
基于双目结构光的工件点云构建与多视角配准方法研究的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于双目结构光的工件点云构建与多视角配准方法研究的开题报告.docx
基于双目结构光的工件点云构建与多视角配准方法研究的开题报告一、选题背景和意义在工件质量检测、三维重构和自动化生产中,点云构建和多视角配准技术很重要。传统的三维扫描技术受到许多限制,如成像速度、颜色还原和可见性问题等。双目结构光成像技术结合多视角配准算法是一种有效的解决方案,可以提高三维成像质量,增加成像速度,实现更高效的3D模型重建。本课题的主要研究内容是基于双目结构光的工件点云构建与多视角配准方法,旨在解决电子制造和汽车工业中出现的几何误差检测、尺寸检测和装配问题等。二、研究内容和思路1.双目结构光算法
基于非线性优化的多视角点云配准方法及系统.pdf
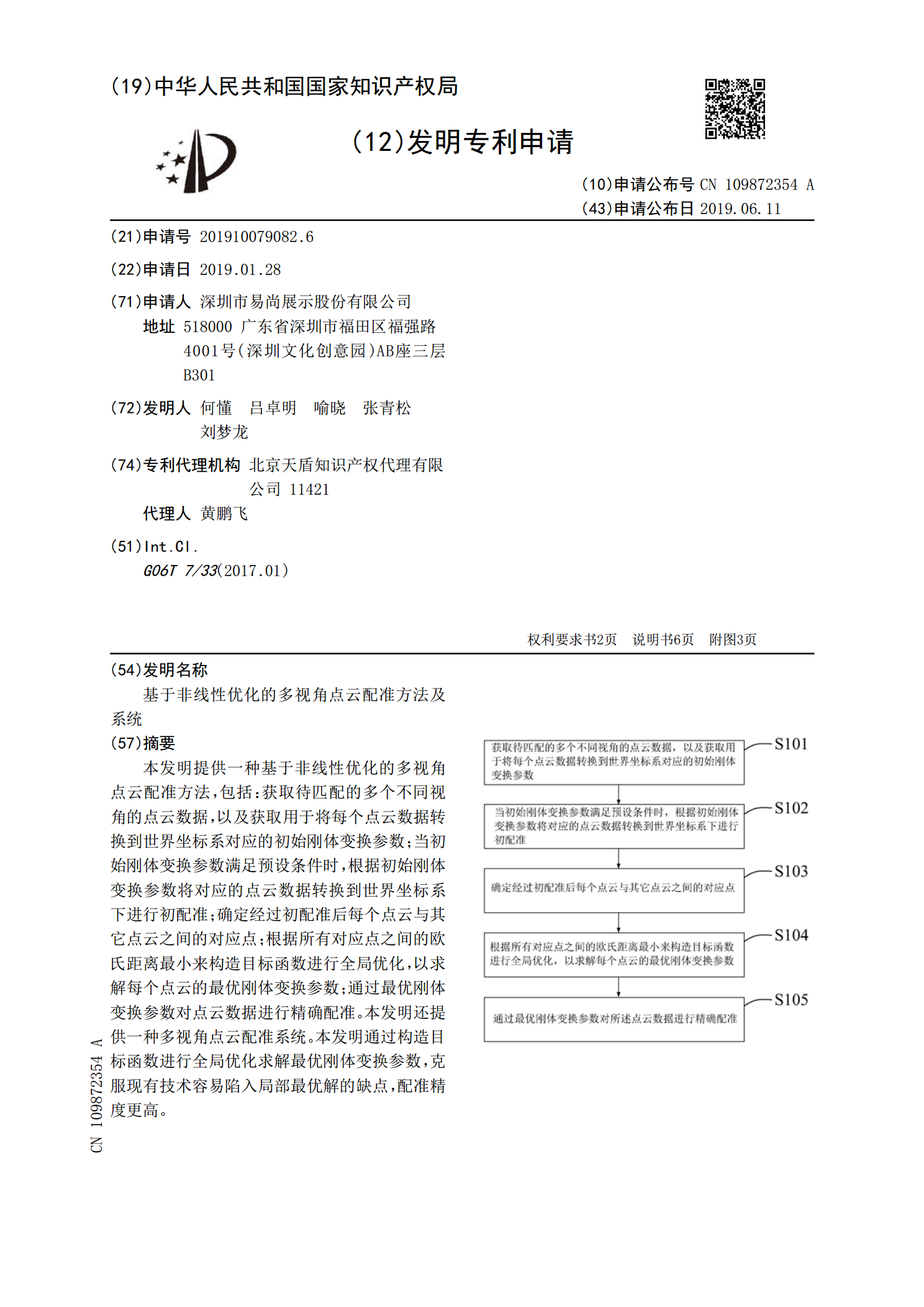
本发明提供一种基于非线性优化的多视角点云配准方法,包括:获取待匹配的多个不同视角的点云数据,以及获取用于将每个点云数据转换到世界坐标系对应的初始刚体变换参数;当初始刚体变换参数满足预设条件时,根据初始刚体变换参数将对应的点云数据转换到世界坐标系下进行初配准;确定经过初配准后每个点云与其它点云之间的对应点;根据所有对应点之间的欧氏距离最小来构造目标函数进行全局优化,以求解每个点云的最优刚体变换参数;通过最优刚体变换参数对点云数据进行精确配准。本发明还提供一种多视角点云配准系统。本发明通过构造目标函数进行全局

基于位姿参数估计的多视角点云配准方法.docx
基于位姿参数估计的多视角点云配准方法1.内容概要本文提出了一种基于位姿参数估计的多视角点云配准方法,旨在解决多视角图像在三维重建过程中可能出现的位姿一致性问题。该方法首先根据输入的多视角点云数据和相机标定信息,估计出每个相机的位姿参数。通过最小二乘法计算各个相机之间的位姿误差,并利用RANSAC算法去除异常值。根据得到的位姿参数对点云数据进行配准,从而实现多视角点云数据的融合。实验结果表明,该方法在处理具有不同姿态和尺度的多视角点云数据时具有较好的性能。1.1研究背景随着计算机视觉、机器人技术和虚拟现实等

基于激光雷达点云数据的配准方法研究的开题报告.docx
基于激光雷达点云数据的配准方法研究的开题报告一、选题背景随着激光雷达技术的发展,其在三维地图制作、智能交通、机器人导航等领域得到了广泛的应用。在这些应用中,激光雷达点云数据的处理和配准是非常重要的。在实际场景中,由于各种原因,不同时刻采集的点云数据存在姿态差异和噪声,需要将它们进行精确的配准,以获得更完整、准确的地图和场景信息。二、研究目的和意义传统的点云配准方法主要基于特征匹配,但存在误匹配、特征不稳定等问题。因此,研究基于点云数据自身特征的配准方法具有重要的实际意义。本文旨在研究基于激光雷达点云数据自

基于深度学习的三维点云配准方法研究的开题报告.docx
基于深度学习的三维点云配准方法研究的开题报告一、选题背景点云是三维信息的一种表示方式,它是由大量离散点所组成的、在三维空间中呈现出复杂物体表面的形状、大小、颜色等信息的数据形式,可以广泛应用于机器人、虚拟现实、地形测绘等领域。在点云应用中,点云配准是至关重要的一步。点云配准旨在将两个点云对齐,计算实现点云间的变换关系。对于不同位置、姿态的点云,精确的配准是保证后续处理精度的关键。传统的基于特征点匹配的点云配准算法在一定程度上依赖于特征点的选取以及特征点匹配的准确性,难以满足实际应用的需求。基于深度学习的点