
用于自动路线导航的系统和方法.pdf

一只****爱敏


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于自动路线导航的系统和方法.pdf
本公开的实施例涉及用于自动路线导航的系统和方法。公开了用于自动车道级导航的系统和方法。在一个方面中,一种用于自动车辆的控制系统包括处理器和计算机可读存储器,该计算机可读存储器被配置为使该处理器接收限定多个车道段的局部高清晰度(HD)地图,该多个车道段一起表示道路的一个或多个车道,局部HD地图至少包括当前车道段。处理器还被配置为针对局部HD地图中的车道段中的每个车道段生成辅助全局信息。处理器还被配置为使用局部HD地图和辅助全局信息生成包括当前车道段与目的地车道段之间的多个可能路线的子图,基于辅助全局信息来选
用于自动驾驶车辆的导航路线规划方法.pdf
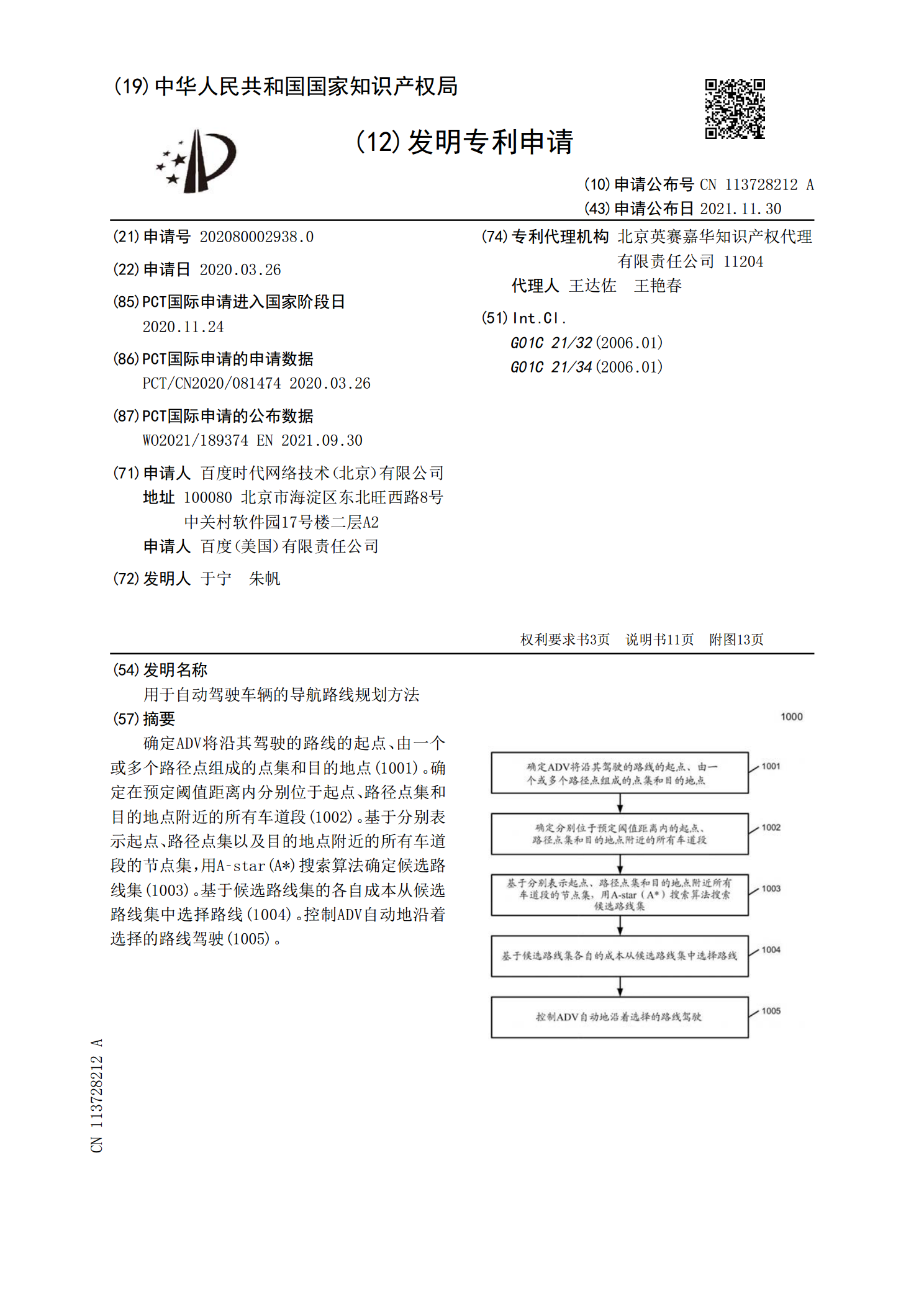
确定ADV将沿其驾驶的路线的起点、由一个或多个路径点组成的点集和目的地点(1001)。确定在预定阈值距离内分别位于起点、路径点集和目的地点附近的所有车道段(1002)。基于分别表示起点、路径点集以及目的地点附近的所有车道段的节点集,用A‑star(A*)搜索算法确定候选路线集(1003)。基于候选路线集的各自成本从候选路线集中选择路线(1004)。控制ADV自动地沿着选择的路线驾驶(1005)。

路线计算系统、导航装置和路线计算方法.pdf
路线计算系统包括:计算各路线的路线选择概率计算部;获取至少表示路线移动距离和路线移动时间分别对路线选择概率的影响度的至少2种权重参数的权重参数获取部;选择与出发地和目的地的组合对应的1组起点终点组合所关联的至少2种权重参数的权重参数选择部;基于包括链路移动距离和链路移动时间的至少2种链路成本和与1组起点终点组合对应的至少2种权重参数来计算推荐路线的推荐路线计算部。

用于水柱辅助导航的系统和方法.pdf
水下航行器在水面时可以通过GPS确定它们的位置,一旦其已经下降到水体底部的追踪范围,就使用水底追踪来进行航位推算。本公开描述了一种当GPS不可用时,使用来自包括声学多普勒流速剖面仪(ADCP)的声纳系统的流速分布,通过深度在水中导航的方法和系统。这种对以大地为基准的流速分布的推断可以提供一种在航行器到达水底之前估计航行器在水下的运动的方法。一旦实现水底追踪,航行器运动的校正基准就改进航行器的位置估计。在航行器下降期间,卡尔曼滤波器更新航行器的位置和流速分布估计,并且当航行器的底部位于水底追踪的范围之内时进

用于在肺内部导航的系统和方法.pdf
公开了通过患者气管树导航至目标的方法和系统,所述系统包括:支气管镜;探针,所述探针能够插入到支气管镜的工作通道中并且包括位置传感器;和工作站,其与探针和支气管镜操作通信,所述工作站包括用户界面,所述用户界面引导用户通道导航规划并且构造成呈现:中央导航视图,所述中央导航视图包括多张视图,所述多张视图构造成辅助用户将支气管镜朝向目标导航通过患者支气管树的中央气道;周边导航视图,所述周边导航视图包括多张视图,其构造成用于辅助用户将探针通过患者支气管树的周边气道导航至所述目标;和目标对准视图,其包括多张视图,所述