
一种基于多视角双目结构光的水下三维重建方法.pdf

桂香****盟主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多视角双目结构光的水下三维重建方法.pdf
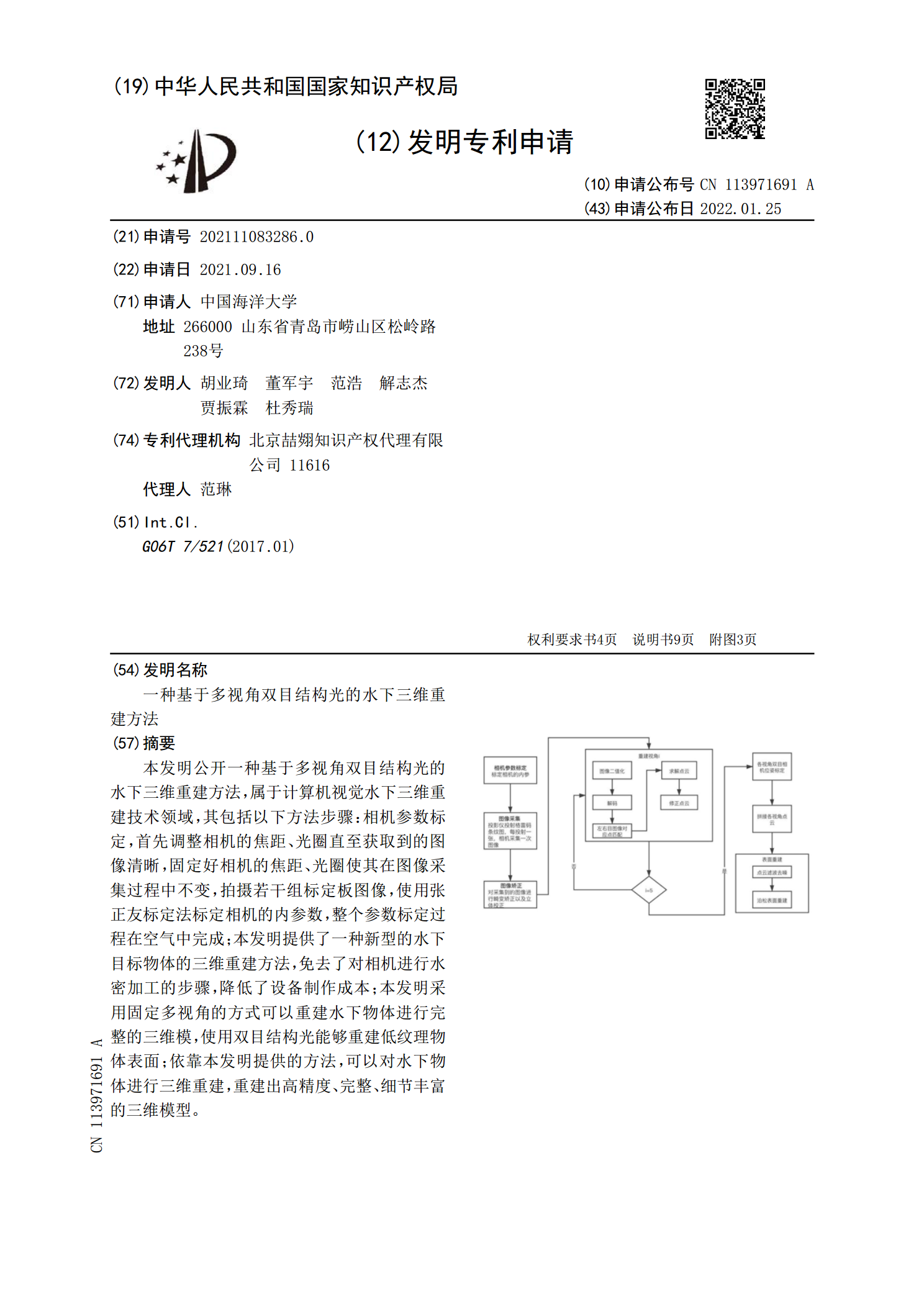
本发明公开一种基于多视角双目结构光的水下三维重建方法,属于计算机视觉水下三维重建技术领域,其包括以下方法步骤:相机参数标定,首先调整相机的焦距、光圈直至获取到的图像清晰,固定好相机的焦距、光圈使其在图像采集过程中不变,拍摄若干组标定板图像,使用张正友标定法标定相机的内参数,整个参数标定过程在空气中完成;本发明提供了一种新型的水下目标物体的三维重建方法,免去了对相机进行水密加工的步骤,降低了设备制作成本;本发明采用固定多视角的方式可以重建水下物体进行完整的三维模,使用双目结构光能够重建低纹理物体表面;依靠本
一种基于虚拟双目的条纹结构光三维重建方法.pdf
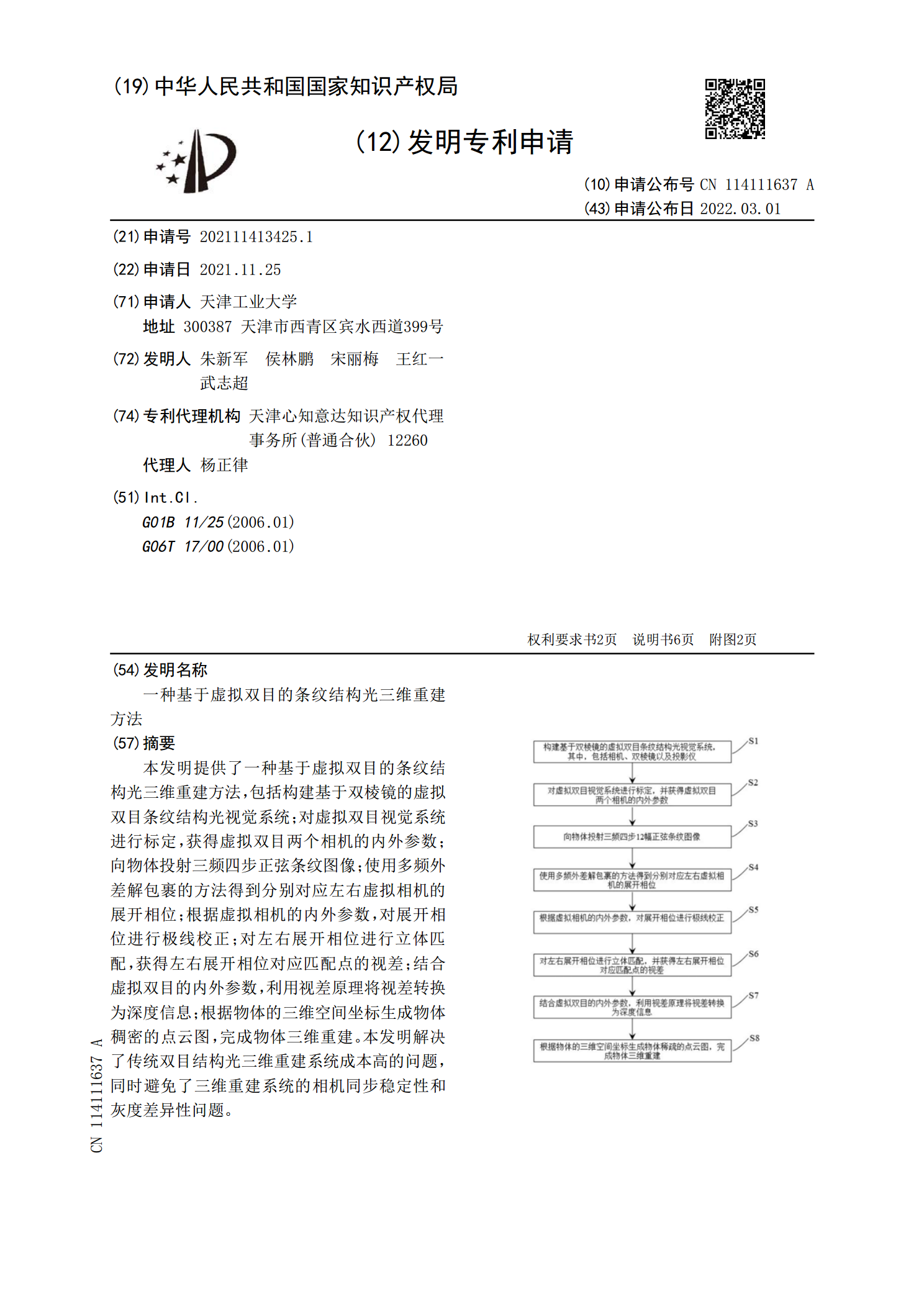
本发明提供了一种基于虚拟双目的条纹结构光三维重建方法,包括构建基于双棱镜的虚拟双目条纹结构光视觉系统;对虚拟双目视觉系统进行标定,获得虚拟双目两个相机的内外参数;向物体投射三频四步正弦条纹图像;使用多频外差解包裹的方法得到分别对应左右虚拟相机的展开相位;根据虚拟相机的内外参数,对展开相位进行极线校正;对左右展开相位进行立体匹配,获得左右展开相位对应匹配点的视差;结合虚拟双目的内外参数,利用视差原理将视差转换为深度信息;根据物体的三维空间坐标生成物体稠密的点云图,完成物体三维重建。本发明解决了传统双目结构光

基于双目结构光的工件点云构建与多视角配准方法研究的开题报告.docx
基于双目结构光的工件点云构建与多视角配准方法研究的开题报告一、选题背景和意义在工件质量检测、三维重构和自动化生产中,点云构建和多视角配准技术很重要。传统的三维扫描技术受到许多限制,如成像速度、颜色还原和可见性问题等。双目结构光成像技术结合多视角配准算法是一种有效的解决方案,可以提高三维成像质量,增加成像速度,实现更高效的3D模型重建。本课题的主要研究内容是基于双目结构光的工件点云构建与多视角配准方法,旨在解决电子制造和汽车工业中出现的几何误差检测、尺寸检测和装配问题等。二、研究内容和思路1.双目结构光算法
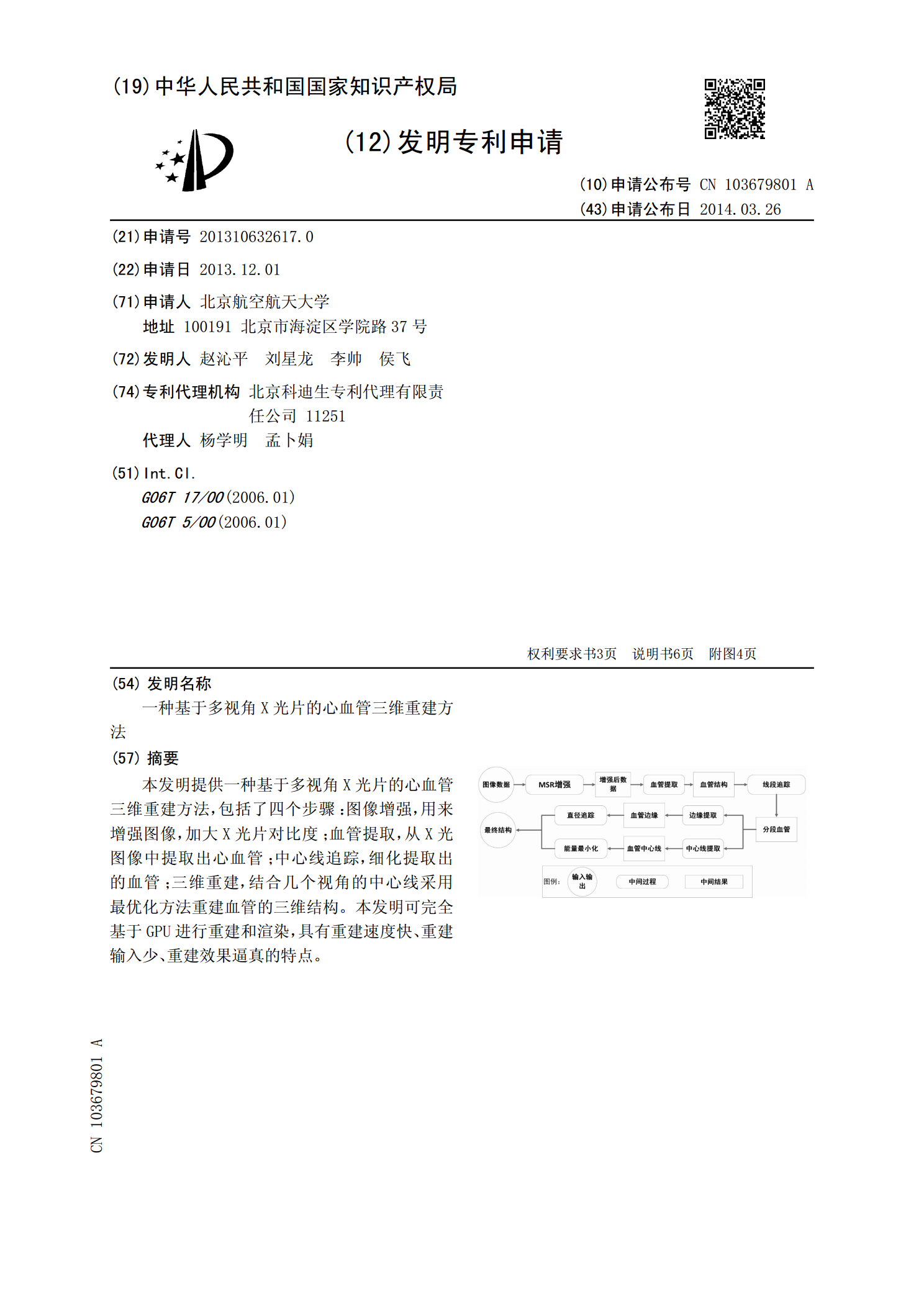
一种基于多视角X光片的心血管三维重建方法.pdf
本发明提供一种基于多视角X光片的心血管三维重建方法,包括了四个步骤:图像增强,用来增强图像,加大X光片对比度;血管提取,从X光图像中提取出心血管;中心线追踪,细化提取出的血管;三维重建,结合几个视角的中心线采用最优化方法重建血管的三维结构。本发明可完全基于GPU进行重建和渲染,具有重建速度快、重建输入少、重建效果逼真的特点。

基于平行双目视觉的水下环境三维重建方法研究的中期报告.docx
基于平行双目视觉的水下环境三维重建方法研究的中期报告报告摘要:水下环境三维重建是现今海洋工程领域的一个重要研究方向。本研究基于平行双目视觉技术进行水下环境三维重建,旨在解决传统水下遥感数据获取存在的较大问题,提高水下环境的数字化、可视化水平。本中期报告主要介绍了本研究现阶段的研究进展和方法实现。报告内容:1.前期研究分析通过对水下环境三维重建的前期研究进行分析,我们发现传统水下遥感数据获取存在许多问题,例如数据噪声大、不足以获得足够的细节信息等。因此,我们采用平行双目视觉技术进行重建。2.数据获取我们选取