
手眼标定方法、装置、计算机设备和存储介质.pdf

莉娜****ua


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
手眼标定方法、装置、计算机设备和存储介质.pdf
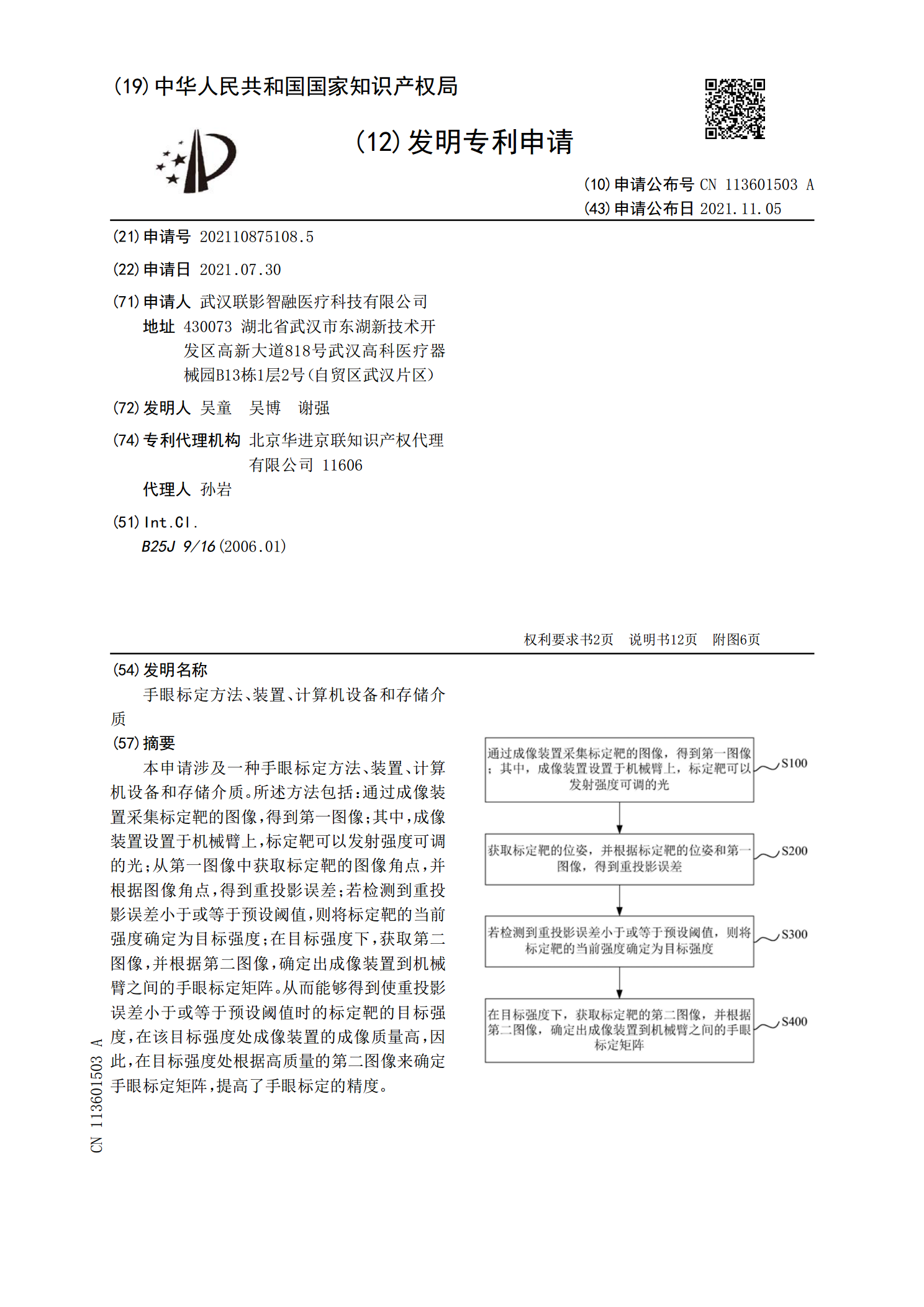
本申请涉及一种手眼标定方法、装置、计算机设备和存储介质。所述方法包括:通过成像装置采集标定靶的图像,得到第一图像;其中,成像装置设置于机械臂上,标定靶可以发射强度可调的光;从第一图像中获取标定靶的图像角点,并根据图像角点,得到重投影误差;若检测到重投影误差小于或等于预设阈值,则将标定靶的当前强度确定为目标强度;在目标强度下,获取第二图像,并根据第二图像,确定出成像装置到机械臂之间的手眼标定矩阵。从而能够得到使重投影误差小于或等于预设阈值时的标定靶的目标强度,在该目标强度处成像装置的成像质量高,因此,在目标
手眼标定方法、装置、电子设备和计算机可读存储介质.pdf
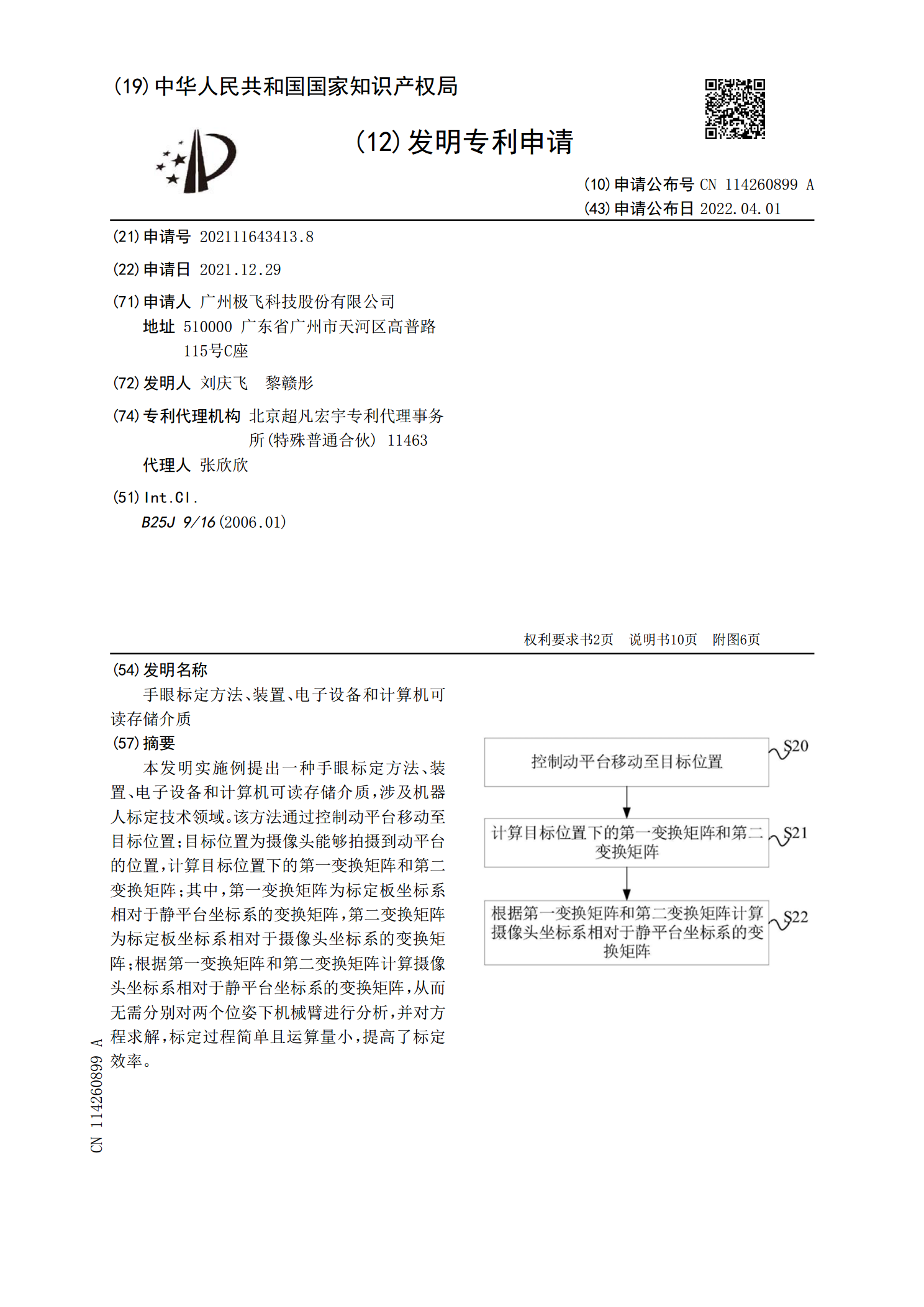
本发明实施例提出一种手眼标定方法、装置、电子设备和计算机可读存储介质,涉及机器人标定技术领域。该方法通过控制动平台移动至目标位置;目标位置为摄像头能够拍摄到动平台的位置,计算目标位置下的第一变换矩阵和第二变换矩阵;其中,第一变换矩阵为标定板坐标系相对于静平台坐标系的变换矩阵,第二变换矩阵为标定板坐标系相对于摄像头坐标系的变换矩阵;根据第一变换矩阵和第二变换矩阵计算摄像头坐标系相对于静平台坐标系的变换矩阵,从而无需分别对两个位姿下机械臂进行分析,并对方程求解,标定过程简单且运算量小,提高了标定效率。
基站标定方法和装置、计算机设备以及存储介质.pdf
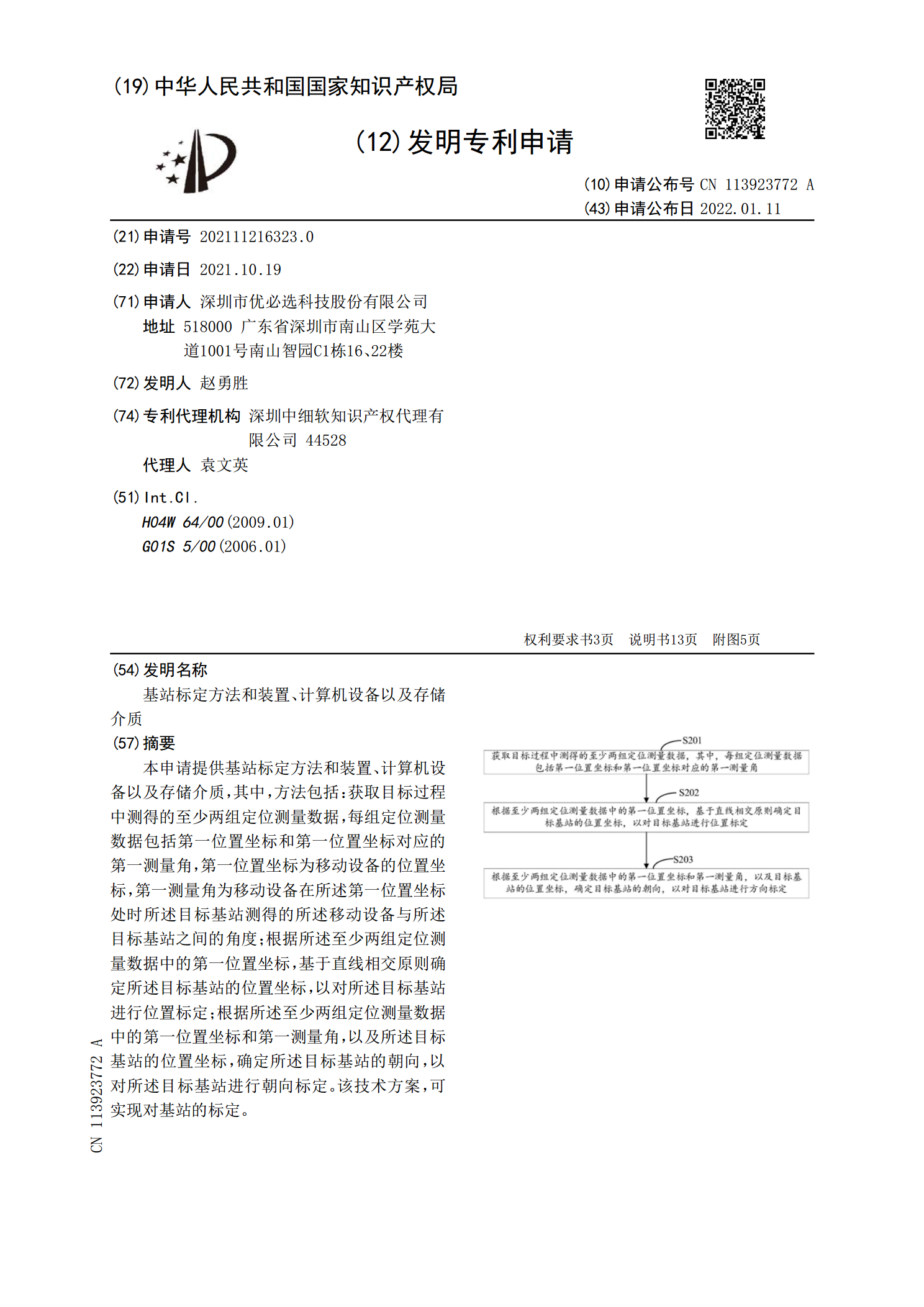
本申请提供基站标定方法和装置、计算机设备以及存储介质,其中,方法包括:获取目标过程中测得的至少两组定位测量数据,每组定位测量数据包括第一位置坐标和第一位置坐标对应的第一测量角,第一位置坐标为移动设备的位置坐标,第一测量角为移动设备在所述第一位置坐标处时所述目标基站测得的所述移动设备与所述目标基站之间的角度;根据所述至少两组定位测量数据中的第一位置坐标,基于直线相交原则确定所述目标基站的位置坐标,以对所述目标基站进行位置标定;根据所述至少两组定位测量数据中的第一位置坐标和第一测量角,以及所述目标基站的位置坐
图像校正标定方法、装置、计算机设备和存储介质.pdf
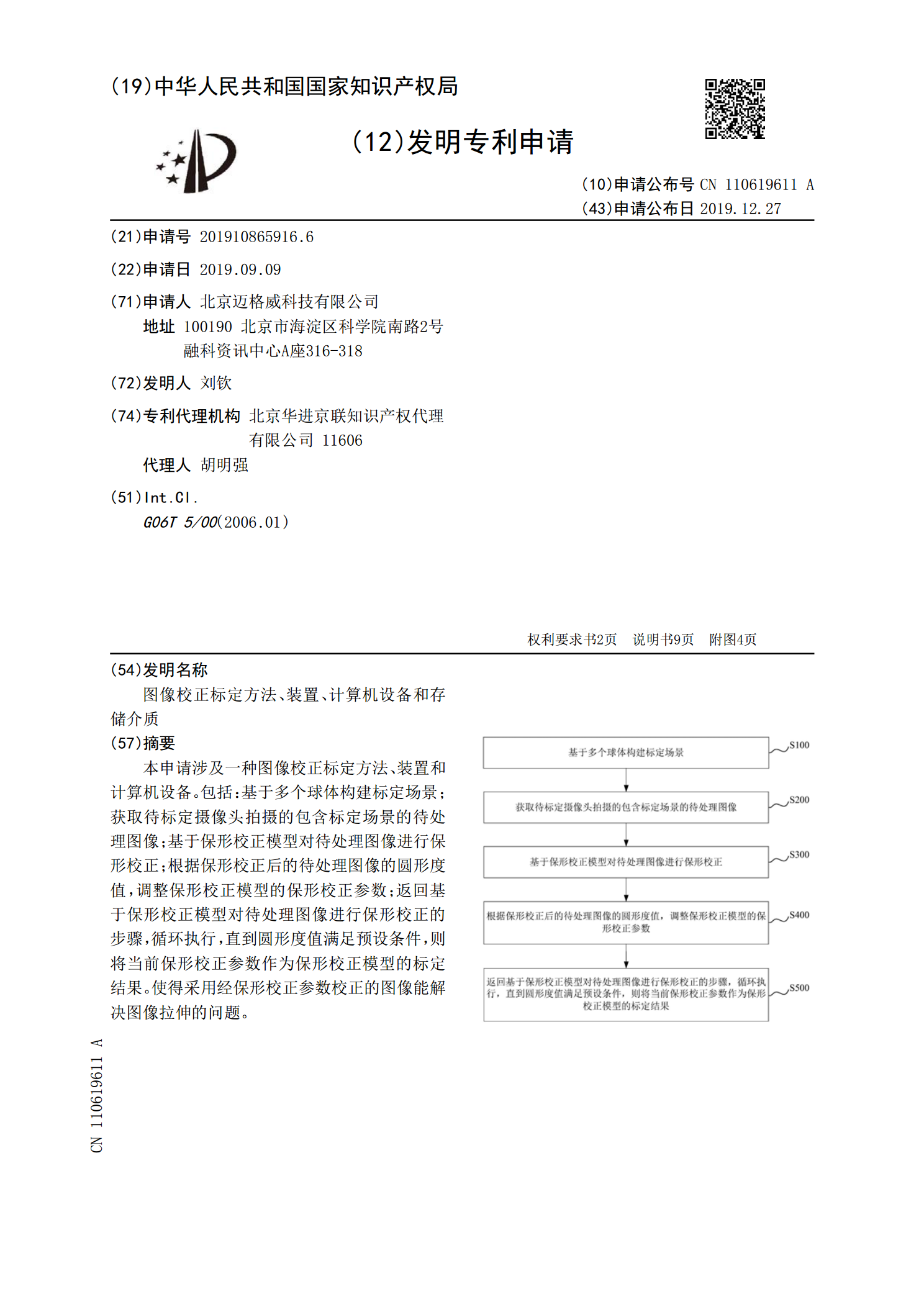
本申请涉及一种图像校正标定方法、装置和计算机设备。包括:基于多个球体构建标定场景;获取待标定摄像头拍摄的包含标定场景的待处理图像;基于保形校正模型对待处理图像进行保形校正;根据保形校正后的待处理图像的圆形度值,调整保形校正模型的保形校正参数;返回基于保形校正模型对待处理图像进行保形校正的步骤,循环执行,直到圆形度值满足预设条件,则将当前保形校正参数作为保形校正模型的标定结果。使得采用经保形校正参数校正的图像能解决图像拉伸的问题。

光轴中心标定方法、装置、计算机设备和存储介质.pdf
本申请涉及一种光轴中心标定方法、装置、计算机设备和存储介质。所述方法包括:获取图像传感器所采集的待处理图像;将所述待处理图像转换为灰度图像;获取所述灰度图像中相互垂直的两条待测线条上的亮度值;根据所获取的亮度值计算每一条待测线条上的最大亮度值,并将所述最大亮度值所对应的坐标作为对应方向上的目标坐标;根据所述目标坐标得到目标光轴中心所在的位置。采用本方法能够减少数据处理,提高光轴中心标定准确性。