
一种基于虚拟双目的条纹结构光三维重建方法.pdf

书生****35

1/10

2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于虚拟双目的条纹结构光三维重建方法.pdf
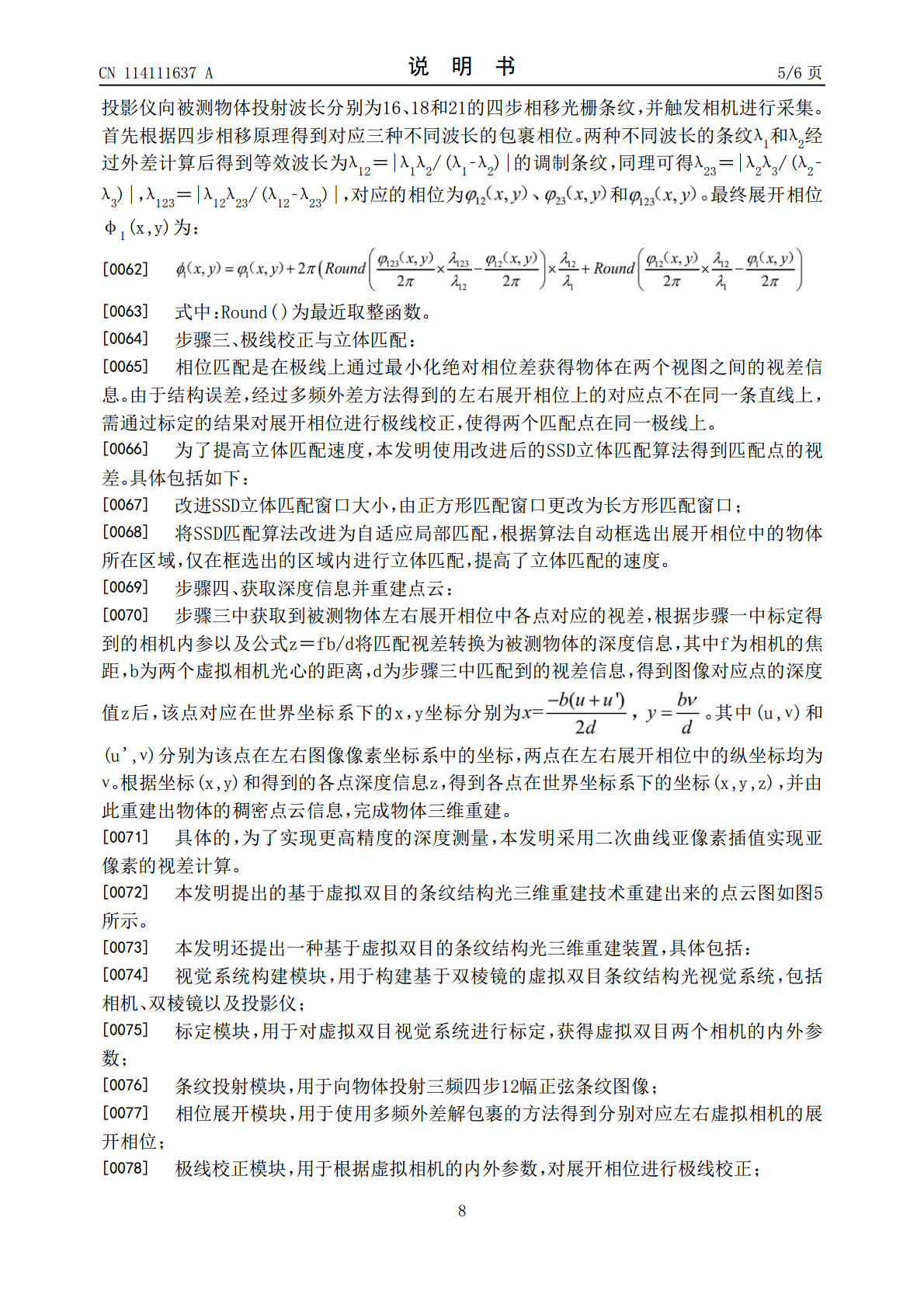
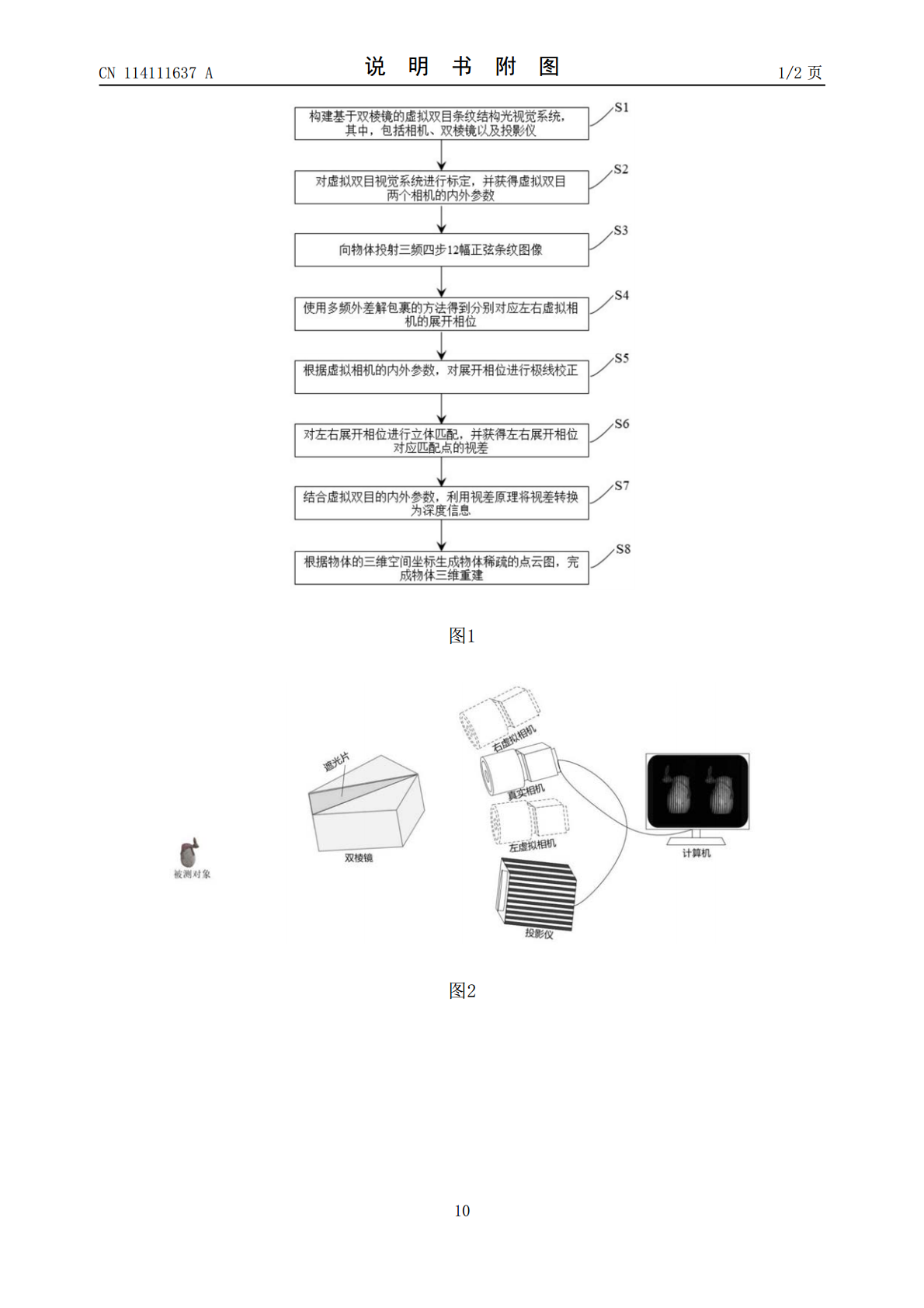
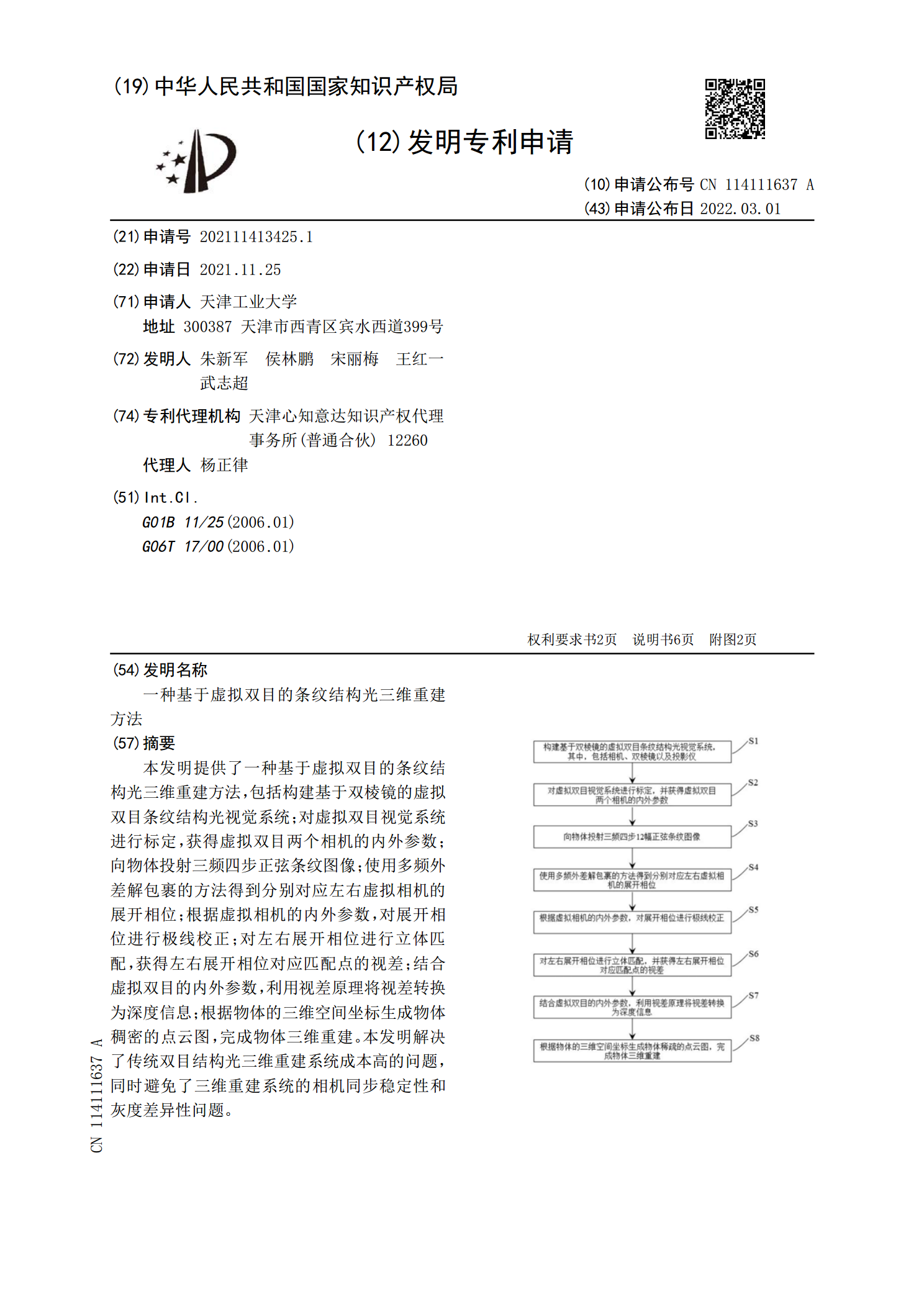
本发明提供了一种基于虚拟双目的条纹结构光三维重建方法,包括构建基于双棱镜的虚拟双目条纹结构光视觉系统;对虚拟双目视觉系统进行标定,获得虚拟双目两个相机的内外参数;向物体投射三频四步正弦条纹图像;使用多频外差解包裹的方法得到分别对应左右虚拟相机的展开相位;根据虚拟相机的内外参数,对展开相位进行极线校正;对左右展开相位进行立体匹配,获得左右展开相位对应匹配点的视差;结合虚拟双目的内外参数,利用视差原理将视差转换为深度信息;根据物体的三维空间坐标生成物体稠密的点云图,完成物体三维重建。本发明解决了传统双目结构光

基于彩色条纹结构光的三维重建方法研究的综述报告.docx
基于彩色条纹结构光的三维重建方法研究的综述报告彩色条纹结构光技术是一种基于光学原理的三维重建方法,它可以利用条纹的形变来获取物体表面的三维形状信息。本文将对基于彩色条纹结构光的三维重建方法进行综述。首先介绍了彩色条纹结构光技术的基本原理。这种技术主要是通过投射彩色条纹图案对目标物体进行光栅化,再通过相位测量法来获取物体表面的三维形状信息。由于彩色条纹可以提供更多的信息量,因此彩色条纹结构光技术相比于单色条纹结构光技术更加准确和精确。接着介绍了基于彩色条纹结构光的三维重建方法的具体实现。该方法主要包括三个步

一种结构光条纹图像的条纹中心提取方法.pdf
本发明属于机器视觉技术领域,具体涉及一种结构光条纹图像的条纹中心提取方法,S1、对于一幅结构光条纹图像,取每一列进行条纹中心计算得到一个中心坐标点,列坐标为当前列号,行坐标为计算所得的灰度中心,所述灰度中心是指以像素灰度为权重,计算相连像素集合中的行坐标中心,假设图像有m列,则最终计算得到m个条纹中心坐标;S2、设置一灰度阈值,对于常见的灰度图像,灰度阈值取值0到255之间的整数,对于每一列像素,统计该列中相连的且灰度值大于等于灰度阈值的像素,形成若干个像素集合,保留其中灰度值之和最大的像素集合,其余剔除

一种线结构光条纹中心提取方法.pdf
本发明涉及机器视觉技术领域领域,公开了一种线结构光条纹中心提取方法,本申请中Steger算法利用Hessian矩阵得到条纹的法线方向并对结构光条纹横截面上的灰度分布函数进行二阶泰勒展开得到亚像素中心,能达到亚像素的提取精度,但计算复杂度高,很难满足工业实时检测的要求,所以要求能在保证精度的同时简化计算步骤达到实时检测的目的,灰度重心法容易受到噪声的干扰,适用性不强。所以需要从精度、实时性和适用性三方面来设计条纹中心的提取方法。
一种基于多视角双目结构光的水下三维重建方法.pdf
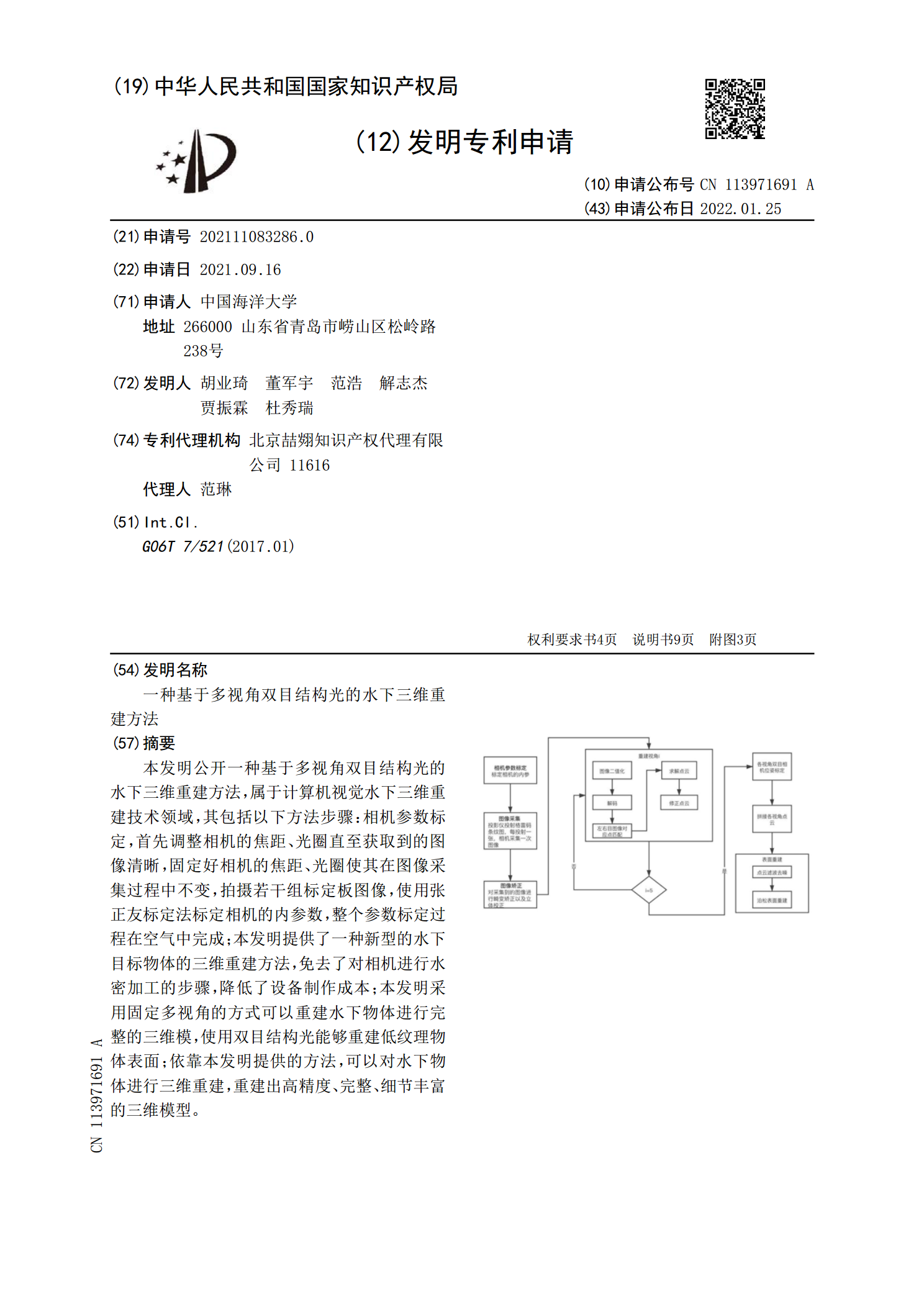
本发明公开一种基于多视角双目结构光的水下三维重建方法,属于计算机视觉水下三维重建技术领域,其包括以下方法步骤:相机参数标定,首先调整相机的焦距、光圈直至获取到的图像清晰,固定好相机的焦距、光圈使其在图像采集过程中不变,拍摄若干组标定板图像,使用张正友标定法标定相机的内参数,整个参数标定过程在空气中完成;本发明提供了一种新型的水下目标物体的三维重建方法,免去了对相机进行水密加工的步骤,降低了设备制作成本;本发明采用固定多视角的方式可以重建水下物体进行完整的三维模,使用双目结构光能够重建低纹理物体表面;依靠本