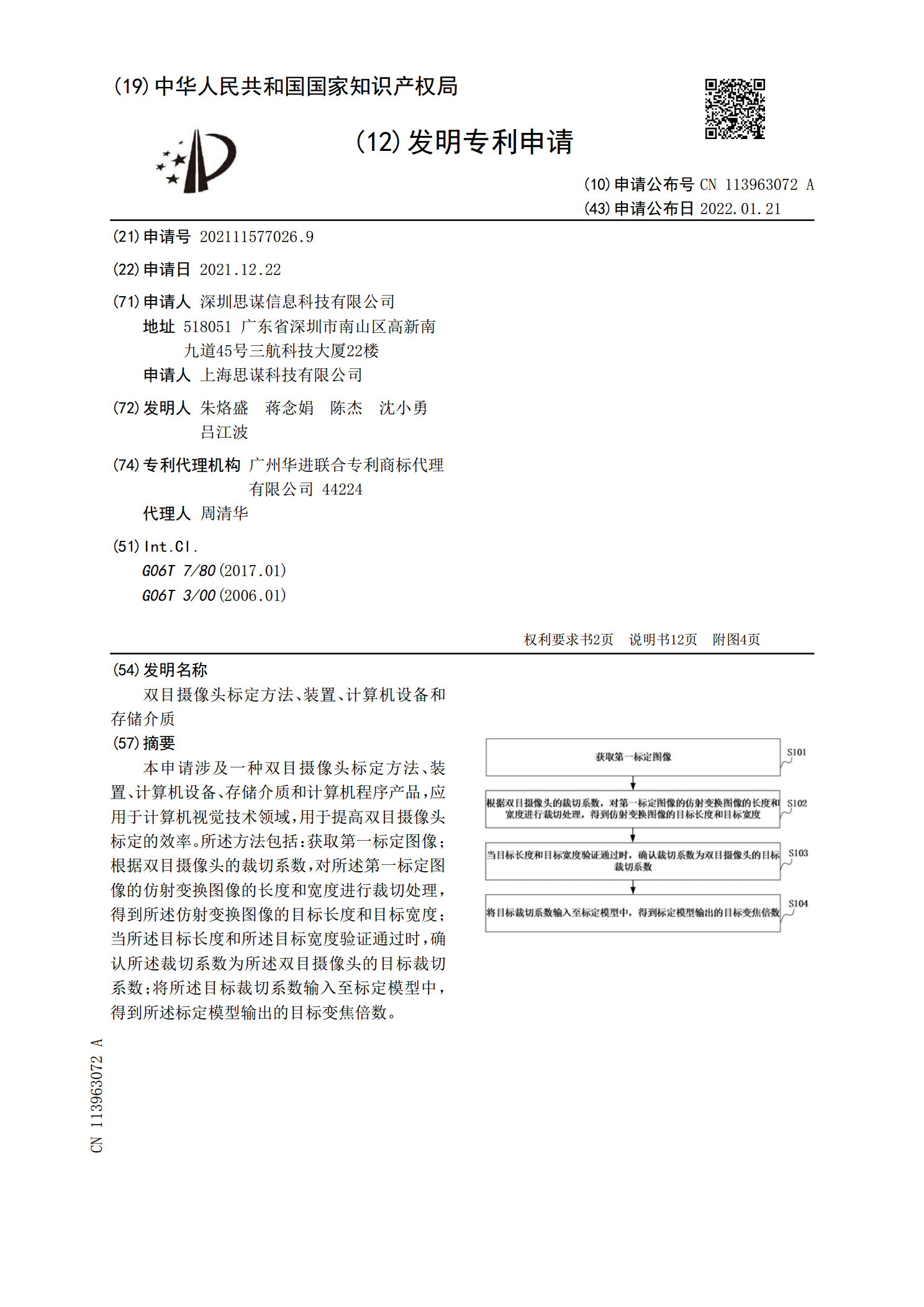
本申请涉及一种双目摄像头标定方法、装置、计算机设备、存储介质和计算机程序产品,应用于计算机视觉技术领域,用于提高双目摄像头标定的效率。所述方法包括:获取第一标定图像;根据双目摄像头的裁切系数,对所述第一标定图像的仿射变换图像的长度和宽度进行裁切处理,得到所述仿射变换图像的目标长度和目标宽度;当所述目标长度和所述目标宽度验证通过时,确认所述裁切系数为所述双目摄像头的目标裁切系数;将所述目标裁切系数输入至标定模型中,得到所述标定模型输出的目标变焦倍数。
车载摄像头标定方法、装置、设备及存储介质.pdf
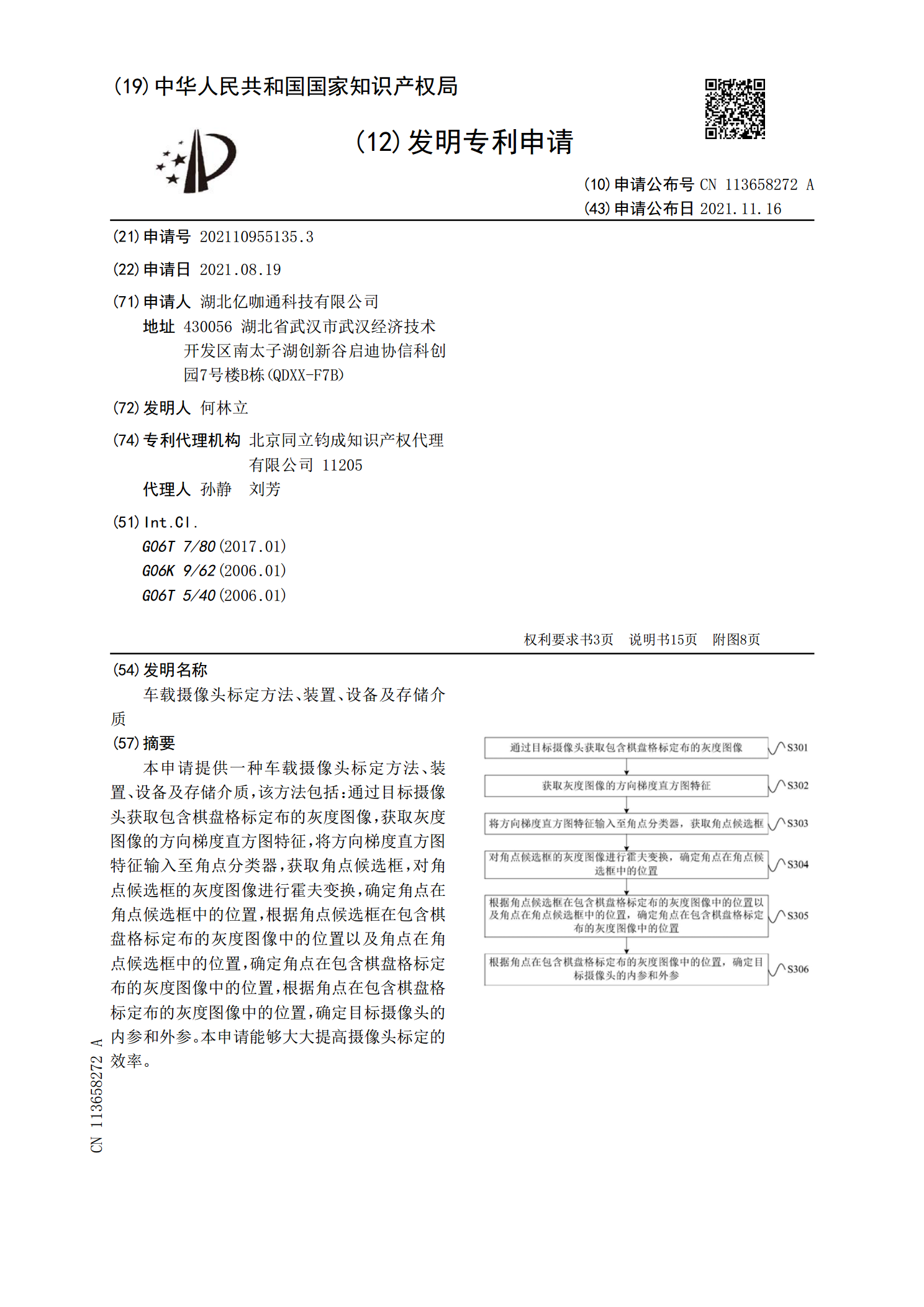
本申请提供一种车载摄像头标定方法、装置、设备及存储介质,该方法包括:通过目标摄像头获取包含棋盘格标定布的灰度图像,获取灰度图像的方向梯度直方图特征,将方向梯度直方图特征输入至角点分类器,获取角点候选框,对角点候选框的灰度图像进行霍夫变换,确定角点在角点候选框中的位置,根据角点候选框在包含棋盘格标定布的灰度图像中的位置以及角点在角点候选框中的位置,确定角点在包含棋盘格标定布的灰度图像中的位置,根据角点在包含棋盘格标定布的灰度图像中的位置,确定目标摄像头的内参和外参。本申请能够大大提高摄像头标定的效率。
双目鱼眼相机的参数标定方法、装置、设备及存储介质.pdf
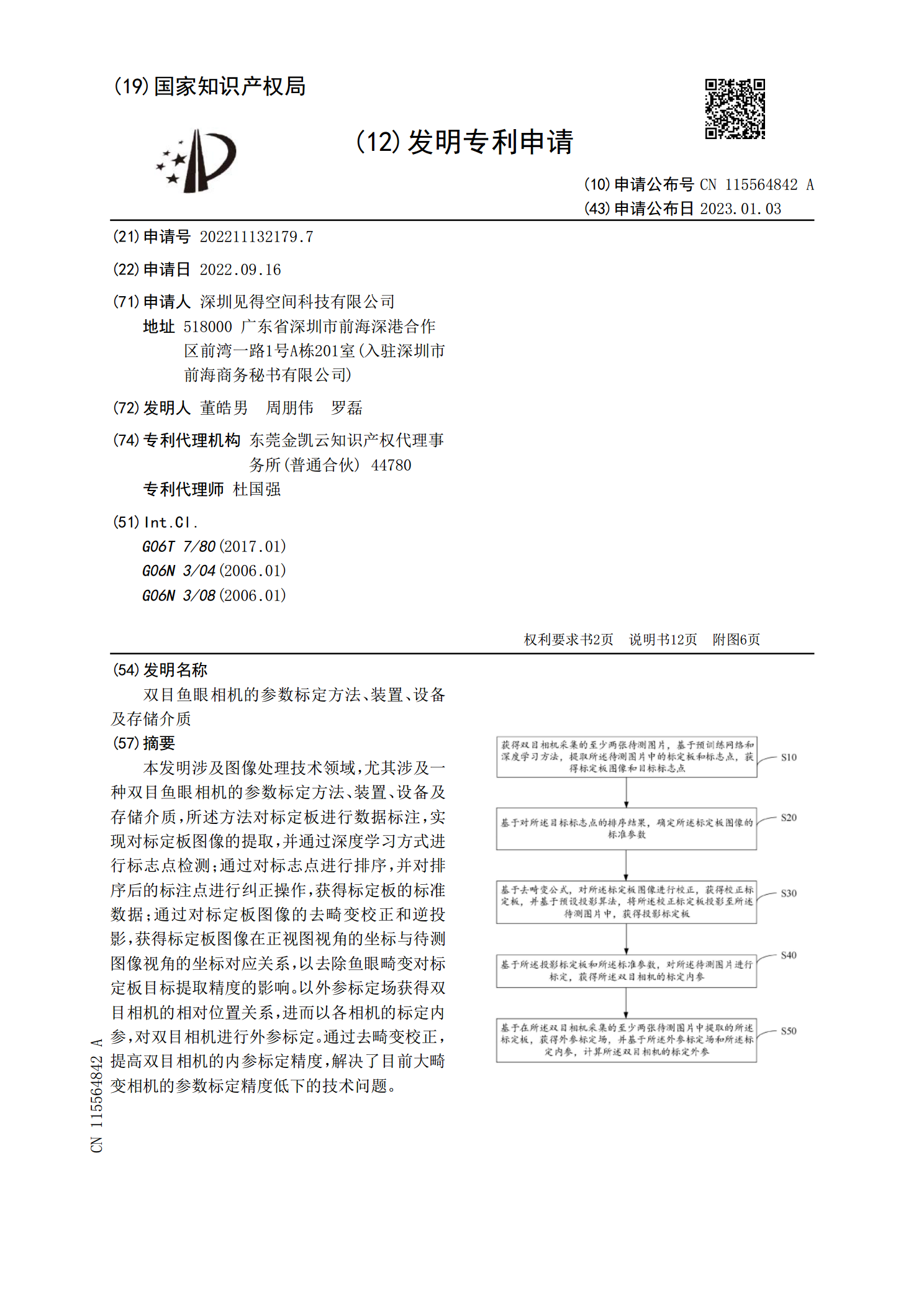
本发明涉及图像处理技术领域,尤其涉及一种双目鱼眼相机的参数标定方法、装置、设备及存储介质,所述方法对标定板进行数据标注,实现对标定板图像的提取,并通过深度学习方式进行标志点检测;通过对标志点进行排序,并对排序后的标注点进行纠正操作,获得标定板的标准数据;通过对标定板图像的去畸变校正和逆投影,获得标定板图像在正视图视角的坐标与待测图像视角的坐标对应关系,以去除鱼眼畸变对标定板目标提取精度的影响。以外参标定场获得双目相机的相对位置关系,进而以各相机的标定内参,对双目相机进行外参标定。通过去畸变校正,提高双目相
手眼标定方法、装置、计算机设备和存储介质.pdf
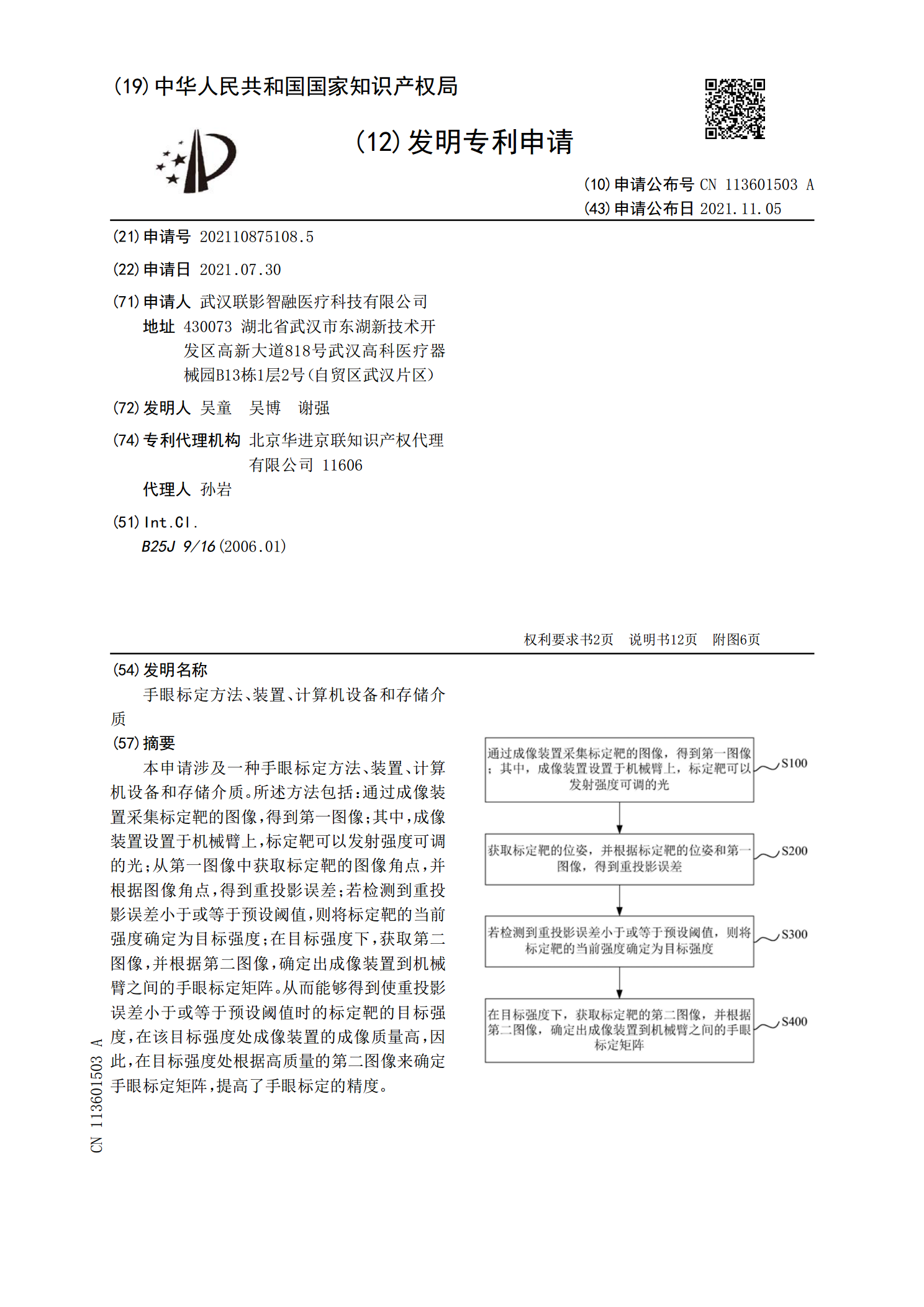
本申请涉及一种手眼标定方法、装置、计算机设备和存储介质。所述方法包括:通过成像装置采集标定靶的图像,得到第一图像;其中,成像装置设置于机械臂上,标定靶可以发射强度可调的光;从第一图像中获取标定靶的图像角点,并根据图像角点,得到重投影误差;若检测到重投影误差小于或等于预设阈值,则将标定靶的当前强度确定为目标强度;在目标强度下,获取第二图像,并根据第二图像,确定出成像装置到机械臂之间的手眼标定矩阵。从而能够得到使重投影误差小于或等于预设阈值时的标定靶的目标强度,在该目标强度处成像装置的成像质量高,因此,在目标
基于双目摄像头的人脸识别方法、装置和存储介质.pdf
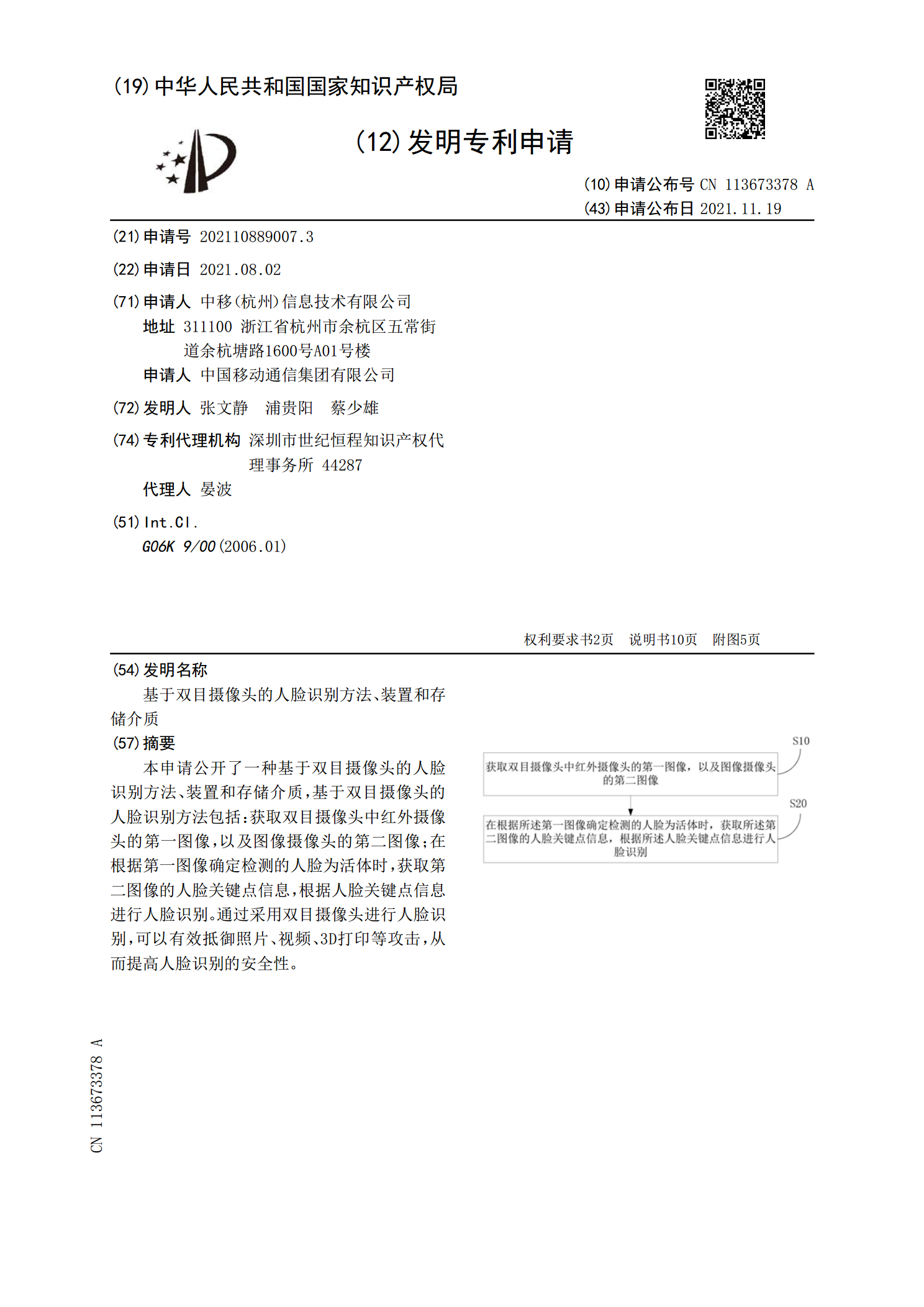
本申请公开了一种基于双目摄像头的人脸识别方法、装置和存储介质,基于双目摄像头的人脸识别方法包括:获取双目摄像头中红外摄像头的第一图像,以及图像摄像头的第二图像;在根据第一图像确定检测的人脸为活体时,获取第二图像的人脸关键点信息,根据人脸关键点信息进行人脸识别。通过采用双目摄像头进行人脸识别,可以有效抵御照片、视频、3D打印等攻击,从而提高人脸识别的安全性。